ELM.06. Eksploatacja i programowanie urządzeń i systemów mechatronicznych – Technik mechatronik 311410
bg‑gold
Naprawa układów napędowych
ATLAS INTERAKTYWNY
1
R1RxieJVVvEBI1
Atlas interaktywny „Naprawa układów napędowych” składa się ze spisu treści umieszczonego po lewej stronie oraz treści wyświetlanych w oknie głównym atlasu. W każdej zakładce znajdują się nagrania lektorskie tożsame z treścią.
Budowa i zasada działania silnika krokowego
Zastosowanie silników krokowych Tekst Silniki krokowe najczęściej znajdują zastosowanie w systemach przemysłowych, takich jak maszyny CNC, roboty przemysłowe, mieszalniki farb, ale także w drukarkach 3D (również laserowych i atramentowych), urządzeniach laboratoryjnych czy motoryzacji. Cechą wspólną elementów tych urządzeń (maszyn) jest to, że do pracy wymagają dokładnego położenia geometrycznego układu napędzanego przez dany silnik krokowy. Systemy napędowe z silnikami krokowymi, w porównaniu do np. silników indukcyjnych AC z układem falownika, dają możliwość bardziej precyzyjnego sterowania ruchem. Ilustracja Zdjęcie przedstawia ramię robota produkcyjnego w hali produkcyjnej. Poniżej podpis o treści: przykład zrobotyzowanego stanowiska wykorzystującego między innymi silniki krokowe do precyzyjnego sterowania układem współrzędnych, podajnikami oraz dozowaniem komponentów.
Zalety i wady silników krokowych Tekst Zalety silników krokowych to: prosta budowa i sterowanie; nie wymagają sygnału zwrotnego jak w przypadku serwonapędu; precyzyjna regulacja prędkości, praca na niskich prędkościach kątowych; możliwość kontroli kąta obrotu; wysoki moment obrotowy (maksymalny) przy niskich prędkościach; niski koszt (również układu sterowania); niska awaryjność. Wady. Silnik krokowy nie znajduje zastosowania w całym zakresie wymagań przemysłowych. W przypadku konieczności pracy napędu ze zmiennym obciążeniem lub stałym momentem obrotowym urządzenia lepszym rozwiązaniem będzie np. serwonapęd. Pobór prądu przez silnik krokowy jest niezależny od obciążenia, a urządzenie ma tendencje do nagrzewania się, gdy nie wykonuje obrotu (zużywa wówczas najwięcej prądu). Dodatkowo w niektórych układach występuje duży poziom hałasu w trakcie pracy z niskimi częstotliwościami. Ilustracje Dwa zdjęcia przedstawiające silniki krokowe, małe urządzenia o prostokątnym kształcie. Pierwsze zdjęcie pokazuje silnik w szarej obudowie, z oznaczeniami ostrzegawczymi i nalepką specyfikacji technicznej urządzenia. Na drugim zdjęciu widać kwadratowy, czarny element bez żadnych oznaczeń, podłączony do przewodów elektrycznych. Pod zdjęciem podpis: Przykład wykorzystania silnika krokowego w drukarce 3D.
Budowa i działanie silnika krokowego Tekst Silnik krokowy jest bezszczotkowym silnikiem prądu stałego zasilanym napięciem impulsowym, którego wał nie obraca się w sposób ciągły, ale podzielony jest na kroki. Poszczególne kroki odpowiadają obrotom o taką samą liczbę stopni kątowych. Przykładowo dla silnika o pojedynczym kroku równym obrotowi o kąt 1,8 stopnia do wykonania pełnego obrotu wału potrzeba 200 kroków. W tym przypadku parametr 200 nazywamy rozdzielczością silnika krokowego. Pojedynczy krok może również odpowiadać wartości kąta 5, 10, 90 czy 300 stopni. Dostępny jest również dokładniejszy tryb sterowania, zwany mikrokrokowym, na przyklad co pół stopnia, co jedną czwartą stopnia, a nawet z rozdzielczością do 5000 lub 50 000 kroków na obrót. Dlatego urządzenie to sprawdza się, pracując w trybie pozycyjnym, i przystosowane jest do wykonywania od ułamków do kilkuset obrotów na minutę. Ilustracja Schematyczny rysunek silnika krokowego z zaznaczonymi podstawowymi elementami budowy zewnętrznej. Wystający element w centrum silnika – wał silnika. Kwardatowa, metalowa obudowa – flansza (strona mocowania do urządzenia). Cztery otwory na rogach flanszy – otwory mocujące. Czarna wtyczka na zakończeniu kabli elektrycznych – złącze sygnałowe (A plus lub A minus, B plus lub B minus). Ilustracja Zdjęcie przedstawia budowę wewnętrzną silnika krokowego. Z lewej strony widoczne poszczególne cewki uzwojenia oraz stojan, z prawej rotor/wirnik oraz łożysko. Tekst Silnik krokowy składa się z rotora i stojana. Stojan silnika krokowego posiada pogrupowane uzwojenia (zwane fazami), na które w zależności od wymagań dotyczących pracy (np. kierunku obrotu) podawane są kolejno impulsy napięciowe. Pojedynczy impuls z układu sterowania podany na uzwojenie powoduje obrót wirnika o jeden krok. Ilustracja Schematyczna animacja pokazująca zasadę działania silnika krokowego unipolarnego. Widoczna okrągła obręcz. W jej środku obracające się koło zębate oraz cztery elektromagnesy rozmieszczone równomiernie po każdej stronie i podpisane numerami 1,2,3,4. Na górze żółty trójkąt powiększający się wraz z obrotem koła. Kolejne etapy obrotu są opisane: 1 Załączony elektromagnes górny przyciąga najbliższe zęby wirnika, przesuwając go. 2 Elektromagnes górny jest wyłączony, załączony elektromagnes numer 2 przyciąga najbliższe zęby wirnika, przesuwając go. 3 Elektromagnesy numer 1 oraz 2 są wyłączone, załączony elektromagnes numer 3 przyciąga najbliższe zęby wirnika, przesuwając go o kolejny krok; 4 Elektromagnesy numer 1, 2 oraz 3 są wyłączone, załączony elektromagnes numer 4 przyciąga najbliższe zęby wirnika, przesuwając go o kolejny krok.
