Układy pneumatyczne
MEC.03. Montaż i obsługa maszyn i urządzeń - Mechanik- Monter maszyn i urządzeń i Technik mechanik
Elementy wykonawcze
ATLAS INTERAKTYWNY
W układach pneumatycznych do grupy elementów wykonawczych należą siłowniki i silniki pneumatyczne.
Bardzo często są stosowane w napędach maszyn, urządzeń oraz w sterowaniach układami automatyki i procesów technologicznych.
Siłowniki i silniki pneumatyczne są to elementy pneumatyczne zamieniające energię sprężonego powietrza na energię mechaniczną (siłę lub moment obrotowy).
Ze względu na charakter ruchu elementu roboczego (tłoczyska siłownika lub wałka) siłowniki dzieli się na:
siłowniki o ruchu posuwisto zwrotnym tłoczyska,
siłowniki o ruchu obrotowym wałka.
W grupie siłowników o ruchu posuwisto zwrotnym występują następujące ich odmiany:
siłowniki tłokowe,
siłowniki beztłokowe,
siłowniki beztłoczyskowe.
W grupie siłowników o ruchu obrotowym występują następujące odmiany:
siłowniki wahadłowe (realizujące ruch w zakresie ),
siłowniki obrotowe (silniki pneumatyczne).
Ze względu na kierunek wywierania siły przez siłowniki wyróżnia się:
siłowniki jednostronnego działania,
siłowniki dwustronnego działania.
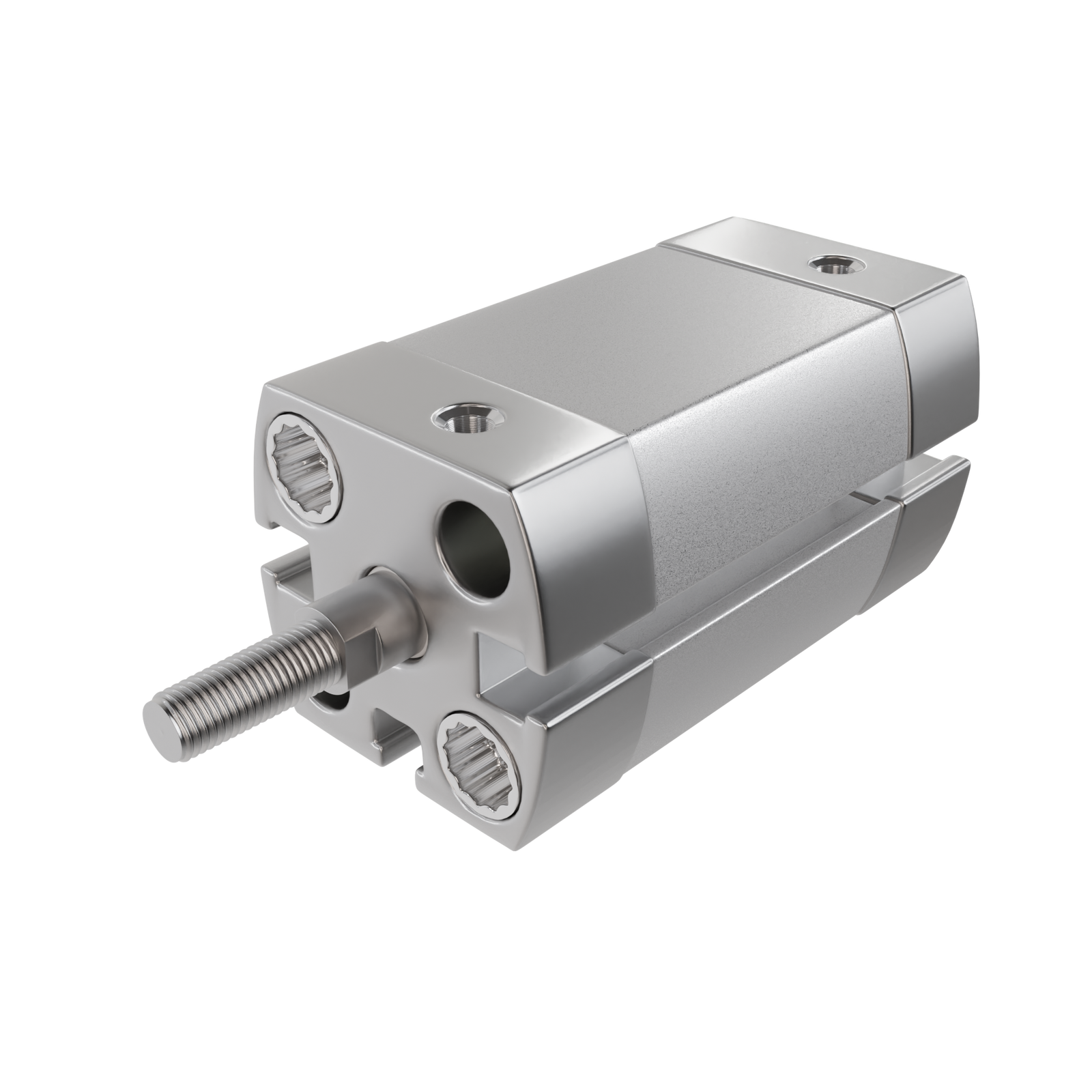
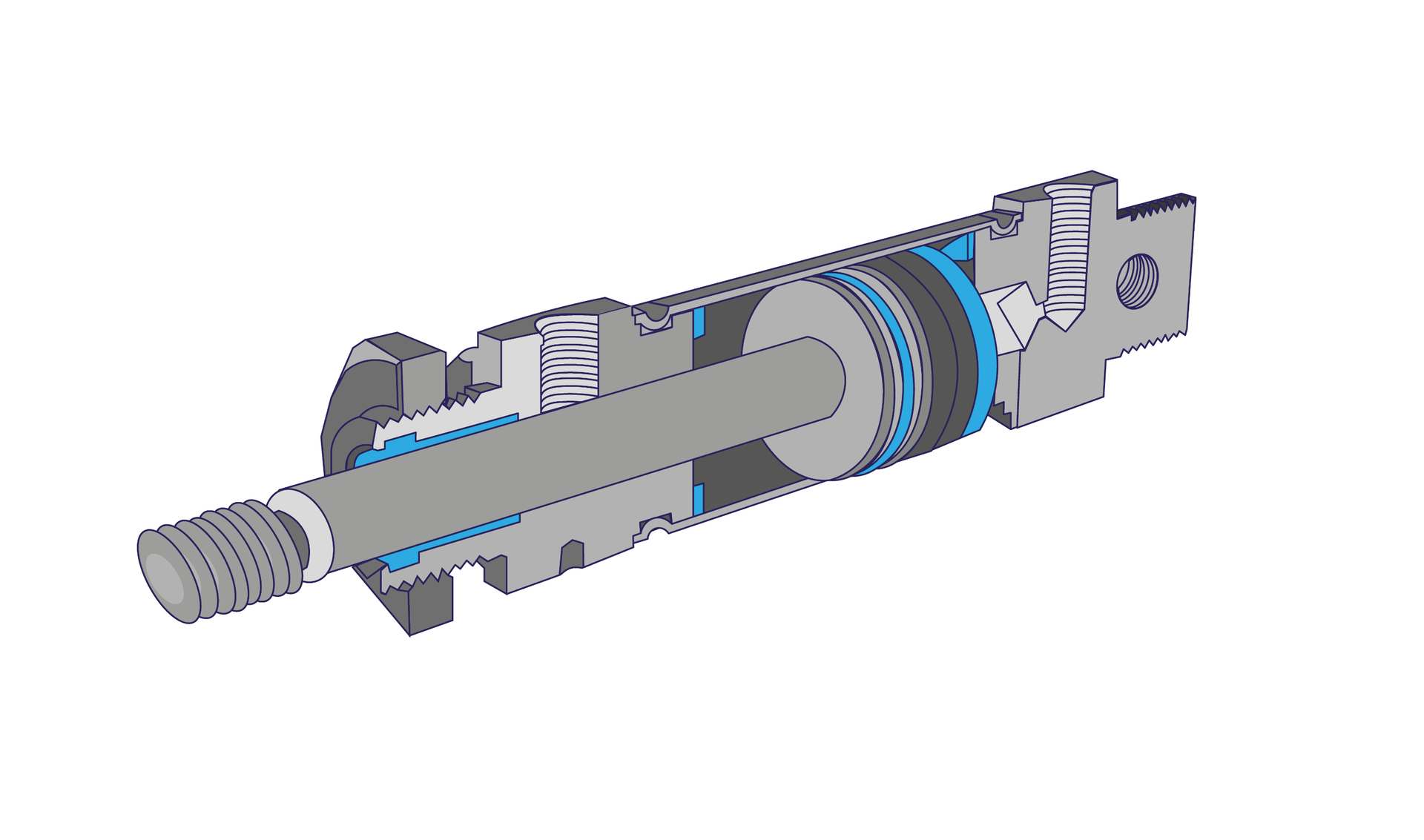
Budowa siłownika
Tuleja siłownika w większości przypadków jest wykonana z rury stalowej ciągnionej bez szwu lub z aluminium, czy mosiądzu.
Na pokrywę tylną i przednią stosuje się przeważnie odlewy (aluminium lub żeliwo ciągliwe). Mocowanie obu pokryw z tuleją siłownika może być rozwiązane przy pomocy ściągów, połączeń gwintowych lub kołnierzowych.
Tłoczysko jest przeważnie wykonywane ze stali ulepszanej cieplnie. Na ogół w celu zmniejszenia niebezpieczeństwa zerwania stosuje się gwinty walcowane. Do tłoczyska przymocowany jest tłok, który jest prowadzony w tulei za pomocą pierścienia , często z wkładką magnetyczną.
W celu uszczelnienia tłoczyska, w pokrywie przedniej wbudowany jest pierścień rowkowany . Prowadzenie tłoczyska odbywa się za pomocą tulei prowadzącej , która może być wykonana ze spieku proszków lub tworzywa sztucznego pokrytego powłoką metalową.
Przed tuleją prowadzącą znajduje się pierścień zgarniający . Zapobiega on przedostawaniu się zanieczyszczeń do komory siłownika. Dlatego też nie jest konieczne stosowanie mieszka sprężystego.
Ze względu na zastosowanie siłowników pneumatycznych w układach automatyki, w których wymagane jest potwierdzenie wykonana cyklu roboczego siłownika stosowane są napędy wyposażone w magnes zabudowany w tłoku. Umożliwia to stosowanie bezstykowych czujników położenia tłoka. Są to elementy wykorzystujące pole magnetyczne do generowania sygnałów elektrycznych stanowiących informacje o stanie obiektu w układach sterowania i regulacji. Stosowane są czujniki kontaktronowe lub elektroniczne (półprzewodnikowe) zamontowane bezpośrednio w tulei kształtowej siłownika lub z wykorzystaniem odpowiednich uchwytów mocujących. Ten rodzaj sygnalizacji nazywany jest bezdotykową sygnalizacją położenia tłoka.
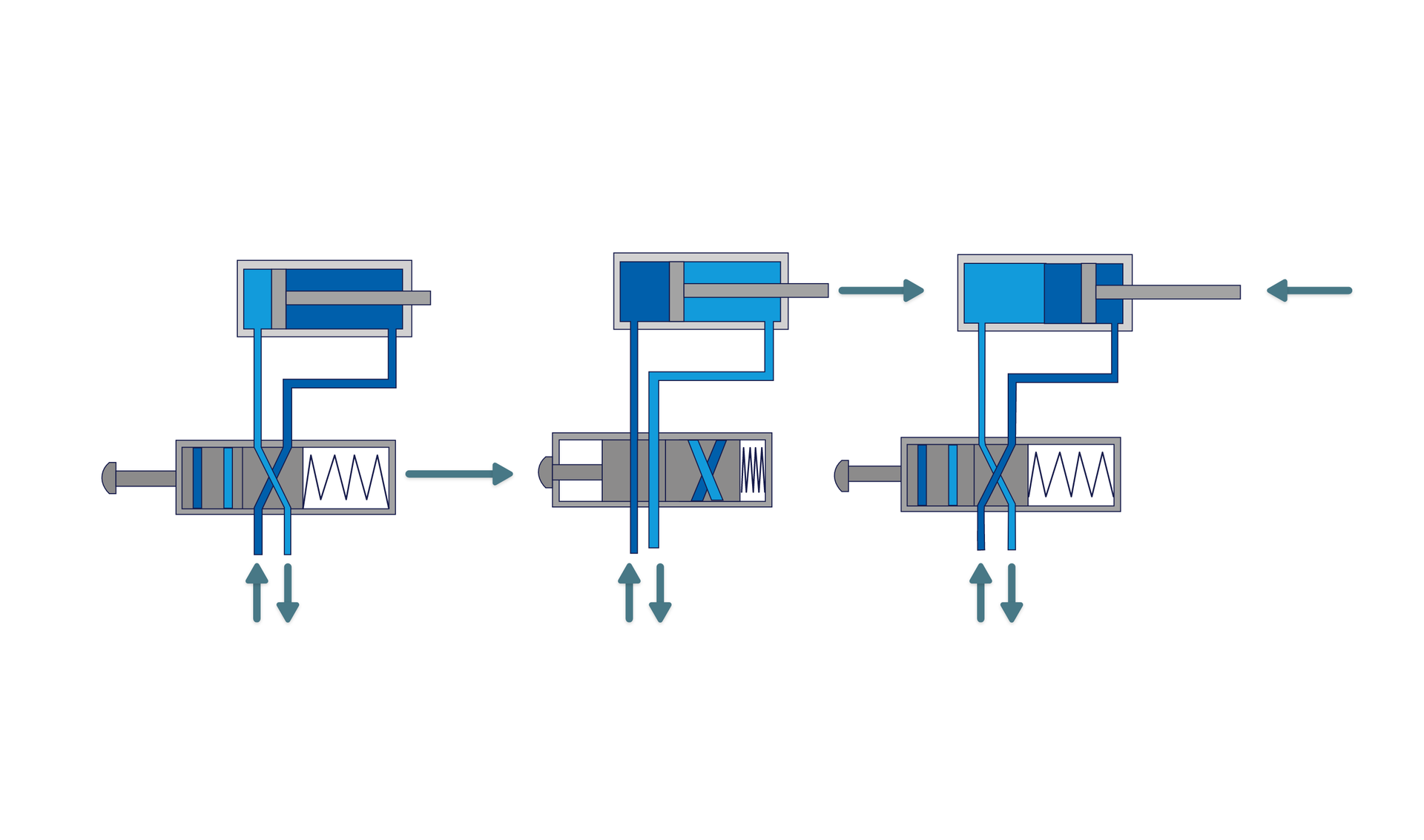
Siłowniki jednostronnego działania
Siłowniki jednostronnego działania wykonują ruch roboczy poprzez podanie ciśnienia do komory roboczej, ruch powrotny siłownika jest wykonywany siłami zewnętrznymi. Siły te pochodzą zwykle od zamontowanych sprężyn. W siłownikach jednostronnego działania ruch powrotny może wywoływać także siła pochodząca od ciężaru zamontowanego obciążenia. Sterowane są zaworami rozdzielającymi .
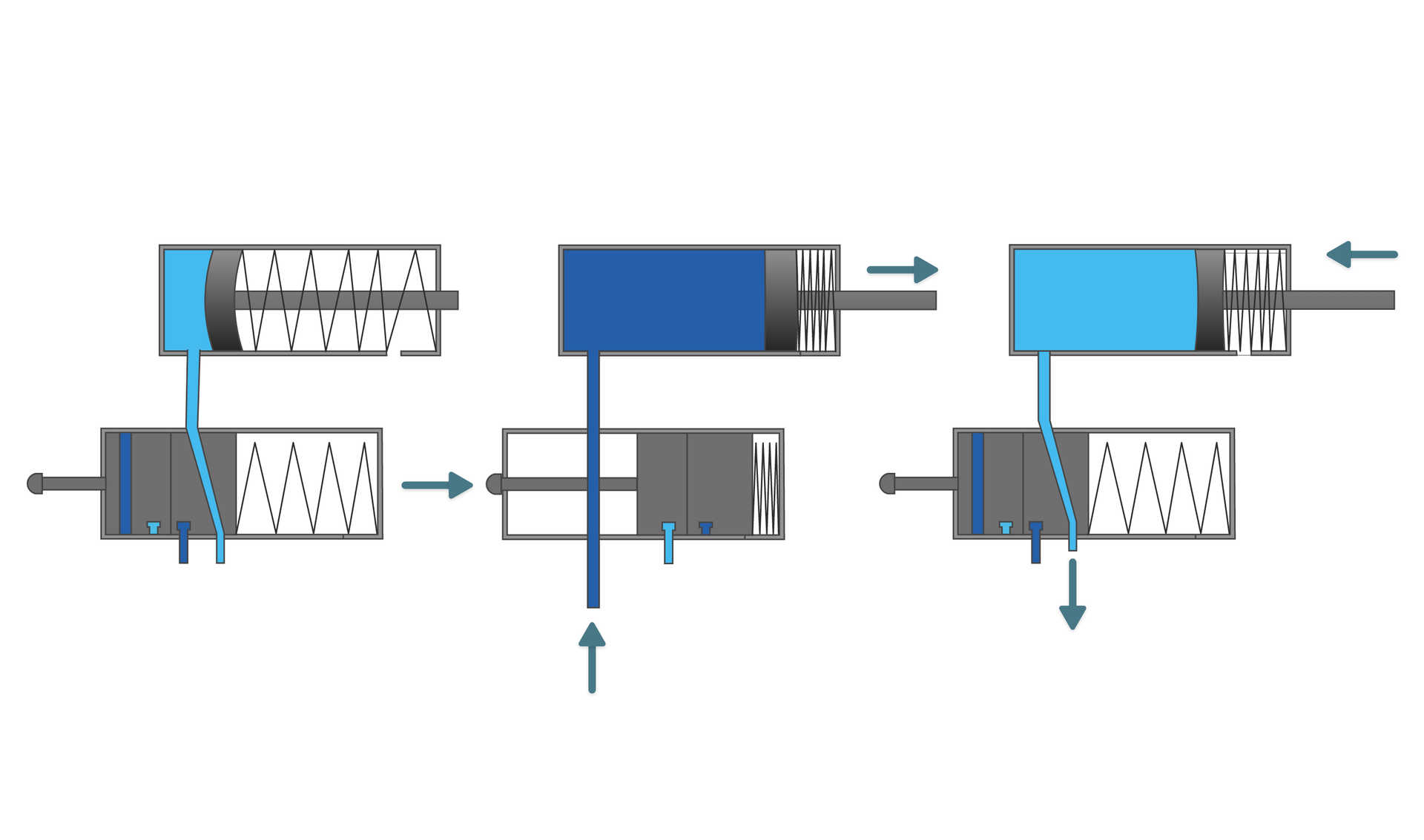
W praktyce znajdują zastosowanie siłowniki jednostronnego działania o działaniu:
pchającym,
ciągnącym.
RgnpXoAwUzPjY 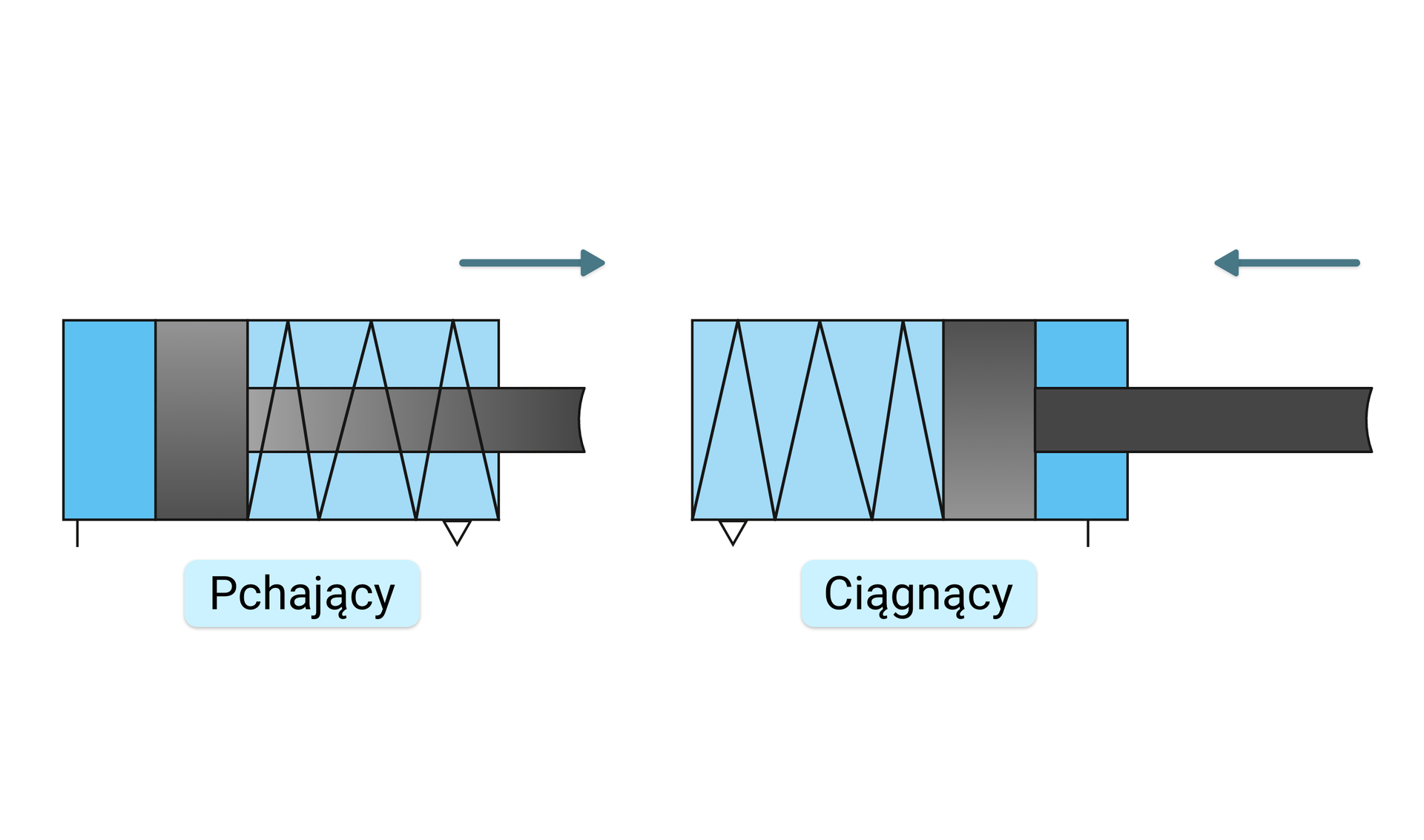 Odmiany siłowników jednostronnego działaniaŹródło: Englishsquare.pl Sp. z o.o., licencja: CC BY-SA 3.0.
Odmiany siłowników jednostronnego działaniaŹródło: Englishsquare.pl Sp. z o.o., licencja: CC BY-SA 3.0.
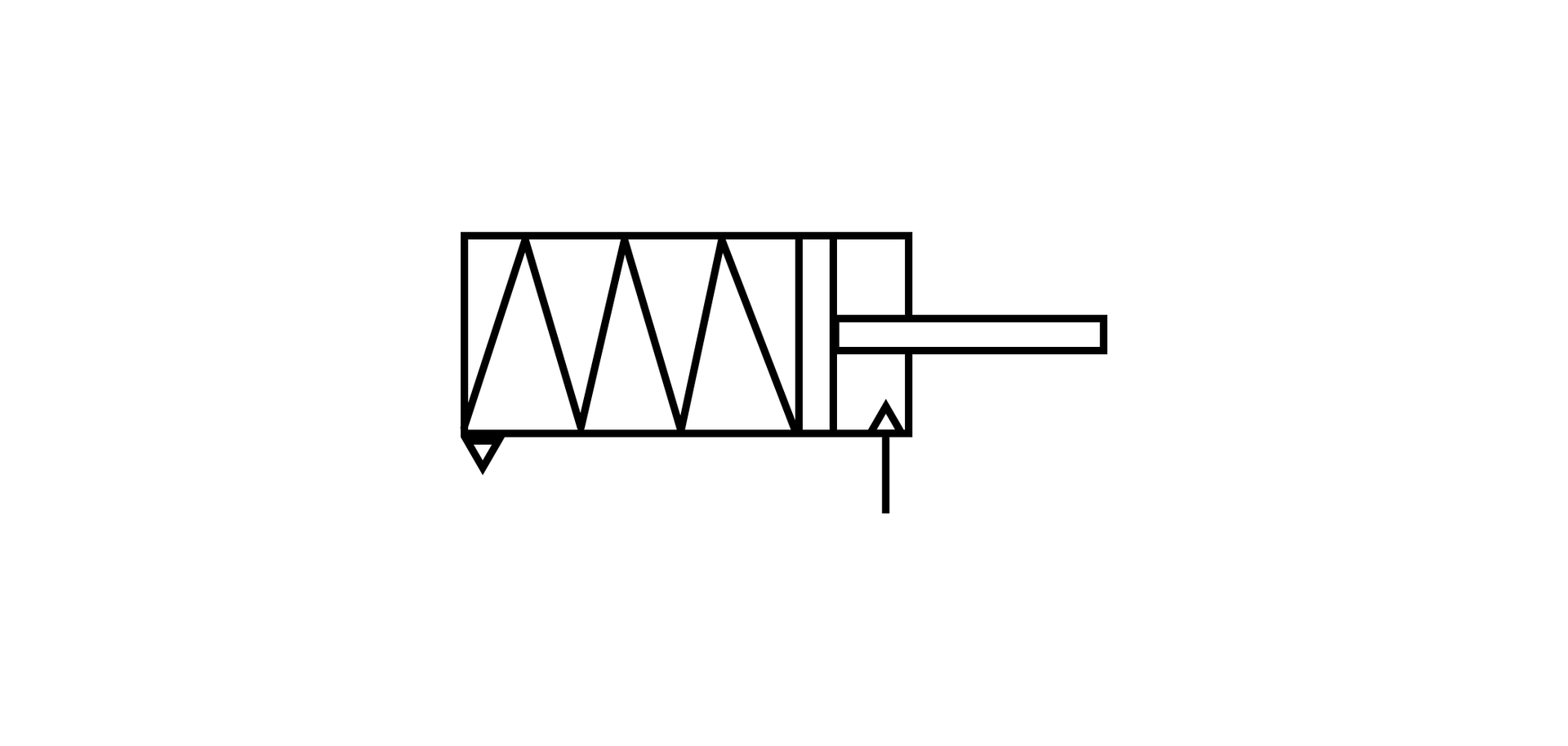
Siłowniki tłokowe jednostronnego działania pchające
Sprężone powietrze jest wprowadzane od strony pokrywy tylnej, co powoduje wysuwanie tłoczyska i ugięcie sprężyny powrotnej. Po odłączeniu siłownika od źródła sprężonego powietrza następuje, dzięki sprężynie powrotnej, ruch powrotny tłoka i tłoczyska.