Sterowanie silnikiem krokowym Tekst Do sterowania tych urządzeń wykorzystywane są sterowniki zewnętrzne, sterowniki PLC czy komputery PC posiadające wyjścia cyfrowe. Przy ich pomocy w podstawowej wersji ustawiamy odpowiednią pozycję silnika lub sterujemy jego prędkością. Ilustracja Zdjęcie przedstawia czarny, prostokątny element z oznaczeniami technicznymi. Po jego prawej stronie rząd 12 małych śrubek w zielonej obudowie. Pod grafiką podpis: Sterownik silnika krokowego o poborze prądu w zakresie regulowanym od 0,2 do 5 amperów na cewkę, napięcie zasilania od 12 do 48 woltów. Tekst Sterownik mocy to integralna część układu napędowego, w którym pracuje silnik krokowy, dostarcza on energię do pasm uzwojeń silnika krokowego. W zależności od wersji sterowniki mocy posiadają nawet do kilku modułów napędowych, co umożliwia sterowanie z jednego urządzenia kilkoma silnikami. Dla każdego modułu prąd powinien być regulowany indywidualnie w zakresie np. od 0,5 do 5 amperów, podział kroku również powinien być regulowany osobno. Niektóre sterowniki dają możliwość ustawiania wartości pobieranego prądu podczas postoju silnika, normalnej pracy czy dużego przyspieszania. Protokół sterownika w podstawowej wersji potrzebuje trzech głównych informacji do sterowania: pin załączania – niski lub wysoki stan odpowiednio załącza lub wyłącza sterowanie, najczęściej oznaczony EN plus, EN minus; pin kierunku – niski lub wysoki stan odpowiednio załącza obrót silnika w jednym lub drugim kierunku, najczęściej oznaczony DIR plus, DIR minus; pin kroku – przejście ze stanu niskiego do wysokiego (lub odwrotnie, w zależności od ustawień silnika) powoduje wykonanie jednego kroku, najczęściej oznaczony PUL plus, PUL minus. Ilustracja Widok oznaczeń poszczególnych wyprowadzeń na sterowniku silnika krokowego. Teskt Napędy silników krokowych zasilane są napięciem stałym DC o wartości 12 lub 24 woltów. Nowsze konstrukcje mogą być również zasilane napięciem zmiennym 120/230 V. Najczęściej wykorzystywane są zasilacze impulsowe, które dobieramy w zależności od wielkości obciążenia (o dużej obciążalności chwilowej). Przykładowo dla układu obciążenia, wymagającego prądu o wartości 2 ampery i prądzie silnika krokowego wynoszącym 3 ampery, należy dobrać zasilacz o wydajności prądowej w zakresie od 6 do 8 amperów. Zasilacze powinny posiadać wbudowane kondensatory elektrolityczne o dużej pojemności (gromadzenia energii), dzięki którym możliwe jest odbierane energii oddawanej przez silnik podczas hamowania. Duże pojemności pozwalają też na redukcję tętnień napięcia. Ilustracja Przykładowy fragment schematu przedstawiający podłączenia silników krokowych poprzez sterownik z płytą główną maszyny (frezarka). Na schemacie oznaczono następujące elementy: silniki, sterowniki silników, płytę główną, bezpieczniki, wrzeciono, pompę chłodziwa oraz pozycje x,y i z.
Podział silników krokowych Ilustracja Schemat tekstowy prezentujący podział silników krokowych. Na samej górze „Elektryczne silniki krokowe”, które dzielą się na wirujące i liniowe. Wirujące podzielone na 3 grupy: „o wirniku reluktancyjnym”, „o magnesach trwałych” i „hybrydowy”. Grupa pierwsza, „o wirniku reluktancyjnym” podzielona na „jednosegmentowy” i „wielosegmentowy”. Jednosegmentowy podzielony na „o jednym zębie wirnika na bigun stojaka” oraz „o kilku zębach wirnika na biegun stojaka”. Grupa „o jednym zębie wirnika na biegun stojaka” podzielona na „wariant symetryczny” oraz „wariant niesymetryczny”. Grupa „o kilku z zębach wirnika na biegun stojaka” również podzielona na wariant symetryczny i niesymetryczny. Grupa druga elektrycznych silników krokowych wirujących, czyli „o magnesach trwałych” dzieli się na „jednosegmentowy” i „wielosegmentowy”. „Jednosegmentowy” podzielony jest na „o biegunach jawnych” oraz „o biegunach utajnionych”. Trzecie grupa elektrycznych silników krokowych wirujących, czyli „hybrydowy” dzieli się na grupy „o magnesach trwałych na stojanie” oraz „o magnesach trwałych na wirniku”. „O magnesach trwałych na wirniku” podzielona jest na „jednosegmentowy” i „wielosegmentowy”. Elektryczne silniki krokowe liniowe podzielone są na dwie grupy: „o zmiennej reluktancji” i „hybrydowe”. Tekst Najczęściej wykorzystywane są silniki z krokowe z magnesem trwałym (PM, z angielskiego Permanent Magnet) lub silniki hybrydowe. Silniki z magnesem stałym mają najczęściej rozdzielczość od 24 do 48 kroków na obrót, natomiast silniki hybrydowe standardowo dysponują rozdzielczością od 100 do 400 kroków na pełen obrót. Dodatkowo zaletą silników krokowych hybrydowych jest osiąganie wyższych momentów trzymających (brak ruchu silnika) przy zbliżonych parametrach konstrukcyjnych do silników z magnesem stałym. Ilustracja Zdjęcie przedstawia silnik krokowy w przeźroczystej obudowie, dzięki której widoczne jest wnętrze - poszczególne cewki uzwojenia.
Parametry silnika krokowego
Najważniejsze parametry silnika krokowego Tekst Najważniejsze parametry silnika krokowego to: napięcie znamionowe uzwojeń, napięcie zasilania, nominalne natężenie prądu, jakie można stosować, by nie przeciążać i nie przegrzewać silnika, rezystancja uzwojenia, moment bezwładności rotora – moment bezwładności samego, nieobciążonego rotora, moment trzymający – moment nieruchomego silnika (nie kręci się) przy zasilaniu znamionowym prądem, maksymalna prędkość pracy (bez obciążenia), prędkość silnika krokowego zależna jest od częstotliwości sygnału sterującego (im większa częstotliwość, tym większa prędkość), wymiar długości korpusu silnika, zazwyczaj wzdłuż osi obrotu (zwykle A lub L), masa – waga silnika. Ilustracja Zdjęcie przedstawia czteroprzewodowy silnik krokowy z gwintowanym wałem umożliwiający wykorzystanie urządzenia jako siłownik liniowy. Od silnika odchodzą 4 kolorowe kable elektryczne zwinięte w pętlę.
Wymiary silników krokowych Tekst Wielkość silników krokowych została znormalizowana przez NEMA (z angielskiego National Electrical Manufacturers Association) i odnosi się do wymiaru obudowy, a dokładnie flanszy, czyli elementu obudowy, który służy do mocowania silnika. Przykładowe oznaczenie silnika NEMA 8 (8 to oznaczenie w calach) dotyczy silnika o rozmiarze flanszy 20 na 20 milimetrów (w przybliżeniu 8 razy 2,54 równa się 20). Ilustracja Zdjęcie przedstawia silnik krokowy, rzut z góry, widoczny wał oraz flansza z otworami mocującymi oraz fragment trzech kolorowych kabli odchodzących od boku silnika. Na bocznym elemencie obudowy silnika znajduje się naklejka z danymi technicznymi. Pod zdjęciem podpis: Czteroprzewodowy silnik krokowy o rozdzielczości 200 kroków (1,8 stopnia). Napięcie zasilania 3 wolty, maksymalny pobór prądu na cewkę 2,8 amperów. Moment wynosi 1,89 niutonometra. Wymiary NEMA 23 (56 na 56 na 76 milimetrów). Tabela Tabela zawiera 3 kolumny i 12 wierszy. Pierwszy wiersz zawiera tytuły kolumn: rozmiar NEMA, rozmiar flanszy, stosowane długości silnika krokowego. W kolejnych wierszach umieszczone następujące dane. Wiersz drugi: rozmiar NEMA 8, rozmiar flanszy 20 na 20 milimetrów, stosowane długości silnika krokowego od 28 do 33 milimetrów. Wiersz trzeci Wiersz drugi: rozmiar NEMA 8, rozmiar flanszy 20 na 20 milimetrów, stosowane długości silnika krokowego od 28 do 33 milimetrów. Wiersz trzeci: rozmiar NEMA 11, rozmiar flanszy 28 na 28 milimetrów, stosowane długości silnika krokowego od 28 do 50 milimetrów. Wiersz czwarty: rozmiar NEMA 14, rozmiar flanszy 35 na 35 milimetrów, stosowane długości silnika krokowego od 28 do 33 milimetrów. Wiersz piąty rozmiar NEMA 16, rozmiar flanszy 39 na 39 milimetrów, stosowane długości silnika krokowego od 20 do 40 milimetrów. Wiersz szósty rozmiar NEMA 17, rozmiar flanszy 42 na 42 milimetrów, stosowane długości silnika krokowego od 28 do 48 milimetrów. Wiersz siódmy: rozmiar NEMA 23, rozmiar flanszy 57 na 57 milimetrów, stosowane długości silnika krokowego od 41 do 112 milimetrów. Wiersz ósmy: rozmiar NEMA 24, rozmiar flanszy 60 na 60 milimetrów, stosowane długości silnika krokowego od 45 do 90 milimetrów. Wiersz dziewiąty: rozmiar NEMA 32, rozmiar flanszy 80 na 80 milimetrów, stosowane długości silnika krokowego od 63 do 150 milimetrów. Wiersz dziesiąty: rozmiar NEMA 34, rozmiar flanszy 86 na 86 milimetrów, stosowane długości silnika krokowego od 63 do 150 milimetrów. Wiersz jedenasty: rozmiar NEMA 43, rozmiar flanszy 110 na 110 milimetrów, stosowane długości silnika krokowego od 115 do 165 milimetrów. Wiersz dwunasty: rozmiar NEMA 51, rozmiar flanszy 134 na 134 milimetrów, stosowane długości silnika krokowego od 115 do 226 milimetrów.
Prędkość obrotowa silnika krokowego Prędkość rotacji silnika względem częstotliwości: 1 Herc równa się 0,12 obrotów na minutę; 8,(3) Herc równa się = 1 obrotów na minutę; 500 Herc równa się 60 obrotów na minutę; 2000 Herc równa się 240 obrotów na minutę; 3000 Herc równa się 360 obrotów na minutę; 5000 Herc równa się 600 obrotów na minutę. Przykładowy stopień obrotu względem impulsu: 1 impuls równa się 0,72 stopnia; 125 impulsów równa się 90 stopni; 250 impulsów równa się 180 stopni; 500 impulsów równa się 360 stopni.
Najczęstsze usterki przy pracy układów z silnikiem krokowym
Podstawowy zakres temperaturowy pracy silników krokowych Tekst Każde urządzenie elektryczne podczas pracy generuje ciepło. Należy pamiętać, aby warunki środowiska pracy pozwalały na odpowiednie chłodzenie całego układu napędowego (głównie silnika krokowego oraz układu sterownika). Temperatura pracy silników krokowych podawana przez producentów najczęściej mieści się w zakresie od 0 do 60 stopni Celsjusza. Poszczególne układy są zaprojektowane do pracy, przy wykorzystaniu maksymalnych parametrów, w temperaturach od 80 do 90 stopni Celsjusza. Maksymalna temperatura (według producentów) nie powinna przekraczać 130 stopni Celsjusza. Ilustracje Zdjęcie przedstawia radiator – kwadratowy przedmiot z prostokątnymi wypustkami, równo ułożonymi w szeregach. W środku przedmiotu pusta, okrągła przestrzeń. Kolejne zdjęcie przedstawia ten sam radiator zamocowany na silniku krokowym. Podpis zdjęcia: Radiator o wymiarach 40 na 40 na 11 milimetrów oraz przykład ego mocowania na śruby M3 do silnika krokowego z serii NEMA 17. Radiator umożliwia szybsze odprowadzenie ciepła na zewnątrz silnika.
Objawy – wibracje silnika Tekst Jeden. Sprawdź, czy silnik krokowy jest dobrze zamontowany (połączenia śrubowe) oraz czy elementy połączenia wału nie uległy uszkodzeniu. Luźne elementy oraz złe spasowanie wału mogą powodować drgania (rezonans mechaniczny silnika), a następnie utratę kroków. Dwa. Sprawdź, czy częstotliwość generowana przez kontroler nie jest zbyt wysoka, i nie przekracza dopuszczalnych parametrów dla danego zestawu silnik krokowy - sterownik. Silniki krokowe wykazują tendencję do największych drgań dla różnych, charakterystycznych dla siebie częstotliwości. Należy unikać pracy przy tych częstotliwościach. Trzy. Sprawdź, czy częstotliwość rozruchu nie jest zbyt wysoka lub dodatkowo nie został programowo ustawiony niewłaściwy proces przyspieszania (lub jego parametry), co może powodować niestabilną pracę silnika. Cztery. Sprawdź, czy parametry prądowe wysyłane przez sterownik zostały dobrane właściwie, zgodnie z zaleceniami producenta dla danego zestawu silnik krokowy - sterownik (np. nominalny prąd sterujący powinien przekroczyć wartość 10 miliamperów dla układów z transoptorem). Pięć. Sprawdź, czy przewody poszczególnych cewek silnika krokowego A plus A minus, B plus B minus, zostały prawidłowo podłączone oraz czy nie są one uszkodzone. Sześć. Sprawdź, czy napięcie sterujące silnikiem zawiera się w zakresie wymaganym przez producenta zestawu silnik krokowy - sterownik. Siedem. Sprawdź, czy opis producenta dla danego silnika krokowego lub zestawu (wymagania parametry i warunki pracy) nie zawiera wytycznych dotyczących obszaru rezonansu mechanicznego np. przy niskiej prędkości. Jeśli tak, należy uwzględnić te wytyczne lub przebudować układ. Ilustracje Grafika przedstawia wykres drgań podczas kroku. Oś x to prędkość w kilohercach, oś y to wibracja napięcia. Krzywa wykresu składa się z kilku pików i osiąga najwyższą wartość wibracji napięcia przy prędkości około 0,3 kiloherza. Kolejna grafika to schemat wykresu pojedynczego kroku silnika z opisanymi fragmentami krzywej. Pierwszy – start silnika, rozpędzanie. Drugi – stabilizacja wzdłuż punktu docelowego. Trzeci – osiągnięcie punktu stabilności. Na wykresie oznaczono również ruch wsteczny, ruch w przód, które występują w fragmencie drugim opisanej krzywej. Następna grafika to przykłady trzech różnych wykresów kolejnych kroków silnika, dla trzech różnych częstotliwości. Kolejna grafika to zdjęcie amortyzatora drgań. Pokazany metalowy przedmiot w kształcie nieregularnego kwadratu z okrągłym otworem wewnątrz. Kolejne zdjęcie to przykład mocowania amortyzatora do silnika krokowego. Podpis zdjęcia: Amortyzator drgań oraz przykład jego mocowania do silnika krokowego z serii NEMA 17. Element ten zbudowany jest z dwóch metalowych blaszek połączonych elementami gumowymi, co umożliwia reedukację hałasu oraz wibracji powstających podczas normalnej pracy układu napędowego. Taki zestaw najczęściej wykorzystywany jest w drukarkach 3D.