Symbol graficzny | Objaśnienie symbolu |
|---|---|
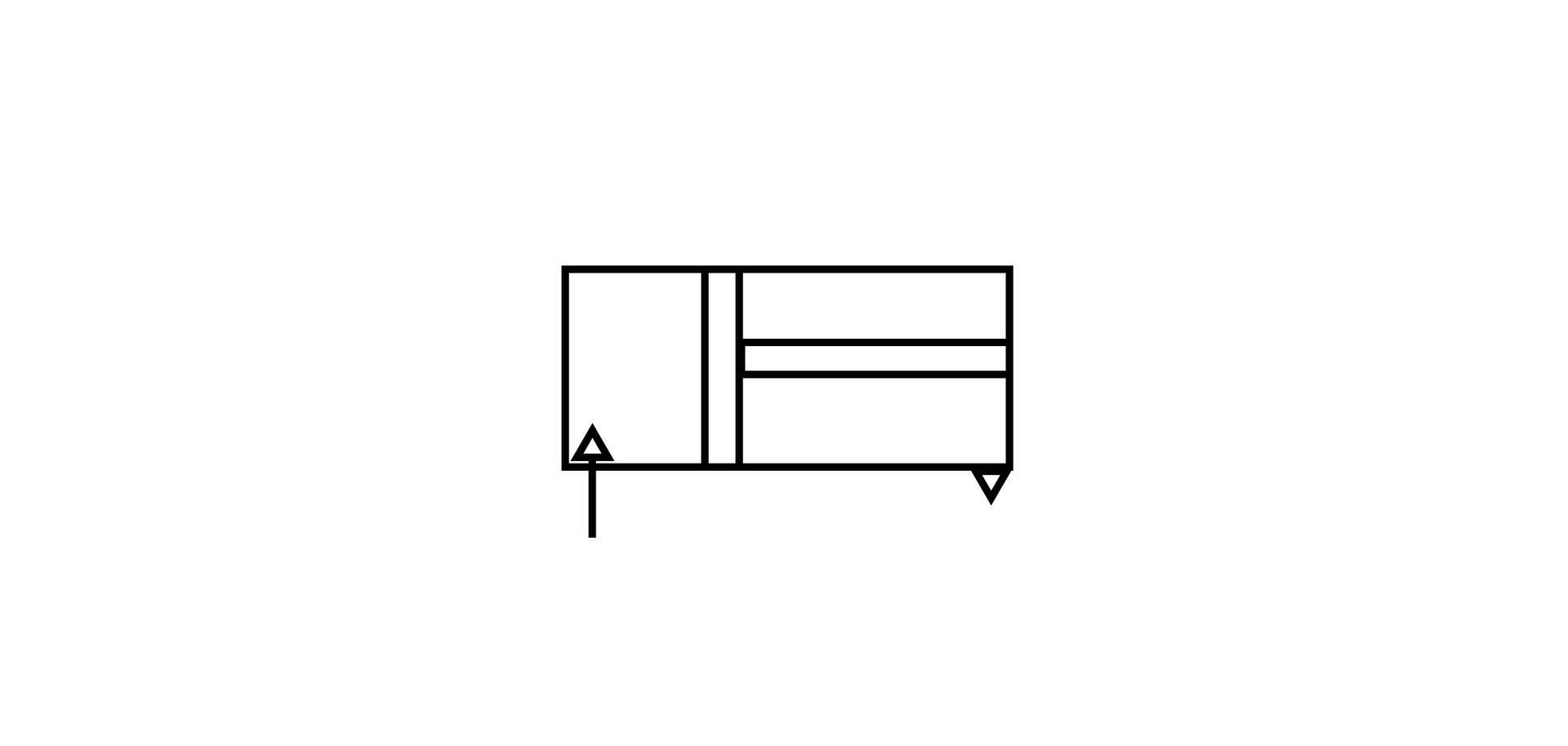 | Symbol siłownika pneumatycznego jednostronnego działania pchającego |
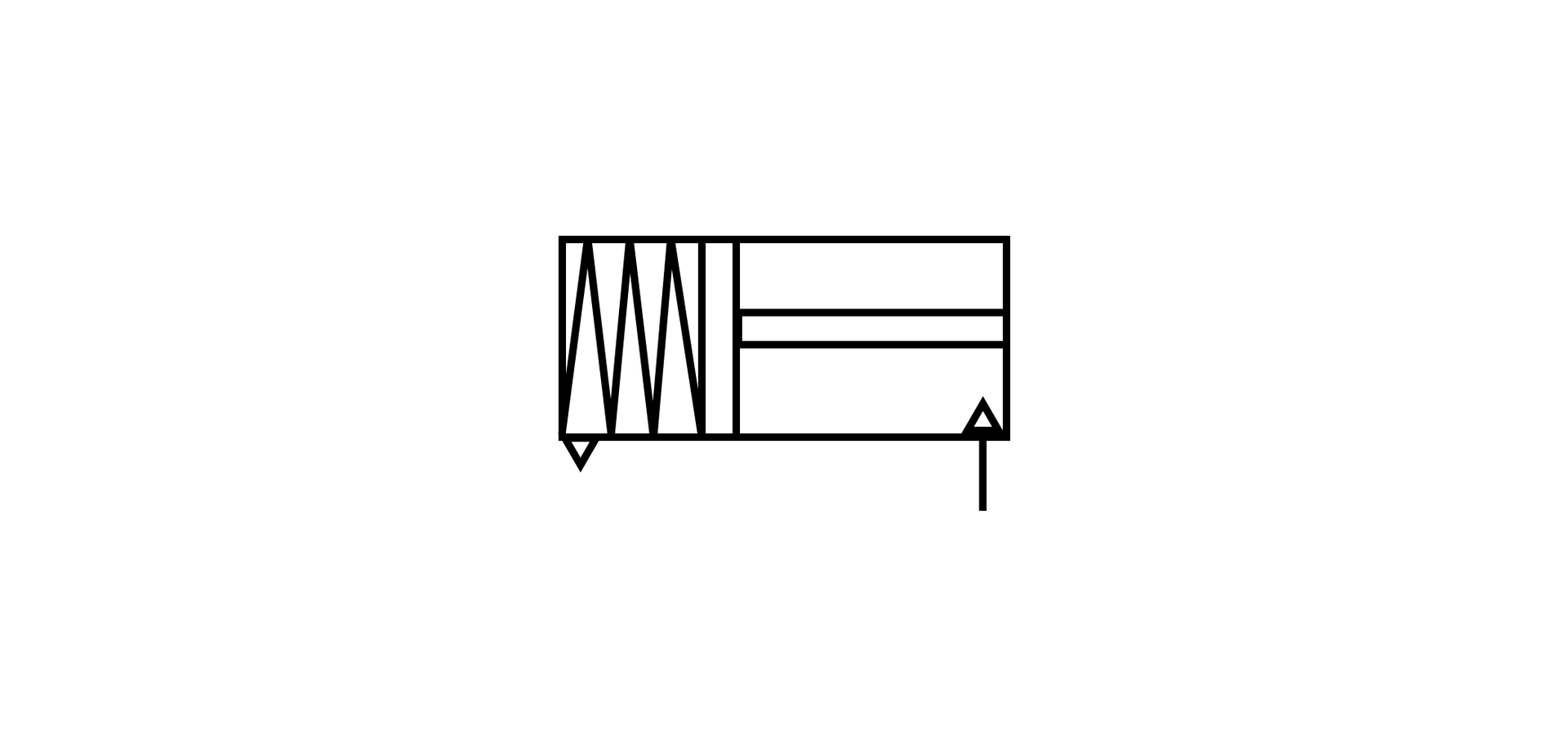 | Symbol siłownika pneumatycznego jednostronnego działania pchającego ze sprężyną |
Siłowniki tłokowe jednostronnego działania ciągnące
Sprężone powietrze jest wprowadzane od strony pokrywy przedniej, powodując wciąganie tłoczyska do wnętrza cylindra. Tłoczysko tego siłownika jest zawsze wysunięte, jeżeli nie podawane jest powietrze.

Symbol graficzny | Objaśnienie symbolu |
|---|---|
 | Symbol siłownika pneumatycznego jednostronnego działania ciągnącego |
Siłowniki teleskopowe jednostronnego działania
Siłownik teleskopowy składa się z kilku siłowników, które są zagnieżdżone jeden w drugi. Siłowniki te charakteryzują się tym, iż maja znacznie większą średnicę, a stosowane są tam gdzie wymagany jest duży skok siłownika przy mniejszej ogólnej długości siłownika. W pneumatyce są jednak bardzo rzadko stosowane.
Symbol graficzny | Objaśnienie symbolu |
|---|---|
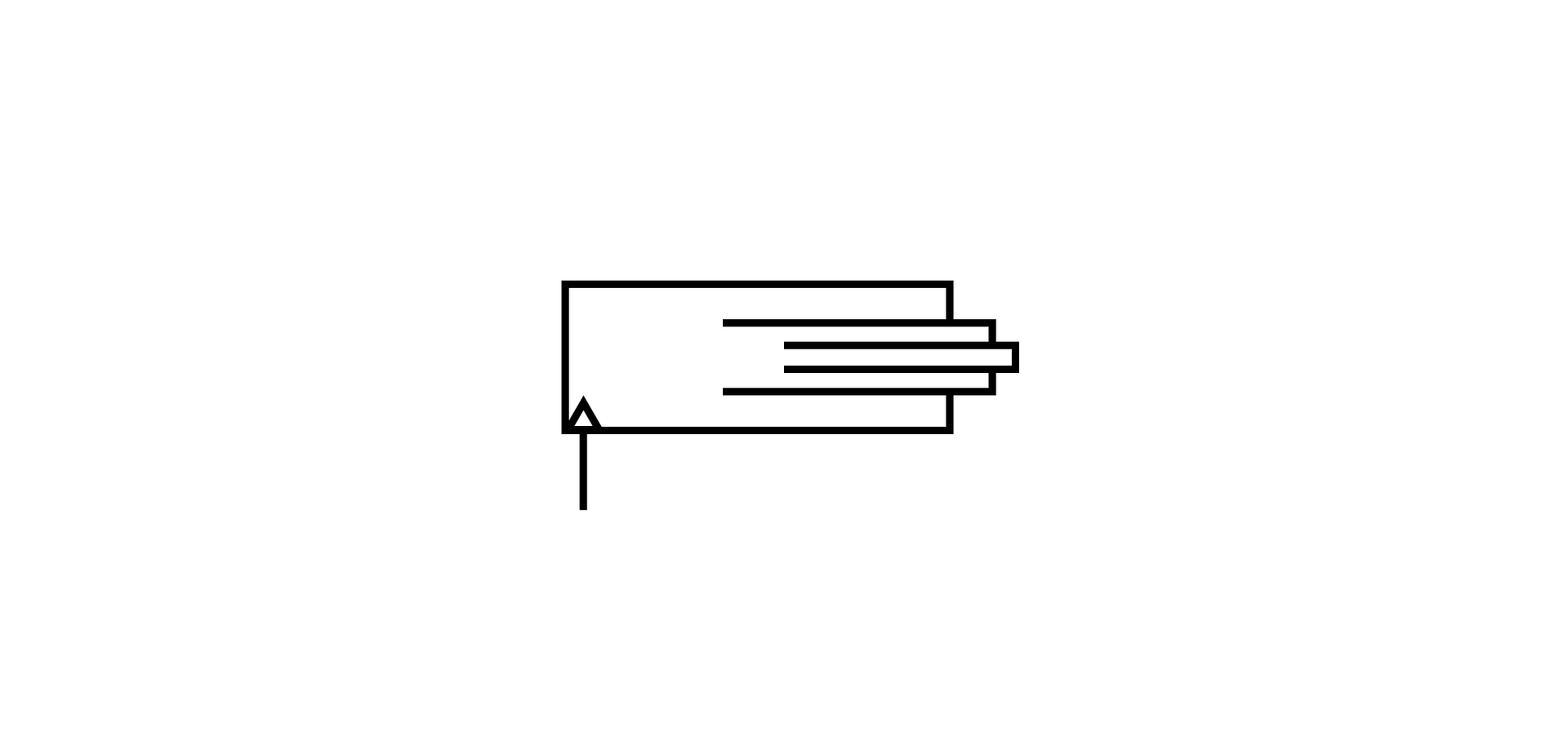 | Symbol siłownika pneumatycznego teleskopowego jednostronnego działania |
Siłowniki nurnikowe
Jest to siłownik jednostronnego działania, w którym tłoczysko jest jednocześnie tłokiem (ma taką samą średnicę). Masywna budowa nurnika zapewnia dużą sztywność i wytrzymałość. Konieczność stosowania ogranicznika ruchu nurnika (aby nie wysunął się z cylindra).