Objawy – silnik kręci się tylko w jedną stronę Tekst Często skutkiem usterek układu silnika krokowego jest jego obrót tylko w jednym kierunku, podczas gdy wymagany jest ruch dwukierunkowy. Poniżej zestawiono najczęstsze przyczyny takiego stanu. Zasilanie układu silnika. Jeden. W układach silników krokowych wymagane jest stabilne zasilanie. Jeśli napięcie zasilania silnika jest za niskie lub zmienia się znacząco w zależności np. od obciążenia, silnik może obracać się tylko w jednym kierunku. Należy sprawdzić, czy zasilacz został dobrany prawidłowo, a następnie upewnić się, czy podczas pracy działa prawidłowo (np. poprzez pomiar wartości napięcia i prądu miernikiem). Dwa. Nieprawidłowe podłączenie wyprowadzeń układu. Usterka ta obejmuje nieprawidłowe podłączenie linii sygnałowych lub nieprawidłowe podłączenie kolejności faz silnika. Posługując się schematem układu oraz dokumentacją producenta, należy sprawdzić, czy połączenie poszczególnych elementów układu jest prawidłowe. W przypadku łatwego dostępu możemy zamienić wyprowadzenia silnika krokowego A plus A minus lub B plus B minus, aby sprawdzić, czy zmienia się kierunek obrotu silnika. Trzy. Uszkodzenia mechaniczne silnika. Każde zewnętrze uszkodzenie obudowy silnika (np. poprzez uderzenie, zgniecenie), zwłaszcza przy mniejszych gabarytach (od NEMA 6 do NEMA 16), może powodować nieprawidłowe jego działania. Pomiędzy wirnikiem a stojanem wewnątrz silnika fabrycznie zaprojektowany jest odpowiedni odstęp. Każda ingerencja w asymetrię obwodu magnetycznego, uszkodzenie lub skorodowanie może powodować, że silnik będzie obracać się tylko w jednym kierunku lub zablokuje się podczas pracy. W takim przypadku należy wymontować silnik, zdemontować poszczególne elementy i wymienić uszkodzone części. W trakcie tych prac wykonuje się również czyszczenie wnętrza silnika. Cztery. Uszkodzenie cewki silnika. Zwarcie lub przerwanie obwodu w uzwojeniu silnika krokowego może spowodować jego ruch tylko w jedną stronę. Sprawdzenie poszczególnych wyprowadzeń cewek możemy wykonać omomierzem po odłączeniu układu od sterowania oraz zasilania. Jeśli producent dopuszcza taką możliwość, wykorzystując dokumentację, przystępujemy do demontażu silnika i wymiany uszkodzonej części na nową (dostarczoną przez producenta lub odpowiednio dobrany zamiennik). Nieprawidłowo dobrany sterownik silnika krokowego. Pięć. Część sterowników zaprojektowana jest do otrzymywania jednokierunkowego trybu sterowania impulsowego. Taki sterownik wysyła impulsy również w jednym kierunku do silnika, co prowadzi do obrotu silnika tylko w jednym kierunku. W takim przypadku należy sprawdzić parametry sterownika, jego zgodność z dokumentacją i wymaganiami pracy. W przypadku niezgodności wymieniamy sterownik na właściwy lub zmieniamy programowo sposób sterowania (jeśli jest taka możliwość). Sześć. Nieprawidłowa kolejność faz silnika. W celu wykonania określonego ruchu silniki krokowe muszą być sterowane we właściwej kolejności faz. Nieprawidłowa sekwencja może spowodować obracanie się silnika tylko w jednym kierunku. W takim przypadku należy sprawdzić odłączenia kolejności faz, ewentualnie dokonać korekty, aby zapewnić normalną pracę silnika. Siedem. Podłączenie poszczególnych elementów, złącza. Nieprawidłowości w stykach poszczególnych połączeń mogą powodować niewłaściwą pracę. Wszystkie złącza lub skręcane połączenia przewodowe należy sprawdzić wizualnie pod kątem uszkodzeń lub np. korozji. Sprawdzenie przewodzenia poszczególnych odcinków przewodów, pinów oraz złącz możemy wykonać omomierzem, odłączając zasilanie oraz układ sterowania. Ilustracje Zdjęcie przedstawia blaszany element w kształcie litery L. Na jednym boku elementu znajduję się duży okrągły otwór. Podpis zdjęcia: Mocowanie typu L do silników krokowych z serii NEMA 43 (86 milimetrów) umożliwiające łatwą regulację pozycji silnika oraz częściowo zabezpieczające silnik przed uszkodzeniami mechanicznymi. Uchwyt wykonany z blachy o grubości 6 milimetrów. Następne zdjęcie przedstawia zbliżenie na element połączenia silnika krokowego z kablami elektrycznymi. Podłączone są cztery kable elektryczne, od lewej niebieski, żółty, zielony i czerwony. Podpis zdjęcia: Prawidłowo zaciśnięte końcówki przewodów oraz prawidłowo zamontowane złącze sygnałowe silnika krokowego.
Objawy – utrata fazy w silnikach krokowych Tekst Usterka objawia się tym, że podczas pracy silnika prąd nie zasila danej fazy, co powoduje, że nie wytwarza ona pola magnetycznego. Silnik krokowy traci zdolność do precyzyjnej jazdy krokowej, nie daje się uruchomić lub wibruje. W szczególnym przypadku silnik może się obracać, ale wibracje są na tyle duże, że wykona ruch o kilka kroków do przodu lub kilka kroków do tyłu. Z powodu braku fazy silnik nie jest w stanie utrzymać momentu obrotowego. Najczęstszą przyczyną utraty fazy silnika krokowego jest zwarcie w obwodzie danej cewki, uszkodzenie sterownika silnika lub duże wahania napięcie zasilania silnika. W pierwszej kolejności należy dokonać sprawdzenia obwodu cewek omomierzem, dokonać pomiaru napięcia zasilania podczas pracy oraz sprawdzić okablowanie pod kątem uszkodzeń i przerw w obwodzie. Podstawowe czynności do wykonania w przypadku:
uszkodzenia cewki – wymiana cewki na nową lub wymiana silnika na nowy, następnie unikanie przeciążania silnika, które może spowodować ponowne uszkodzenie cewki;
niestabilnej wartości napięcia zasilania – wymiana zasilacza, następnie okresowa kontrola napięcia zasilania oraz unikanie stosowania wartości napięć przekraczających zakres podany przez producenta (zbyt niskie lub zbyt wysokie napięcie);
zaniku lub przerw podawania sygnałów sterowania – wymiana okablowania lub złącz;
nieprawidłowości w podłączeniu okablowania sygnałów sterujących – sprawdzenie prawidłowości połączeń zgodnie z dokumentacją producenta.
Objawy – funkcja wyświetlania błędów na panelu sterownika Bardzo dobrym rozwiązaniem w układach silników krokowych jest stosowanie sterowników z wbudowaną funkcją wyświetlania błędów. Przydatne jest to w rozbudowanych układach od kilku do kilkunastu silników krokowych oraz w środowisku występowania zewnętrznych zakłóceń sygnału sterującego (głównie drgania i przerwy sygnału wyjściowego sterownika). W pozostałych przypadkach, jeśli zastosowanie takiego sterownika jest zbyt drogie, pozostaje obserwacja pracy silnika w jego środowisku pracy. W celu uniknięcia zakłóceń zewnętrznych można zastosować specjalne filtry lub sterowniki z wbudowanym układem wygładzającym sygnał wyjściowy. Takie urządzenie jest wymagane np. w środowisku pracy przecinarki plazmowej CNC ze względu na występujące duże chwilowe wartości prądu w układzie.
Objawy – niska wydajność oraz nagrzewanie się silnika krokowego Tekst Najczęściej ogólną przyczyną tej nieprawidłowości jest niedopasowanie sterowania z silnikiem krokowym i jego obciążeniem. Po wykryciu takiej wadliwej pracy układ powinien być sprawdzony, ponownie przeanalizowany lub przeprojektowany przez inżyniera. Brak zmian w układzie spowoduje nieodwracalne uszkodzenie silnika lub sterownika (kontrolera).
Podstawowe zasady uruchamiania układów napędowych z silnikiem krokowym Tekst Uwagi do uruchamiania układów napędowych z silnikiem krokowym. Jeden. Producenci silników krokowych zalecają ustawienie punktu pracy silnika z wartością w zakresie od 80 do 90 procent wartości prądu znamionowego. Powoduje to nieznaczne obniżenie momentu na wale silnika, wydłużając jego żywotność. Nigdy nie powinniśmy ustawiać prądu silnika powyżej wartości znamionowej. Dwa. Należy pamiętać, że wzrost prądu oraz napięcia zasilania silnika krokowego powoduje zwiększenie temperatury jego pracy, co może prowadzić do rozmagnesowania termicznego i uszkodzenia całego układu. Trzy. Nie należy przekraczać maksymalnej siły przyłożonej do wału silnika krokowego podczas np. montażu pasa napędowego. Nadmierne naprężenia działające na wał silnika krokowego mogą doprowadzić do jego odkształcenia lub uszkodzenia łożysk silnika; w obu przypadkach silnik będzie wymagał wymiany. Cztery. W przypadku instalacji silnika krokowego w środowisku, w którym występuje np. wysokie zapylenie, należy pamiętać o dodatkowych uszczelnieniach obudowy, tak aby pył nie przedostawał się do wnętrza silnika. Może to spowodować zablokowanie jego ruchu. Pięć. Praca całego układu napędowego zależna jest również od jakości i technologii wykonania sterownika. Wybierając odpowiednie urządzenie i jego miejsce instalacji, należy pamiętać również o wymaganiach środowiskowych i warunkach pracy. Sześć. Należy pamiętać, aby nie modyfikować konstrukcji, nie ucinać ani nie nawiercać wału silnika. Osłabienie konstrukcji, w tym osi silnika, skutkować będzie utratą momentu napędowego oraz inną odpornością temperaturową. Siedem. Podczas montażu elementów elektronicznych należy używać przeznaczonych do tego narzędzi precyzyjnych. Nie powinniśmy używać młotka podczas montowania do wału silnika koła pasowego, zębatego czy sprzęgła. Skutkować to będzie uszkodzeniem łożysk lub odklejeniem się cewek od stojana i zablokowaniem pracy silnika. Ilustracja Tabela pod tytułem przykład maksymalnych sił, jakie mogą działać na wał w zależności od wielkości silnika, przy odległości 20 milimetrów od flanszy. Tabela składa się z czterech kolumn i dwunastu wierszy. Wiersz pierwszy zawiera nagłówki kolumn: wielkość silnika, średnica osi, siła promieniowa, siła wzdłuż osi. Wiersz drugi jest pusty. Kolejne wiersze zwierają następujące dane. Wiersz trzeci: wielkość silnika Nema 8, średnica osi 4 milimetry, siła promieniowa 20 newtonów, siła wzdłuż osi 2 newtony. Wiersz czwarty: wielkość silnika Nema 11, średnica osi 5 milimetrów, siła promieniowa 28 newtonów, siła wzdłuż osi 10 newtonów. Wiersz piąty: wielkość silnika Nema 14, średnica osi 5 milimetrów, siła promieniowa 28 newtonów, siła wzdłuż osi 10 newtonów. Wiersz szósty: wielkość silnika Nema 16, średnica osi 5 milimetrów, siła promieniowa 28 newtonów, siła wzdłuż osi 10 newtonów. Wiersz siódmy: wielkość silnika Nema 17, średnica osi 5 milimetrów, siła promieniowa 28 newtonów, siła wzdłuż osi 10 newtonów. Wiersz ósmy: wielkość silnika Nema 23, średnica osi 6,35 milimetrów, siła promieniowa 75 newtonów, siła wzdłuż osi 15 newtonów. Wiersz dziewiąty: wielkość silnika Nema 24, średnica osi 8 milimetrów, siła promieniowa 75 newtonów, siła wzdłuż osi 15 newtonów. Wiersz dziesiąty: wielkość silnika Nema 34, średnica osi 12,7 - 14 milimetrów, siła promieniowa 220 newtonów, siła wzdłuż osi 60 newtonów. Wiersz jedenasty: wielkość silnika Nema 42, średnica osi 19 milimetrów, siła promieniowa 220 newtonów, siła wzdłuż osi 60 newtonów. Wiersz dwunasty: wielkość silnika Nema 52, średnica osi 19 milimetrów, siła promieniowa 220 newtonów, siła wzdłuż osi 60 newtonów. Następna grafika przedstawia duży kwadrat oraz wąski i długi prostokąt przylegający do kwadratu. Jest to schematyczny rysunek wału silnika krokowego z oznaczeniami długości wału: 0 milimetrów zaraz przy silniku, następnie na wale oznaczone odpowiednie długości: 10 milimetrów, 20 milimetrów, 30 milimetrów, 40 milimetrów.