Symbol graficzny | Objaśnienie symbolu |
|---|---|
 | Symbol siłownika pneumatycznego nurnikowego jednostronnego działania |
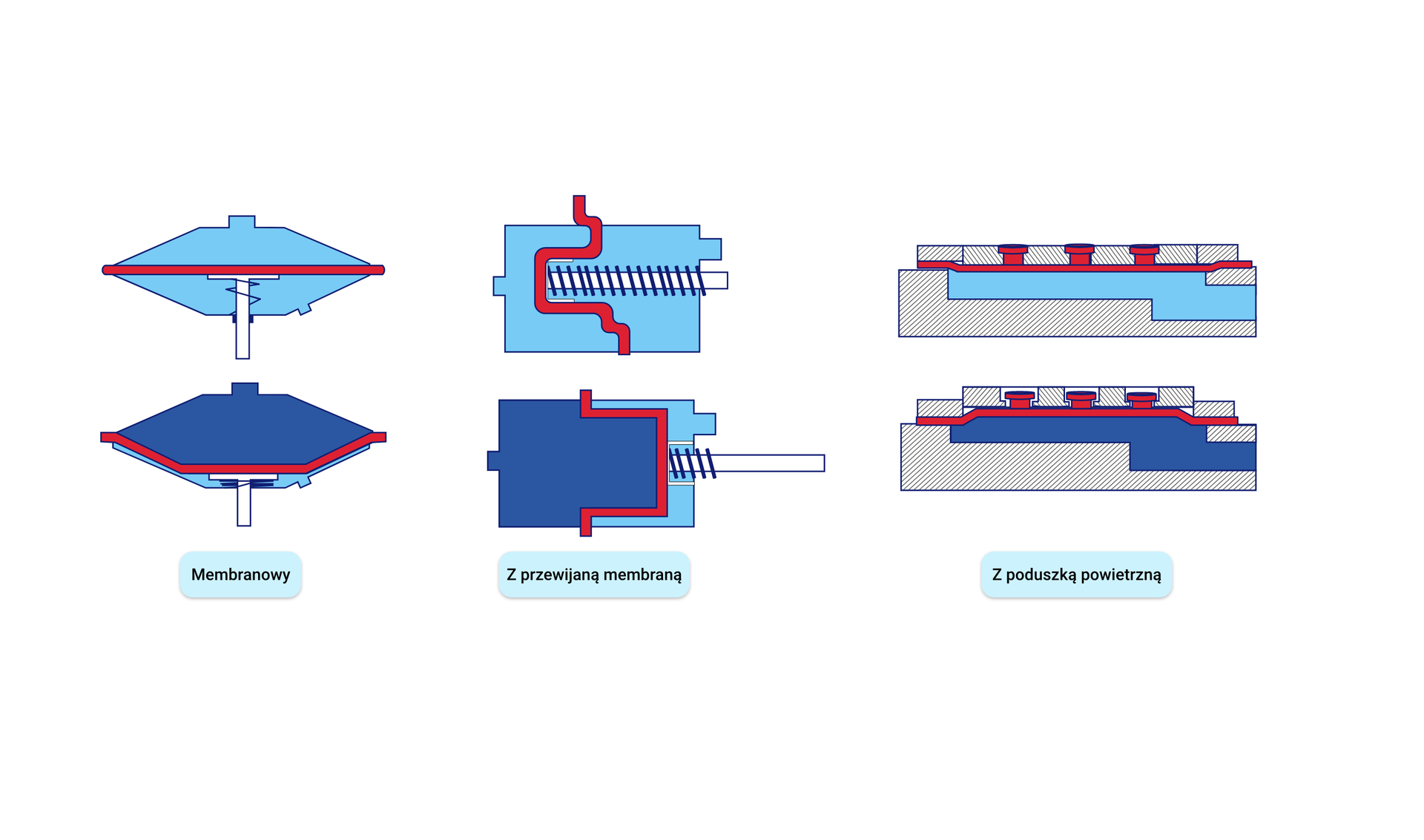
Siłowniki beztłokowe membranowe
W siłownikach membranowych sprężone powietrze odkształca membranę. Droga odkształcenia stanowi skok tłoczyska. Ruch powrotny dokonuje się dzięki sprężystości membrany, pod wpływem oddziaływania sił zewnętrznych lub sprężyny powrotnej. Siłowniki membranowe są siłownikami jednostronnego działania i mogą mieć też dwie odmiany – pchającą i ciągnącą.
Długość siłowników membranowych osiąga wartość do , a w przypadku siłowników z membraną przewijaną do . Siłowniki membranowe są praktycznie urządzeniami bezobsługowymi. Są wykorzystywane np. w urządzeniach mocujących, do tłoczenia i nitowania.
Symbol graficzny | Objaśnienie symbolu |
|---|---|
 | Symbol siłownika pneumatycznego beztłokowego membranowego |
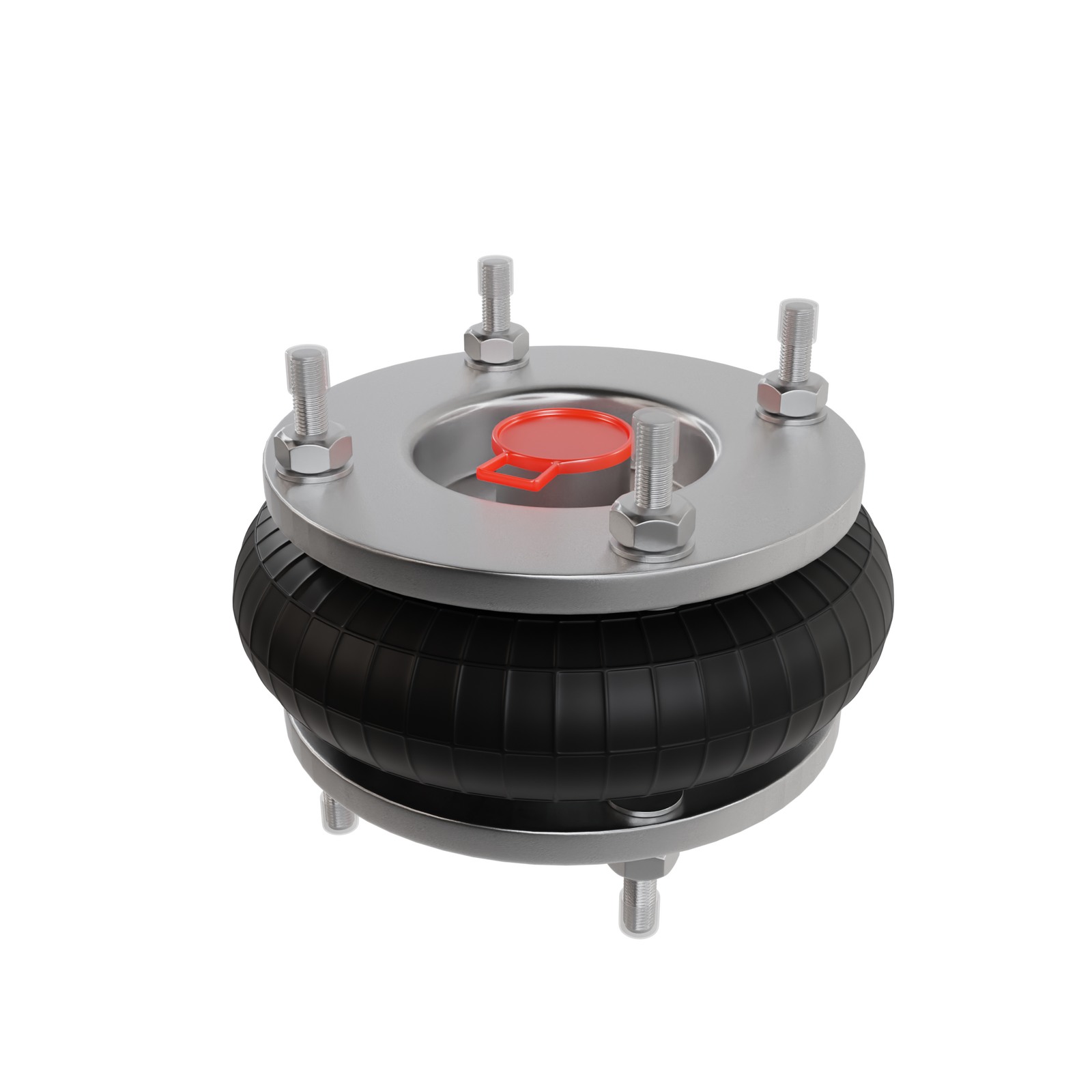
Siłowniki beztłokowe mieszkowe
Należą do siłowników jednostronnego działania. Siłownik składa się z falistego korpusu (płaszcza) wykonanego z gumowanej tkaniny oraz wzmacniających pierścieni stalowych. Korpus jest uszczelniony metalowymi kołnierzami, a jeden z kołnierzy posiada port wlotowy.
Sprężone powietrze powoduje odkształcenie elastycznego płaszcza, a powrót do pozycji początkowej uzyskuje się po spuszczeniu powietrza przez nacisk wywierany na element.


Symbol graficzny | Objaśnienie symbolu |
|---|---|
 | Symbol siłownika pneumatycznego beztłokowego mieszkowego |
Muskuł pneumatyczny
Składa się z elastycznego korpusu, który pęcznieje zmniejszając swoją długość w wyniku wzrostu w jego wnętrzu ciśnienia. Gdy zmniejsza się jego długość może wytworzyć siłę ciągnącą kilkakrotnie większą od siłownika tłokowego o tej samej średnicy. Stosowany w miejscach narażonych na zanieczyszczenia i zapylenia, np. tartakach i kopalniach.

Symbol graficzny | Objaśnienie symbolu |
|---|---|
 | Symbol siłownika muskułu pneumatycznego |
Siłowniki dwustronnego działania tłokowe
W siłowniku dwustronnego działania komory po obu stronach tłoka zasilane są na zmianę sprężonym powietrzem. Dzięki temu siłownik może wykonywać ruchy robocze w obu kierunkach. Sterowane są rozdzielaczami , lub .
Symbol graficzny | Objaśnienie symbolu |
|---|---|
 | Symbol najprostszego siłownika pneumatycznego dwustronnego działania |
Siłowniki tłokowe z amortyzacją w krańcowych położeniach
Jeżeli siłownik porusza większe masy, wtedy stosuje się amortyzację (ruchu tłoka) w skrajnych położeniach, w celu uniknięcia mocnych uderzeń i uszkodzeń siłownika. Przed osiągnięciem skrajnego położenia tuleja amortyzująca odcina swobodny wypływ powietrza do atmosfery. Wypływ może wówczas odbywać się tylko przez bardzo mały otwór, często regulowany przez dławik. Podczas ostatniej fazy skoku prędkość ruchu tłoka zostaje coraz bardziej zmniejszana.
Amortyzacja siłownika:
zabezpiecza przed uszkodzeniem spowodowanym uderzeniami tłoka o pokrywy siłownika,
pozwala szybko przemieszczać i łagodnie ustawiać wrażliwe bądź delikatne elementy,
redukuje wibracje oraz obciążenia dynamiczne.