Naprawa układów napędowych z silnikiem krokowym Tekst Naprawa uszkodzonego napędu maszyny. Uszkodzeniu uległ jeden z napędów sterowania pozycją frezarki. Należy sprawdzić, co jest przyczyną awarii układu i usunąć usterkę. Układ podłączenia napędu przedstawia rysunek, wykorzystano w nim silnik krokowy NEMA 23 czteroprzewodowy bipolarny. Ilustracja Schemat przedstawia połączenie elementów układu napędowego z silnikiem krokowym. Na schemacie zaznaczone następujące elementy: silnik, zasilacz silnika krokowego, napęd mikrokrokowy, szyna zasilająca DS. W poszczególnych układach podane wartości techniczne. Tekst Po wstępnym sprawdzeniu okazało się, że przewód sterujący silnikiem krokowym został zerwany. Dlatego układ napędowy nie działa. Silnik był podłączony do gniazda w napędzie mikrokrokowym z oznaczeniami A plus, A minus, B plus, B minus. Są to odpowiednie wyprowadzenia cewek silnika krokowego. Ilustracja Grafika przedstawia symbol silnika czteroprzewodowego bipolarnego. Na środku litera M w kółku. Po prawej stronie A plus i A minus połączone linią o nieregularnym kształcie. Na dole grafiki B plus i B minus połączone linią o nieregularnym kształcie. Tekst Przewody sygnałowe silnika nie są oznaczone. Aby układ działał prawidłowo, trzeba rozpoznać odpowiednie pary przewodów, które są wyprowadzeniami poszczególnych cewek. W tym celu posłużymy się miernikiem uniwersalnym (multimetrem) z zakresem ustawionym na pomiar diody z dodatkową sygnalizacją dźwiękową. Tę samą czynność można wykonać z zakresem ustawionym na pomiar omomierzem. Ilustracja Grafika przedstawia wyprowadzenie cewek badanego silnika krokowego. W centrum silnik krokowy. Po obu jego stronach sprężyny i połączone z nimi oznaczenia. Po lewej stronie A plus połączone żółtą długą linią, A minus połączone krótką, zieloną linia. Po prawej stronie silnika B minus połączone długą, niebieską linią i B plus połączone krótką, czerwoną linia. Tekst Przystawiamy jeden z przewodów pomiarowych miernika do jednego z czterech przewodów silnika (po usunięciu izolacji z końców), a następnie drugim przewodem pomiarowym dotykamy po kolei pozostałych przewodów. Jeśli miernik pokaże „przejście” (zadziała również sygnał dźwiękowy lub miernik wskaże zero w przypadku pomiaru na zakresie omomierza) oznacza to, że znaleźliśmy właściwe wyprowadzenia jednej z dwóch cewek. Pozostałe dwa przewody to wyprowadzenia drugiej cewki, które też sprawdzamy. Oznaczamy odpowiednio poszczególne pary np. przy pomocy kolorowej taśmy izolacyjnej. Ilustracje Trzy grafiki przedstawiające pojedynczy pomiar dwóch przewodów silnika krokowego za pomocom miernika. Na pierwszej grafice prostokątny przedmiot z wyświetlaczem, okrągłą skalą oraz oznaczeniami technicznymi – miernik. Na wyświetlaczu cyfra jeden. Pod miernikiem prostokątne urządzenie z okrągłym otworem podpisane silnik krokowy. Do miernika za pomocą czarnego i czerwonego przewodu podłączone są dwie elektrody. Czarna elektroda dotyka pierwszej żyły przewodu silnika, a czerwona czwartej. Podpis pod grafiką: Pojedynczy pomiar dwóch przewodów silnika krokowego, miernik nie pokazuje „przejścia”. Na drugiej grafice elektrody przyłożone są do pierwszej i drugiej żyły przewodu. Wartość na wyświetlaczu zero zero trzy. Podpis pod grafiką: Pojedynczy pomiar dwóch przewodów silnika krokowego, miernik pokazuje „przejście”. To jest właściwa para wyprowadzeń cewki. Na trzeciej grafice do silnika krokowego dołączone są dwie cewki. Do lewej cewki przylegają elektrody. Na wyświetlaczy miernika wartość zero zero trzy. Podpis pod grafiką: Pojedynczy pomiar dwóch przewodów silnika krokowego, miernik pokazuje „przejście”, umowne przedstawienie właściwej pary wyprowadzeń cewki. Tekst Uwaga! W przypadku gdy podczas pomiaru multimetr nie zmieni stanu (nie pokaże przejścia na żadnej parze przewodów), może to oznaczać uszkodzenie cewek i silnika (np. zerwały się wewnętrzne przewody ze zwoju cewki). Jeśli natomiast multimetr zmieni stan trzy lub cztery razy, może to oznaczać uszkodzenie/zwarcie w silniku (np. przepalenie wewnętrznego przewodu miedzianego). W obu przypadkach należy wymienić silnik na nowy. Ilustracja Zdjęcie przedstawia uzwojenia cewek wewnątrz silnika. Wewnątrz cylindrycznej, metalowej obudowy silnika ułożone są po obwodzie szpule z nawiniętym, miedzianym drutem. Podpis pod zdjęciem: uzwojenia cewek wewnątrz silnika, które mogą ulec uszkodzeniu np. z powodu przegrzania. Tekst Następnie należy odpowiednio przygotować końcówki przewodów sygnałowych (wyprowadzenia cewek), aby prawidłowo zamontować je w gnieździe napędu mikrokrokowego: przycinamy przewody na jednakową długość przy pomocy obcinaczek; zdejmujemy izolację zewnętrzną; wykonujemy pokrycie cyną końców przewodów, które będą zamocowane w gnieździe; montujemy przewody w gnieździe przy pomocy wkrętaka – jedna para cewki do wyprowadzeń A plus A minus, druga para cewki do wyprowadzeń B plus B minus. Ilustracje Zdjęcie przedstawia cztery przewody elektryczne. Fragment każdego przewodu jest w obudowie izolacyjnej. Każdy przewód jest w innym kolorze: niebieski, zielony, czerwony oraz żółty. Końcówki przewodów pozbawione są izolacji. Kolejne zdjęcie przedstawia montaż przewodów w gnieździe. Pokazany fragment sterownika silnika krokowego, z szeregowo ułożonymi dwunastoma gniazdami do montażu przewodów. Od lewej – gniazdo drugie oznaczone B minus, gniazdo trzecie oznaczone B plus, gniazdo czwarte oznaczone A minus, gniazdo piąte oznaczone A plus. Tekst Po prawidłowym podłączeniu silnika krokowego włączamy maszynę i przystępujemy do uruchomienia i sprawdzenia działania silnika krokowego (ruch maszyny w danym kierunku) z pozycji panelu sterowania.
Narzędzia oraz przyrządy
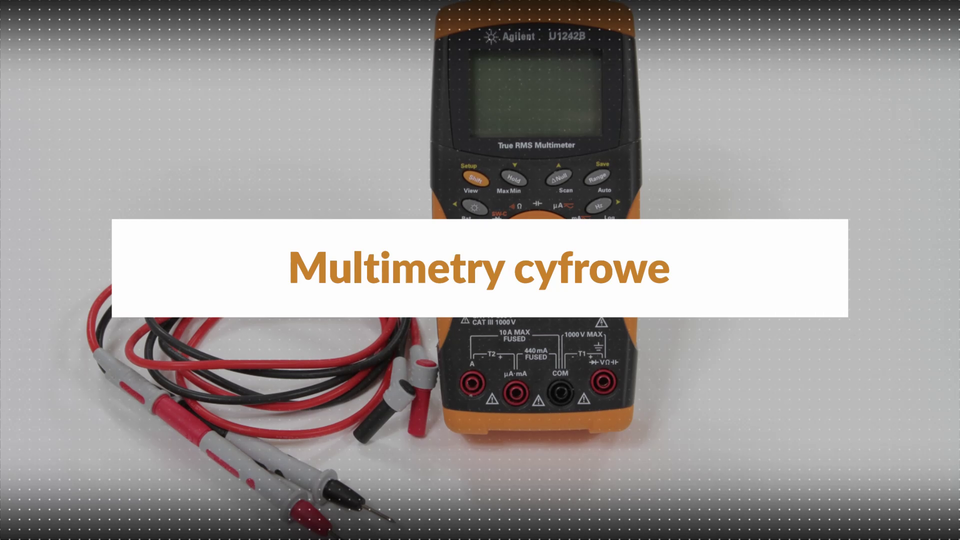
Miernik uniwersalny oraz przewody pomiarowe Miernik uniwersalny (multimetr) umożliwia wykonywanie podstawowych pomiarów elektrycznych i elektronicznych. Zakresy lub poszczególne funkcje wybiera się przy pomocy środkowego pokrętła. W wersji podstawowej takiego przyrządu możemy dokonać następujących pomiarów: pomiar natężenia prądu stałego do pięciu amperów; pomiar napięcia stałego do pięciuset woltów; pomiar napięcia zmiennego do pięciuset woltów; pomiar rezystancji do dwóch tysięcy kilo omów. Dodatkowo miernik przedstawiony na rysunku wyposażony jest w gniazdo przeznaczone do testowania tranzystorów (zakres pomiarowy hFE), zakres pomiarowy do testowania diod z sygnalizacją dźwiękową (buzzer) oraz funkcję automatycznego wykrywania polaryzacji. Zestawienie najważniejszych cech oraz parametrów miernika: pomiar napięcia DC: do 500 wolt (dokładność 1 procent plus 5); pomiar napięcia AC: do 500 wolt (dokładność 2 procent plus 10); pomiar natężenia prądu DC: do 5 amperów dokładność 2 procent plus 10); pomiar rezystancji: do 2000 kilo omów (dokładność 1 procent plus 4); zabezpieczenie w zakresie 5 amperów, temperatura pracy: od 0 stopni Celsjusza do 40 stopni Celsjusza przy wilgotności poniżej 85 procent; częstotliwość próbkowania: 2 razy na sekundę; maksymalny odczyt: 1999; tester diod; tester tranzystorów; funkcja generatora fali prostokątnej; manualny wybór zakresów; automatyczne wykrywanie polaryzacji; wskaźnik niskiego stanu baterii, zasilanie: bateria 9 wolt; wymiary wyświetlacza LCD: 45 na 13 milimetrów; wymiary urządzenia: 124 na 68 na 26 milimetrów; masa: 110 gram. Ilustracja Zdjęcie przedstawia urządzenie w plastikowej obudowie. Na panelu przednim pokrętło oraz wyświetlacz. Obok urządzenia dwa kable elektryczne w kolorach czarnym oraz czerwonym. Podpis zdjęcia: miernik uniwersalny (multimetr) wraz z przewodami pomiarowymi na wtyk bananowy. Filmy Film pod tytułem „Mierniki cyfrowe”
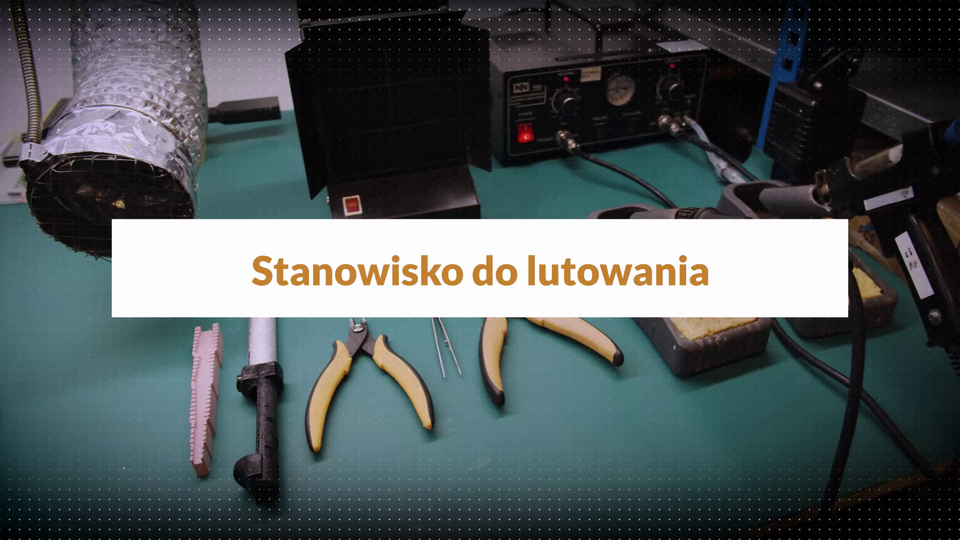
Stacja lutownicza Tekst Stacje lutownicze używane są w serwisach elektronicznych do bezpiecznego lutowania elementów oraz podzespołów elektronicznych. Rodzaje stacji lutowniczych: lutownice o mocy do 50 watów używane są do lutowania obwodów drukowanych, cynowania przewodów oraz drobnych części elektronicznych, np. aparatury pomiarowej; lutownice o mocy od 60 do 100 watów używane są do lutowania większych części elektronicznych; lutownice o mocy od 120 do 250 watów używane są do szybkiego lutowania mniejszych części maszyn, przyrządów elektrotechnicznych oraz ocynowanego drutu o średnim przekroju; lutownice o mocy od 250 do 400 watów używane są do lutowania części okrętowych i samolotowych oraz ocynowanego drutu o dużym przekroju; lutownice o mocy powyżej 400 watów używane są do lutowania zbiorników, armatury oraz bardzo dużych przedmiotów. Ilustracja Urządzenie składa się z jednostki centralnej w obudowie. Na przedniej ścianie obudowy znajdują się przyciski, pokrętła oraz wyświetlacz. Do urządzenia za pomocą przewodów podłączone są dwie końcówki. Większa z nich służy do lutowania na gorące powietrze, a mniejsza to lutownica grotowa. Pod grafiką podpis: Stacja lutownicza o mocy całkowitej 700 W zawierająca lutownicę grotową oraz lutownicę na gorące powietrze (hot air) z niezależnymi obwodami zasilania. Tekst Zestawienie najważniejszych cech oraz parametrów stacji lutowniczej przedstawionej na rysunku. Lutownica grotowa: moc lutownicy 50 watów; regulacja temperatury grota w zakresie od 200 stopni Celsjusza do 400 stopni Celsjusza; stabilność temperatury: plus minus 2 stopnie Celsjusza; tryb czuwania ograniczający zużycie energii elektrycznej; regulacja temperatury za pomocą potencjometru. Lutownica na gorące powietrze: regulacja temperatury gorącego powietrza w zakresie od 100 stopni Celsjusza do 480 stopni Celsjusza; stabilność temperatury: plus minus 1 stopień Celsjusza; wyświetlacz temperatury (LED); przepływ powietrza maksymalnie 120 litrów na minutę; regulacja temperatury przy pomocy przycisków; regulacja mocy nadmuchu za pomocą potencjometru’ rozmiar głowicy wylotu gorącego powietrza: 22 milimetry. Dobór mocy lutownicy uzależniony jest od rodzaju lutowanych elementów. Temperatura grota podczas lutowania elementów elektronicznych lub przewodów powinna wynosić około 320–350 stopni Celsjusza. Osiągnięcie takiej temperatury zapewnia większość lutownic o mniejszej mocy, tj. od 25 do 50 watów. Wiele urządzeń umożliwia regulację temperatury, co pozwala na lutowanie przy zadanych przez użytkownika parametrach. Nie należy jednak zbytnio zaniżać temperatury (np. w obawie o przegrzanie). Prawidłowo wykonane połączenie powstanie w standardowej temperaturze (np. 350 stopni Celsjusza) przy założeniu, że czas podgrzania wynosi 1‑2 sekundy. Dla komponentów o grubszych wyprowadzeniach, jak np. tranzystory, temperaturę można zwiększyć do 370 stopni Celsjusza. Po zakończeniu lutowania należy dokonać kontroli jego jakości, przede wszystkim drobiazgowo sprawdzić, czy: wszystkie przylutowane elementy znajdują się na swoich miejscach zgodnie z projektem, schematem lub zleceniem serwisowym; wszystkie połączenia są trwałe i prawidłowo wykonane; nie widać uszkodzeń przewodów (jeśli były lutowane) oraz poszczególnych elementów. Kontrola jakości powinna wykluczyć takie błędy, jak występowanie zimnego lutu, powstającego na skutek niezastosowania topnika lub niedostatecznego nagrzania zarówno lutu, jak i materiału łączonego. Film pod tytułem „Luty miękkie”
Wkrętaki Tekst Narzędzia stosowane w wielu typach prac, np. przy montażach, naprawach czy regulacjach. Składają się z rękojeści oraz odpowiednio wykonanego grotu, który stanowi element roboczy, służący do wkręcania oraz wykręcania m.in. śrub oraz wkrętów, np. podczas demontażu/montażu obudowy urządzenia. Ilustracja Zdjęcie przedstawia zestaw sześciu narzędzi - wkrętaków. Narzędzia składają się z rękojeści z tworzywa sztucznego, grotów w obudowie izolacyjnej oraz metalowych końcówek o różnych kształtach.