Symbol graficzny | Objaśnienie symbolu |
|---|---|
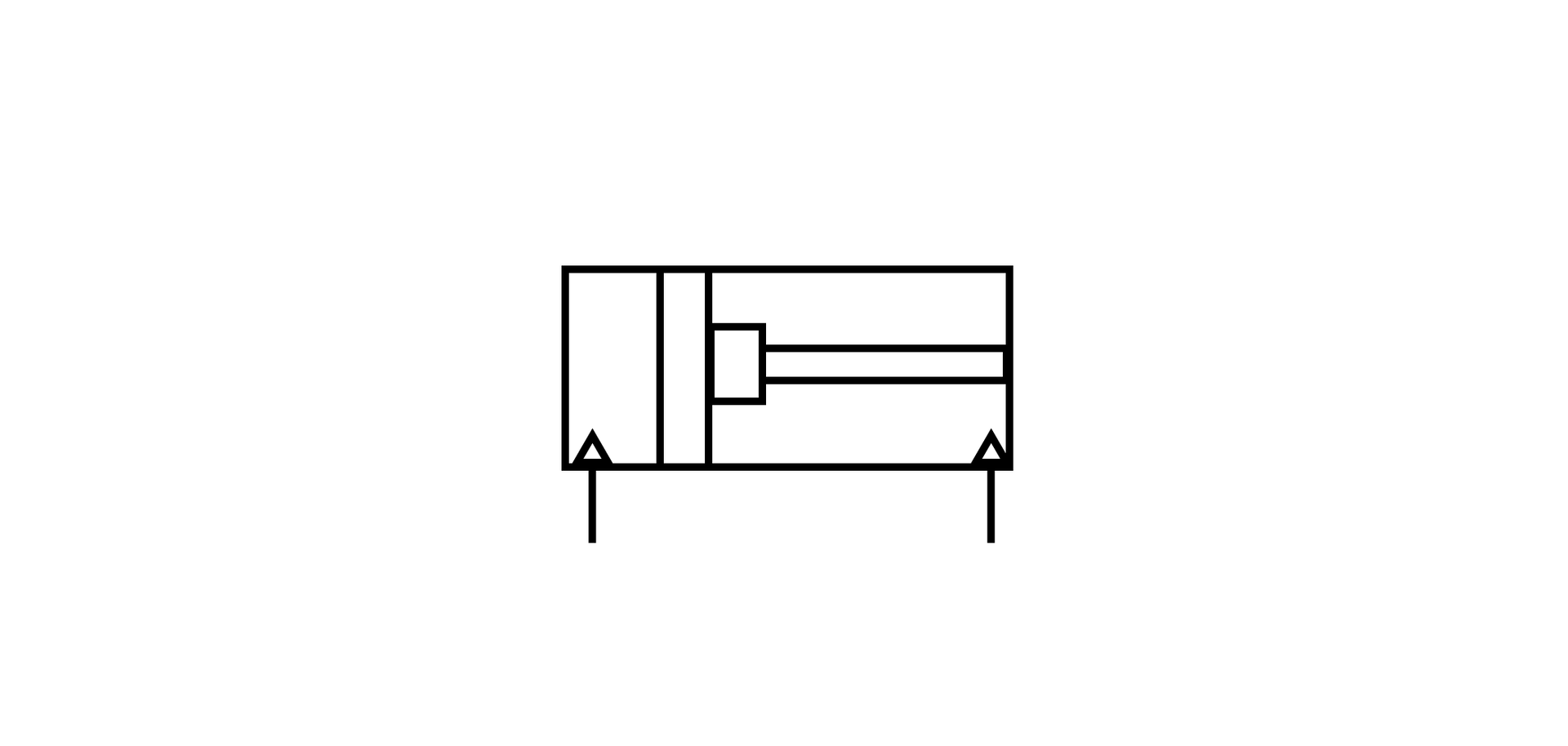 | Symbol siłownika pneumatycznego dwustronnego działania z amortyzacją w jednym kierunku |
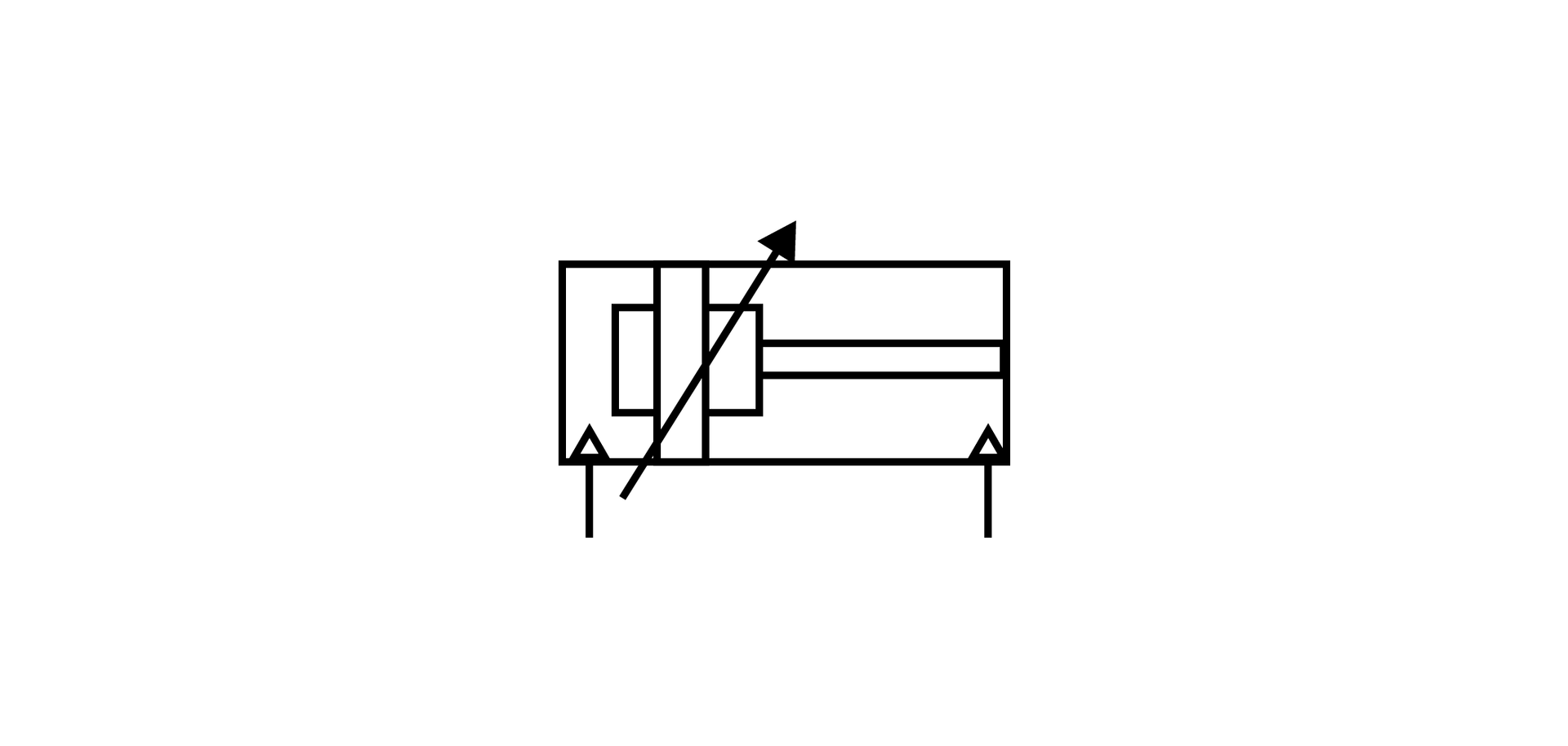 | Symbol siłownika pneumatycznego dwustronnego działania z nastawialną amortyzacją w obu kierunku |
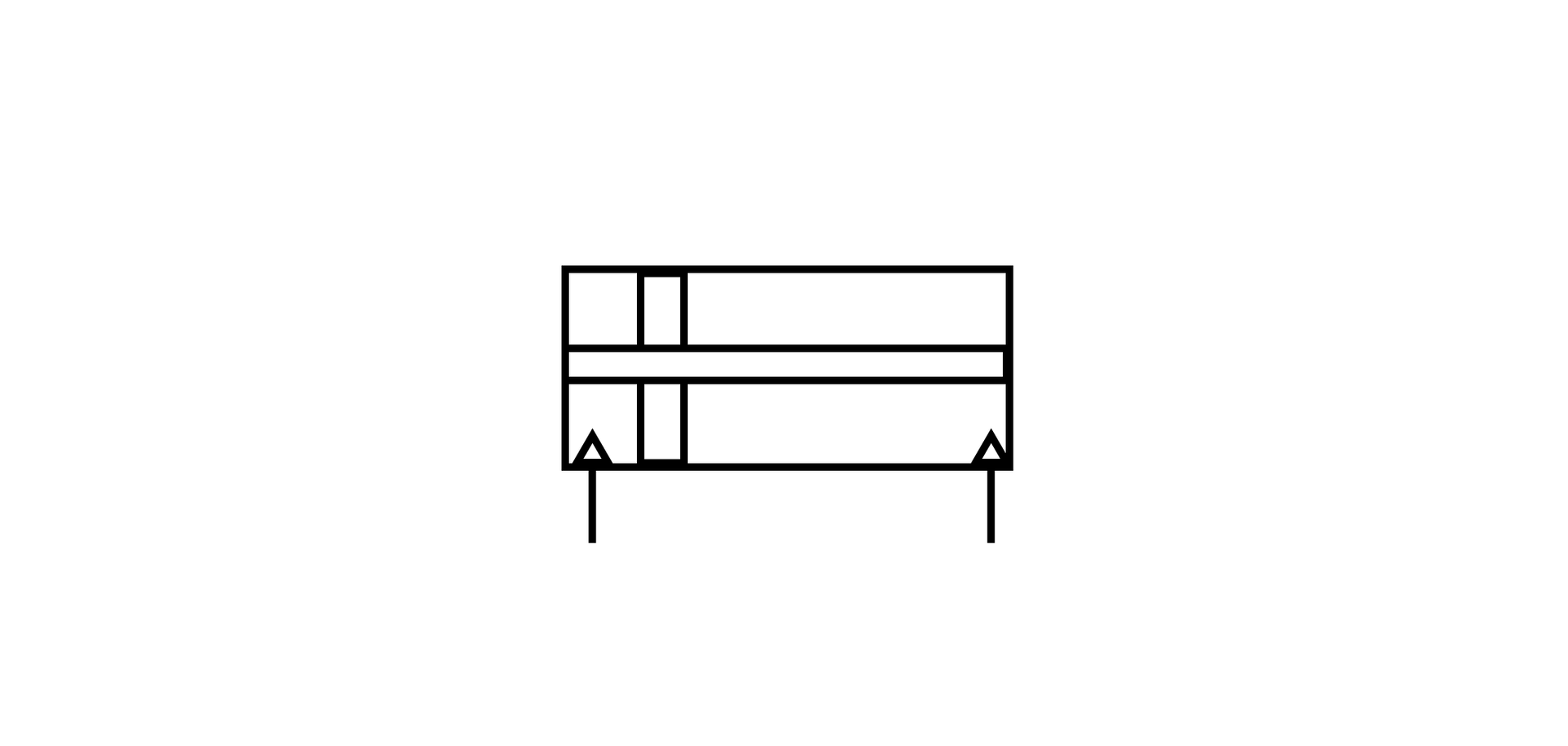
Siłowniki tłokowe dwustronnego działania z obustronnym tłoczyskiem
Jest to siłownik, który posiada tłoczysko z obu stron tłoka. Tłoczysko przechodzi przez obie pokrywy siłownika, co zapewnia lepsze jego prowadzenie. Istnieją wtedy dwie możliwości umieszczenia obciążenia z obu stron siłownika. Nieobciążona strona tłoczyska może być wykorzystana do sterowania urządzeniami sygnalizacyjnymi. Siła odpowiadająca obu kierunkom ruchu jest jednakowa (równe powierzchnie robocze tłoka).