Pęseta Tekst Pęsety ułatwiają precyzyjne prace, np. lutowanie, montaż lub demontaż elementów elektronicznych. Mogą również służyć do odpowiedniego formowania końcówek przewodów. Rysunek przedstawia zestaw pęset o różnych kształtach i rozmiarach wykonanych z materiału antystatycznego ESD (z angielskiego Electrostatic Discharge), pokrytych czarną powłoką o właściwościach antymagnetycznych. Ilustracja Zdjęcie sześciu narzędzi. Każde złożone z dwóch ramion połączonych ze sobą w jednej części. Zakończenia drugich części w różnych kształtach między innymi proste, zakrzywione, ostre. Pod grafiką podpis: Zestaw pęset antystatycznych ESD.
Obcinaczki boczne Tekst Obcinaczki boczne (cęgi boczne, szczypce boczne) mogą być używane do cięcia: kabli elektrycznych, przewodów, drutów, izolacji z gumy lub tworzywa sztucznego. Ostrza cęgów bocznych przeznaczonych do cięcia kabli pozwalają na gładkie i czyste cięcie przewodów. Ich specjalnie zaprojektowane i wyprofilowane ostrza zapewniają cięcie bez deformacji i miażdżenia kabla. Ilustracja Zdjęcie przedstawia obcinaczki boczne. Narzędzie to składa się z dwóch metalowych części, połączonych w podobny sposób jak nożyczki. Rękojeść wykonana jest z tworzywa sztucznego, a metalowa końcówka jest zaostrzona.
Kombinerki Tekst Kombinerki, znane również jako kombinowane szczypce, to wszechstronne narzędzie ręczne, przeznaczone do wielu zastosowań. Składają się z długiego, zwykle metalowego trzpienia, zakończonego dwoma ostrzami, z których jedno jest płaskie, a drugie ma ząbkowane wycięcia. Kombinerki są używane do cięcia drutu, wyginania, chwytania i trzymania przedmiotów. Ostrze płaskie może być stosowane do przecinania drutu, a ząbkowane wycięcia na drugim ostrzu przydają się do chwytania przedmiotów, takich jak nakrętki, śruby czy gwoździe. Dodatkowo na rękojeści kombinerek często jest wbudowany przecinak do izolacji, który umożliwia skrawanie i usuwanie izolacji z przewodów elektrycznych. Ilustracja Zdjęcie przedstawia kombinerki. Narzędzie to składa się z dwóch metalowych części, połączonych w podobny sposób jak nożyczki. Rękojeść wykonana jest z tworzywa sztucznego, a metalowa końcówka nie jest ostra i posiada otwór.
Ściągacz izolacji Tekst Ściągacz izolacji to narzędzie stosowane do precyzyjnego usuwania izolacji z przewodów elektrycznych. Zazwyczaj wyposażone jest w ząbkowaną końcówkę, która umożliwia łatwe obcięcie i zdjęcie izolacji z przewodu, bez ryzyka uszkodzenia przewodu. Ściągacze izolacji są niezwykle przydatne w elektronice, elektrotechnice i innych dziedzinach, w których konieczne jest bezpieczne i precyzyjne odsłanianie elementów przewodów przed dalszymi pracami. Ilustracja Zdjęcie przedstawia ściągacz izolacji. Narzędzie to składa się z dwóch metalowych części, połączonych w podobny sposób jak nożyczki. Rękojeść wykonana jest z tworzywa sztucznego, a metalowa końcówka jest zakończona prosto i umożliwia nacięcie i ściągnięcie izolacji z przewodu.
Powiązane ćwiczenia
10. Silniki krokowe
Test
10. Silniki krokowe
Silniki krokowe203050Brawo! Materiał dotyczący układów napędowych masz opanowany.Niestety, nie udało ci się rozwiązać poprawnie testu. Wróć do atlasu interaktywnego pt. „Naprawa układów napędowych”, a następnie rozwiąż test ponownie.
Test
Silniki krokowe
Liczba pytań:
20
Limit czasu:
30 min
Pozostało prób:
1/1
Twój ostatni wynik:
-
Silniki krokowe
Pytanie
1/20
Pozostało czasu
0:00
Twój ostatni wynik
-
Zaznacz wszystkie prawidłowe odpowiedzi. Urządzenia, w których wykorzystuje się silniki krokowe, to
Zaznacz wszystkie prawidłowe odpowiedzi. Zaletami silników krokowych są
Zaznacz prawidłową odpowiedź. Pobór prądu przez silnik krokowy jest
Zaznacz prawidłową odpowiedź. Wskaż element, który nie występuje w budowie silnika krokowego
Zaznacz prawidłową odpowiedź. Silnik krokowy zasilany jest
Zaznacz, ile kroków potrzeba do pełnego obrotu wału w przypadku silnika o pojedynczym kroku równym obrotowi o kąt 1,8°.
Zaznacz prawidłową odpowiedź. Dla silnika o pojedynczym kroku równym obrotowi o kąt 3,6°, do wykonania pełnego obrotu wału potrzeba 100 kroków, które określa się jako parametr 100, czyli
Zaznacz prawidłową odpowiedź. Stojan silnika krokowego posiada pogrupowane uzwojenia zwane
Zaznacz wszystkie prawidłowe odpowiedzi. Parametr, który może opisywać silnik krokowy, to
Zaznacz prawidłową odpowiedź. Przyjęta nazwa znormalizowanej wielkość silników krokowych, odnosząca się do wymiaru obudowy, to
Zaznacz prawidłową odpowiedź. Parametrem opisującym silnik krokowy nie jest
Zaznacz prawidłową odpowiedź. Odczytałeś z opisu silnika krokowego, że jego rozmiar to NEMA 8. Liczba 8 w opisie oznacza:
Zaznacz wszystkie prawidłowe odpowiedzi. Metoda umożliwiająca rozpoznanie wyprowadzeń danej pary cewek silnika krokowego to
Zaznacz prawidłową odpowiedź. Oznaczenia wyprowadzeń cewek silnika krokowego bipolarnego czteroprzewodowego to
Zaznacz prawidłową odpowiedź. Dodatkowy element montowany do silnika krokowego, umożliwiający szybsze odprowadzenie ciepła na zewnątrz silnika to
Zaznacz prawidłową odpowiedź. W przypadku instalacji silnika krokowego w środowisku, w którym występuje wysokie zapylenie, należy pamiętać o
Zaznacz wszystkie prawidłowe odpowiedzi. Narzędzia i przyrządy pomocne przy naprawie i serwisowaniu układów napędowych z silnikami krokowymi to
Zaznacz prawidłowe odpowiedzi. Trzy najczęstsze przyczyny utraty fazy w silniku krokowym to
Zaznacz prawidłową odpowiedź. W celu wykonania określonego ruchu silniki krokowe muszą być sterowane we właściwej kolejności faz. Nieprawidłowa sekwencja może spowodować
Zaznacz prawidłową odpowiedź. Pojedynczy impuls z układu sterowania podany na uzwojenie silnika krokowego powoduje