Symbol graficzny | Objaśnienie symbolu |
|---|---|
 | Symbol siłownika pneumatycznego dwustronnego działania z obustronnym tłoczyskiem i z nastawialną amortyzacją w obu kierunkach |
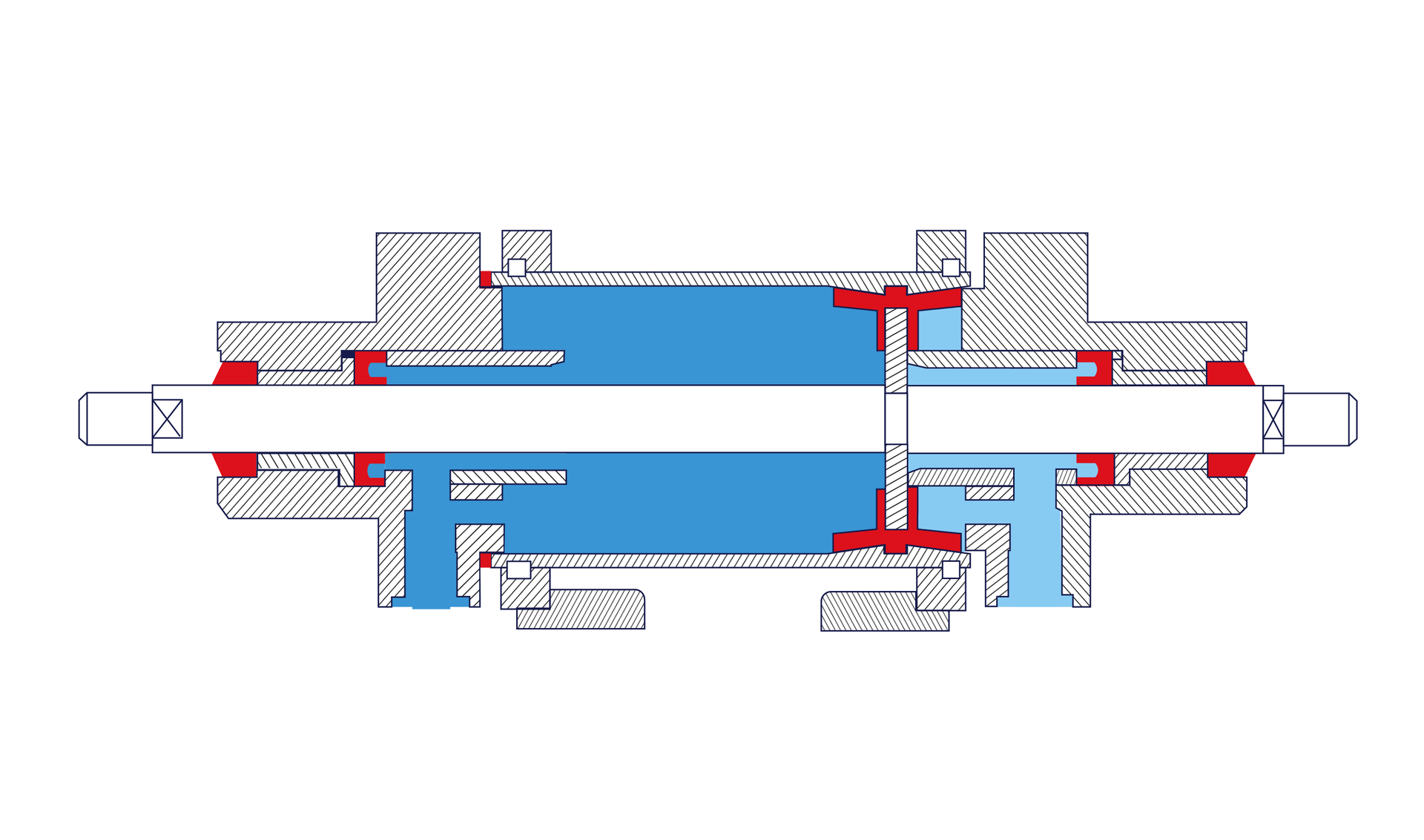
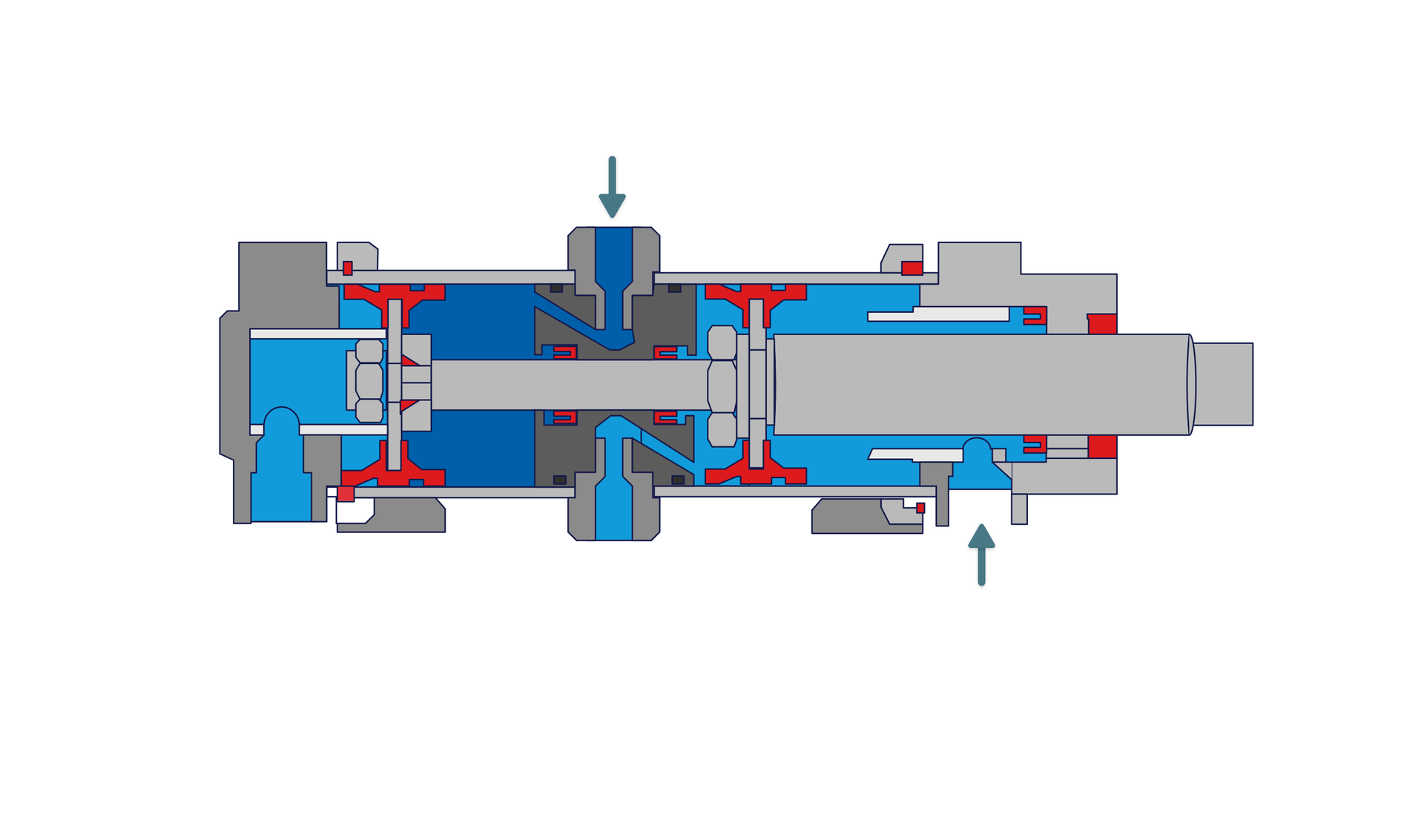
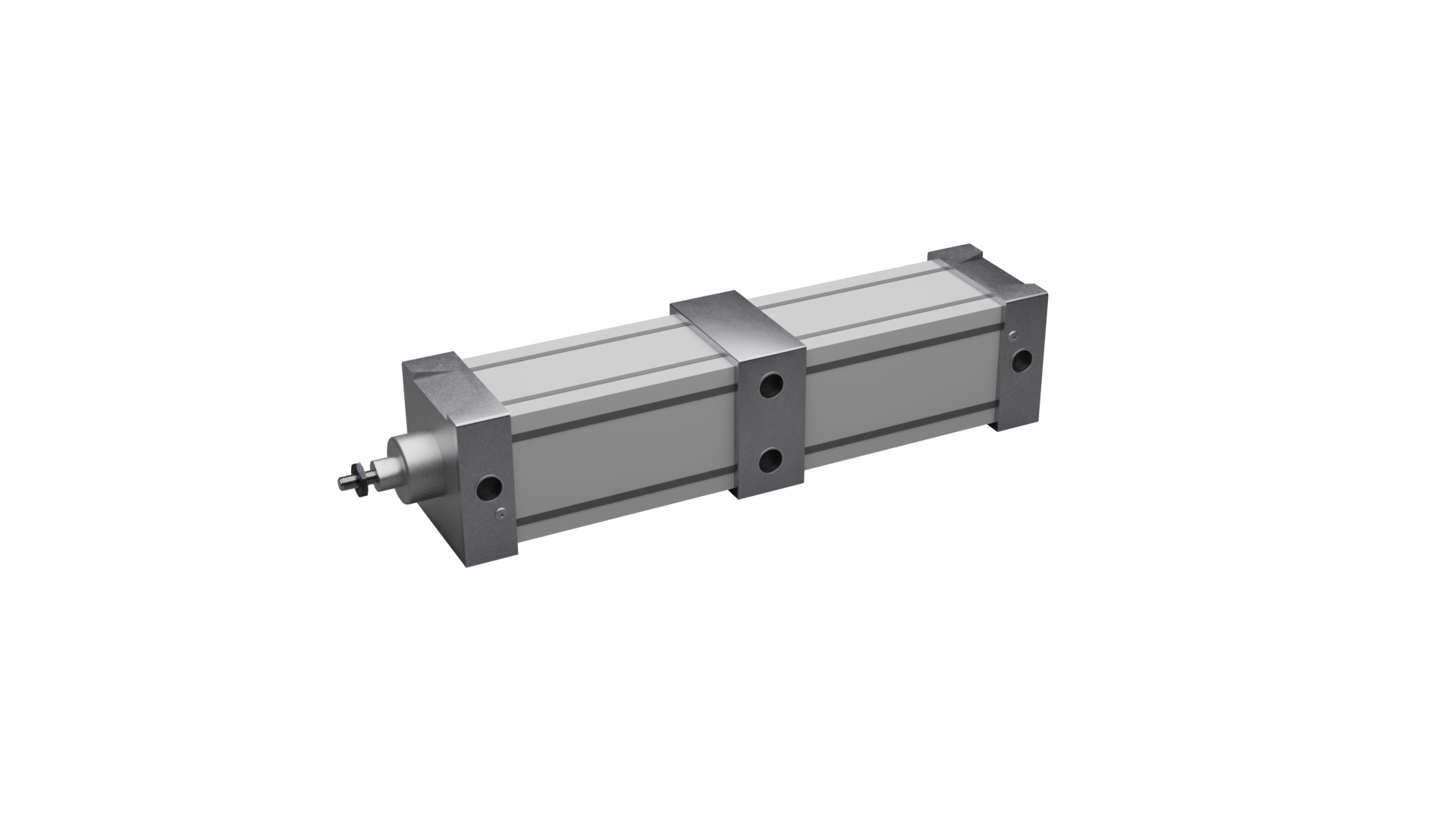
Siłowniki tłokowe dwustronnego działania typu tandem
Ta konstrukcja składa się z dwóch siłowników dwustronnego działania tworzących jeden zespół. Dzięki takiemu rozwiązaniu przy równoczesnym zasilaniu obu tłoków niemal podwaja się siła uzyskiwana na tłoczysku. Ten rodzaj siłowników stosuje się w tych przypadkach, gdy konieczna jest duża siła, a względy konstrukcyjne nie pozwalają na zwiększenie średnicy siłownika.
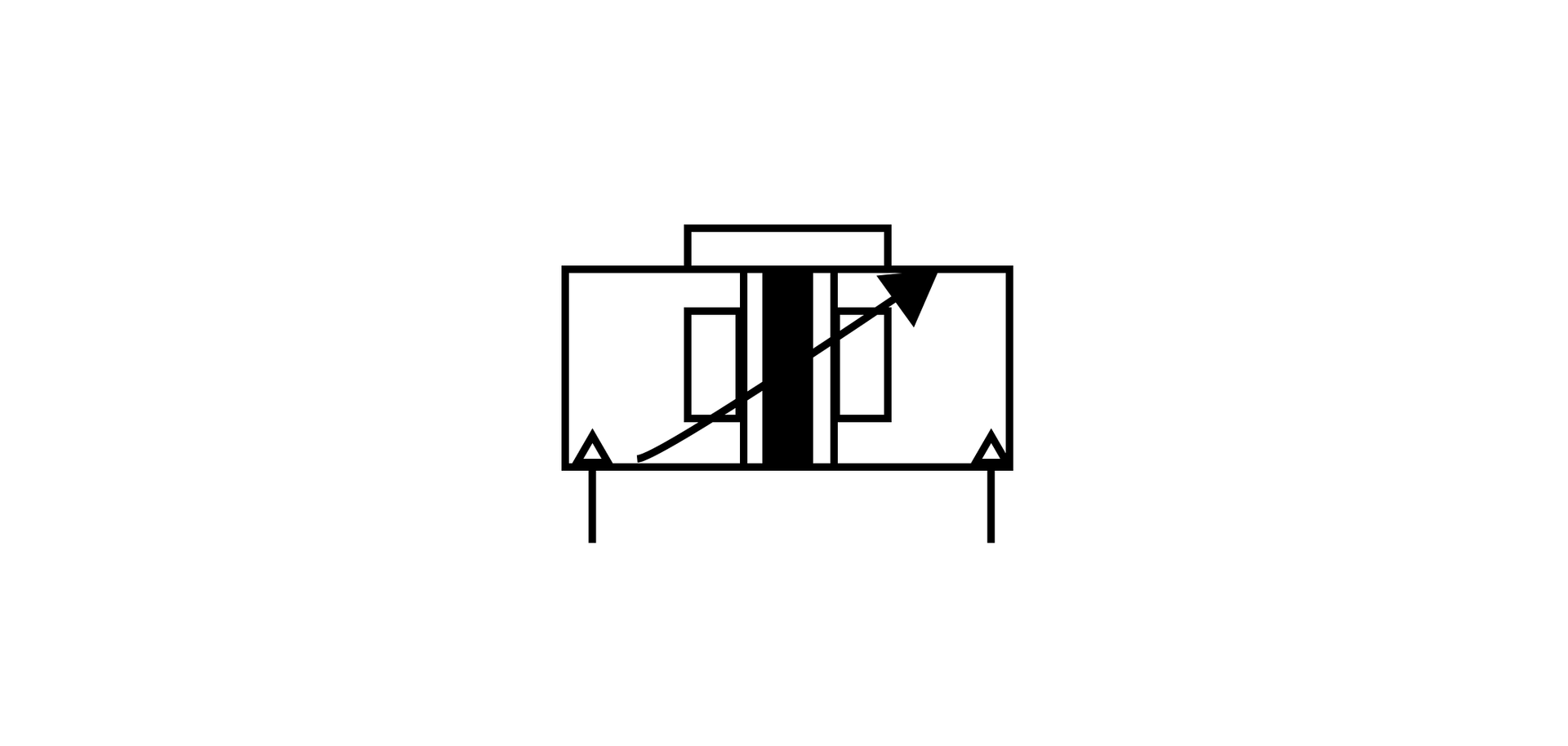
Symbol graficzny | Objaśnienie symbolu |
|---|---|
 | Symbol siłownika pneumatycznego dwustronnego działania typu tandem |
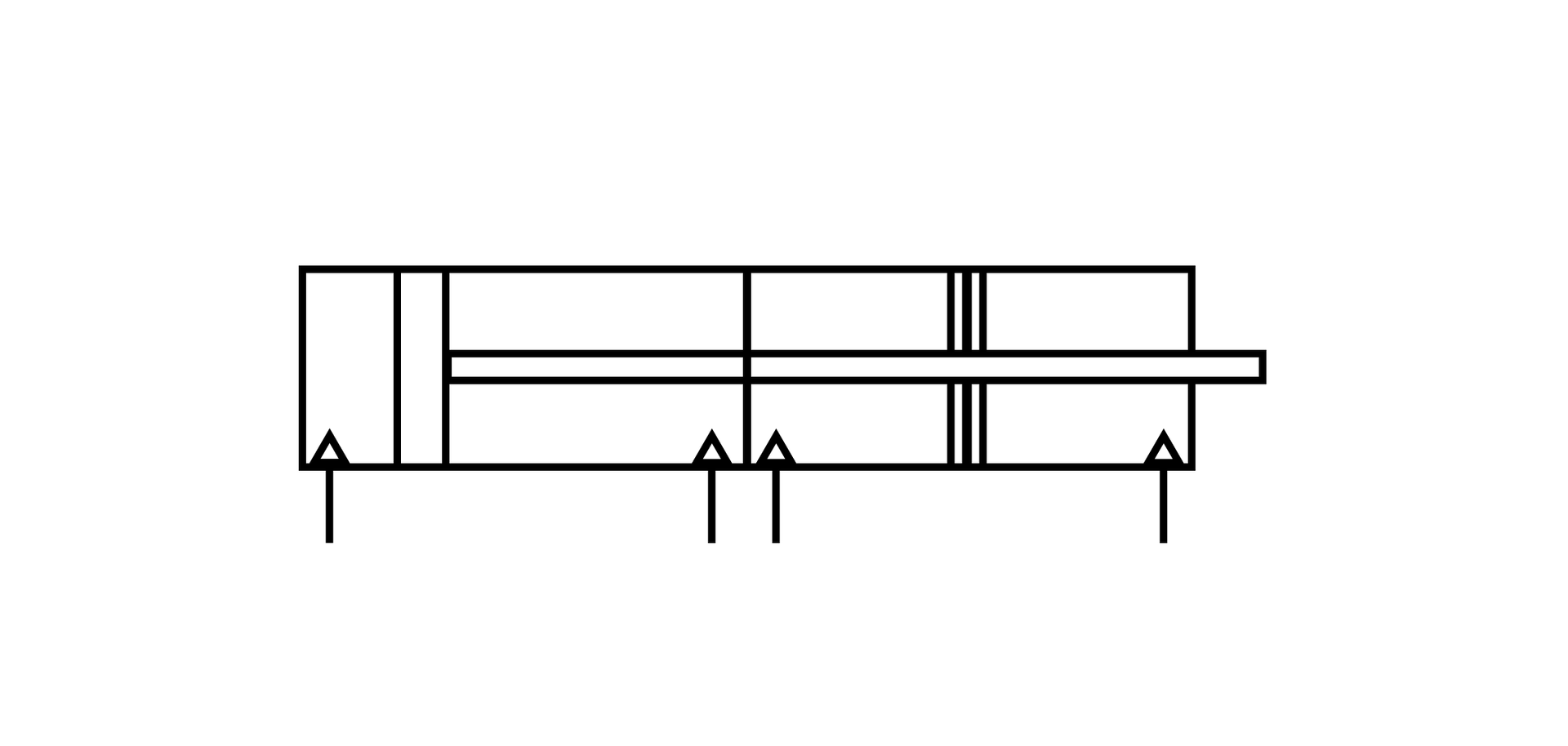
Siłowniki tłokowe dwustronnego działania dwukomorowy
Opiera się na budowie siłownika typu tandem, posiada tylko dwa oddzielne tłoczyska. Dzięki temu możliwe jest uzyskanie trzech pozycji tłoczyska wystającego z siłownika. Siłownik o skoku krótszym jest siłownikiem jednostronnego działania, którego powrót następuje pod wpływem działania tłoka drugiego siłownika dwustronnego działania o skoku dłuższym.
Symbol graficzny | Objaśnienie symbolu |
|---|---|
 | Symbol siłownika pneumatycznego dwustronnego działania dwukomorowego trójpołożeniowego |
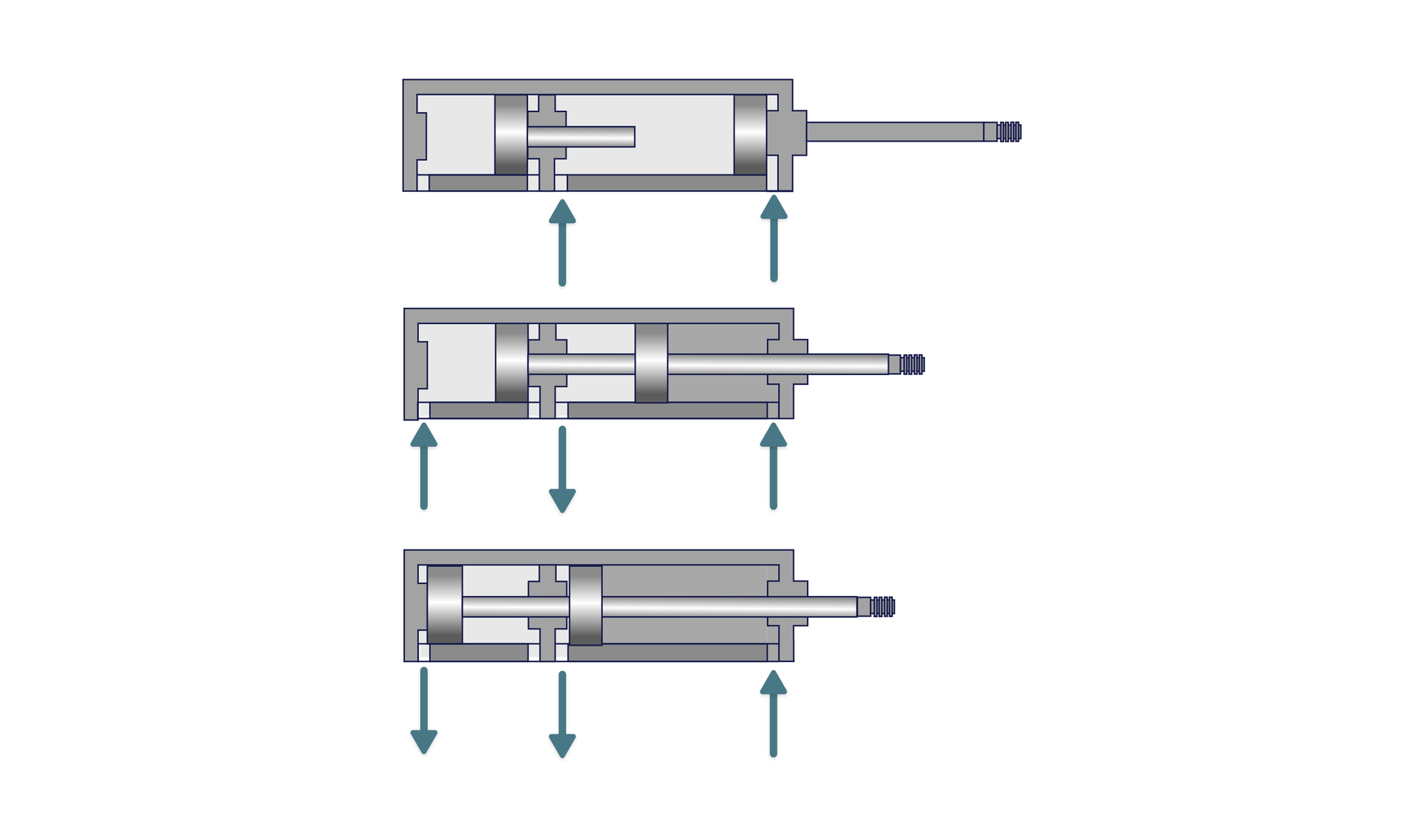
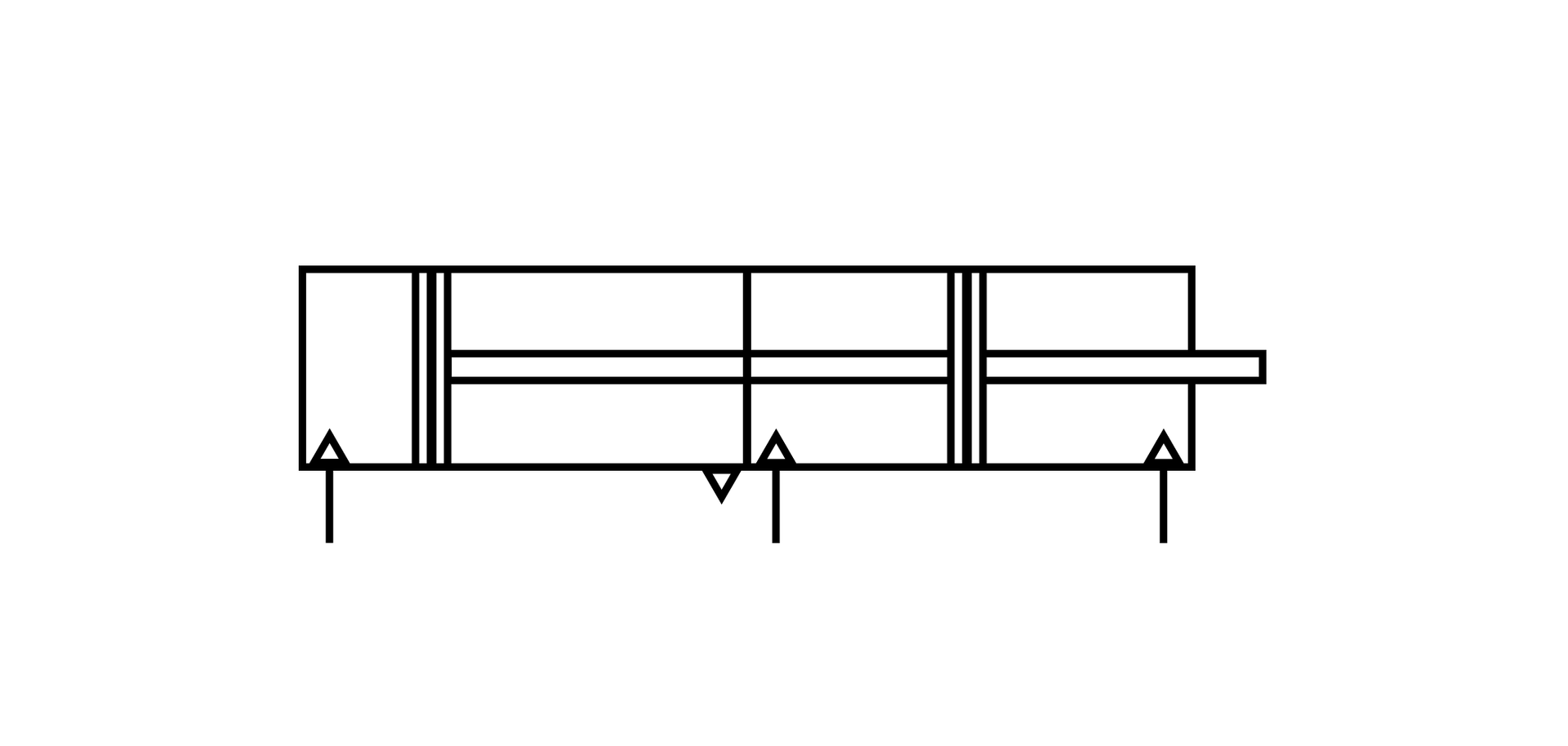
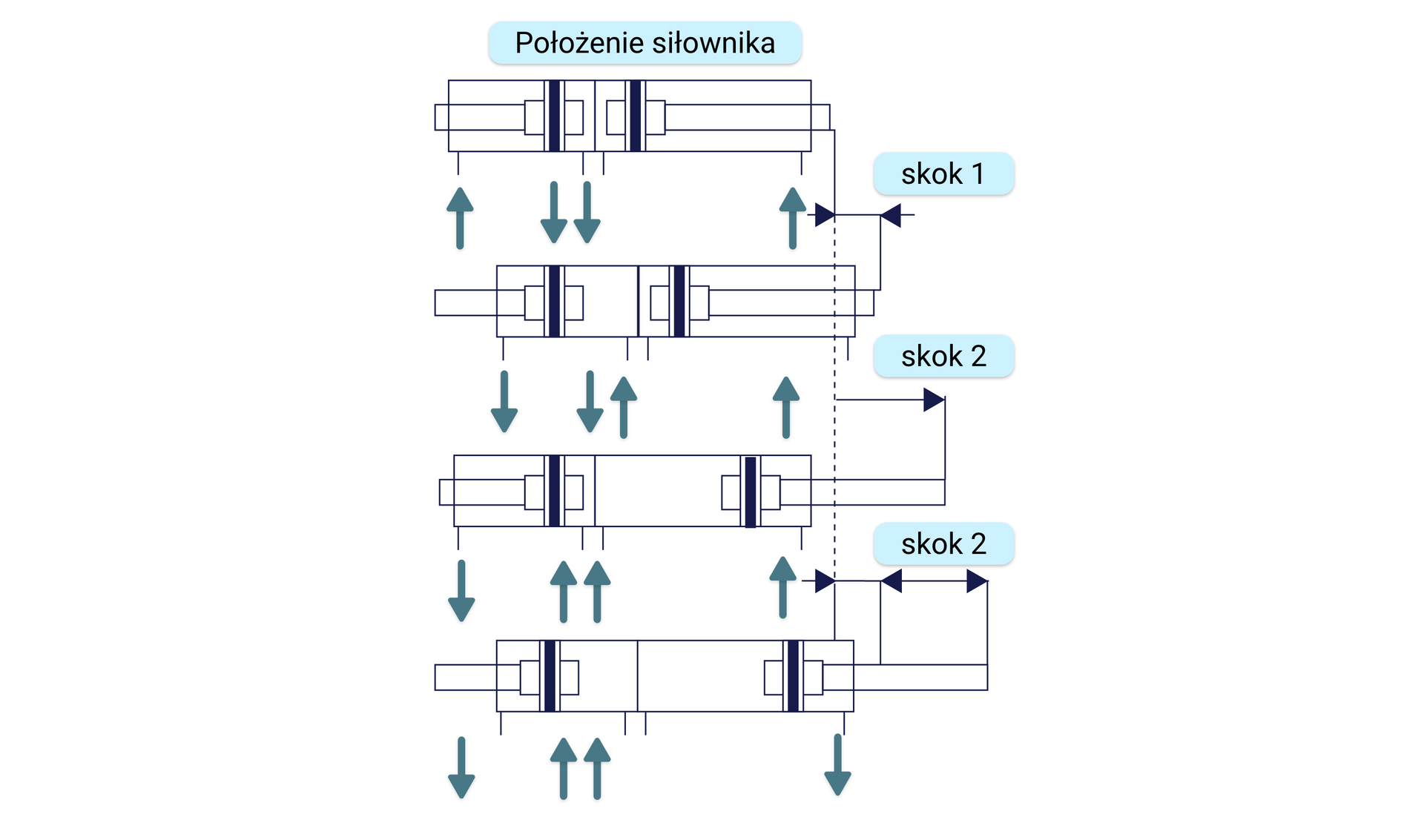
Siłowniki tłokowe dwustronnego działania dwukierunkowe czteropołożeniowe
Siłownik wielopołożeniowy składa się z dwóch siłowników dwustronnego działania. Są one ze sobą połączone pokrywamy tylnymi. Zależnie od zasilania sprężonym powietrzem następuje wysuniecie poszczególnych siłowników. Przy dwóch siłownikach o różnych skokach można osiągnąć cztery położenia.
Symbol graficzny | Objaśnienie symbolu |
|---|---|
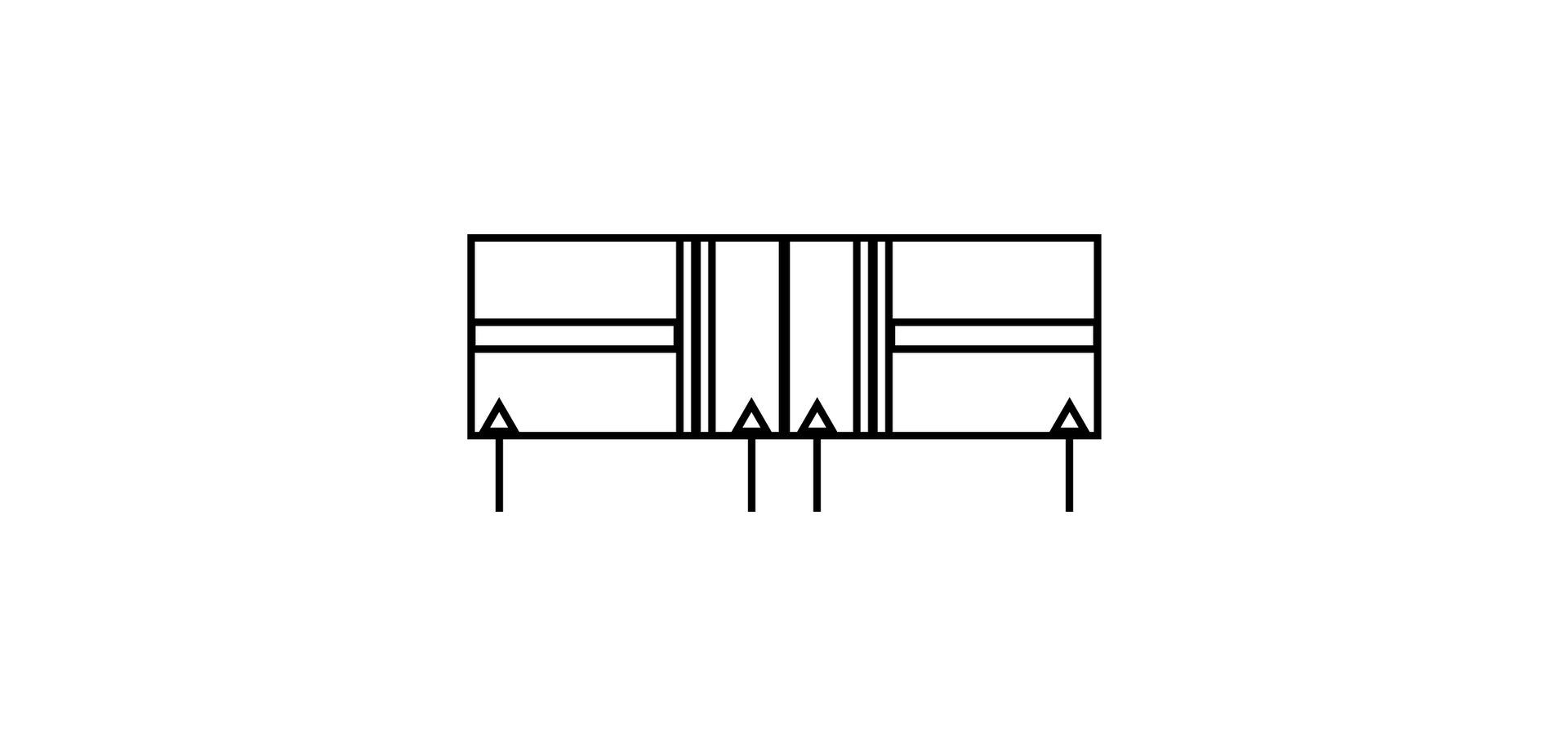 | Symbol siłownika pneumatycznego dwustronnego działania dwukierunkowego czteropołożeniowego |
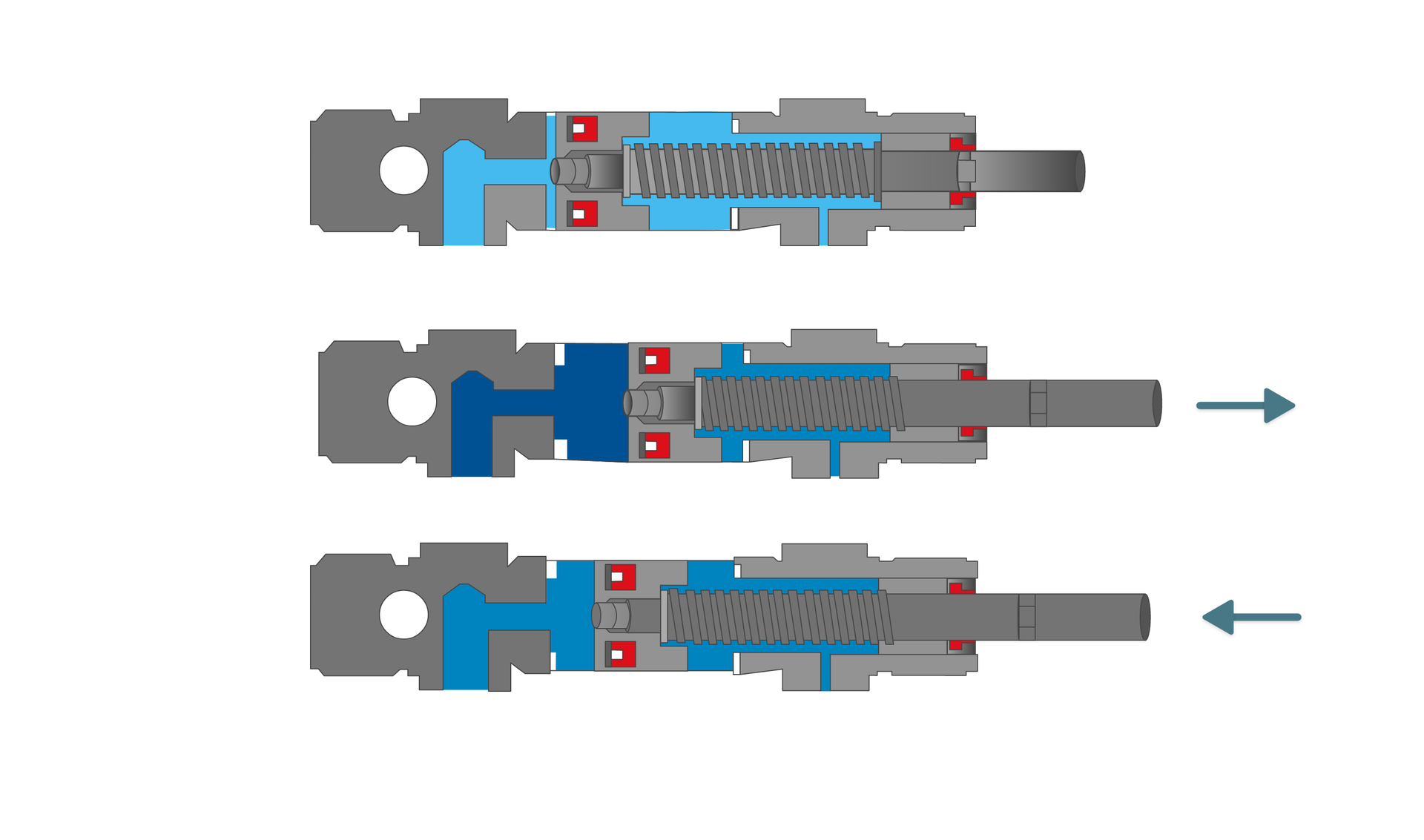
Siłowniki dwustronnego działania beztłoczyskowe
Istnieją trzy sposoby konstrukcji siłowników beztłoczyskowych:
siłownik taśmowy lub cięgnowy,
siłownik ze sprzężeniem mechanicznym (szczelinowy),
siłownik ze sprzężeniem magnetycznym.
W porównaniu z tradycyjnym siłownikiem dwustronnego działania siłowniki beztłoczyskowe są krótsze. Eliminuje to ryzyko wygięcia tłoczyska oraz umożliwia ruch w całej długości skoku. Konstrukcja siłownika pozwala osiągnąć długie skoki aż do . Obciążenie może być bezpośrednio mocowane do wózka lub suwaka. Ponieważ nie ma tłoczyska zmniejszającego powierzchnię tłoka z jednej strony, siły w obu kierunkach ruchu są jednakowe.
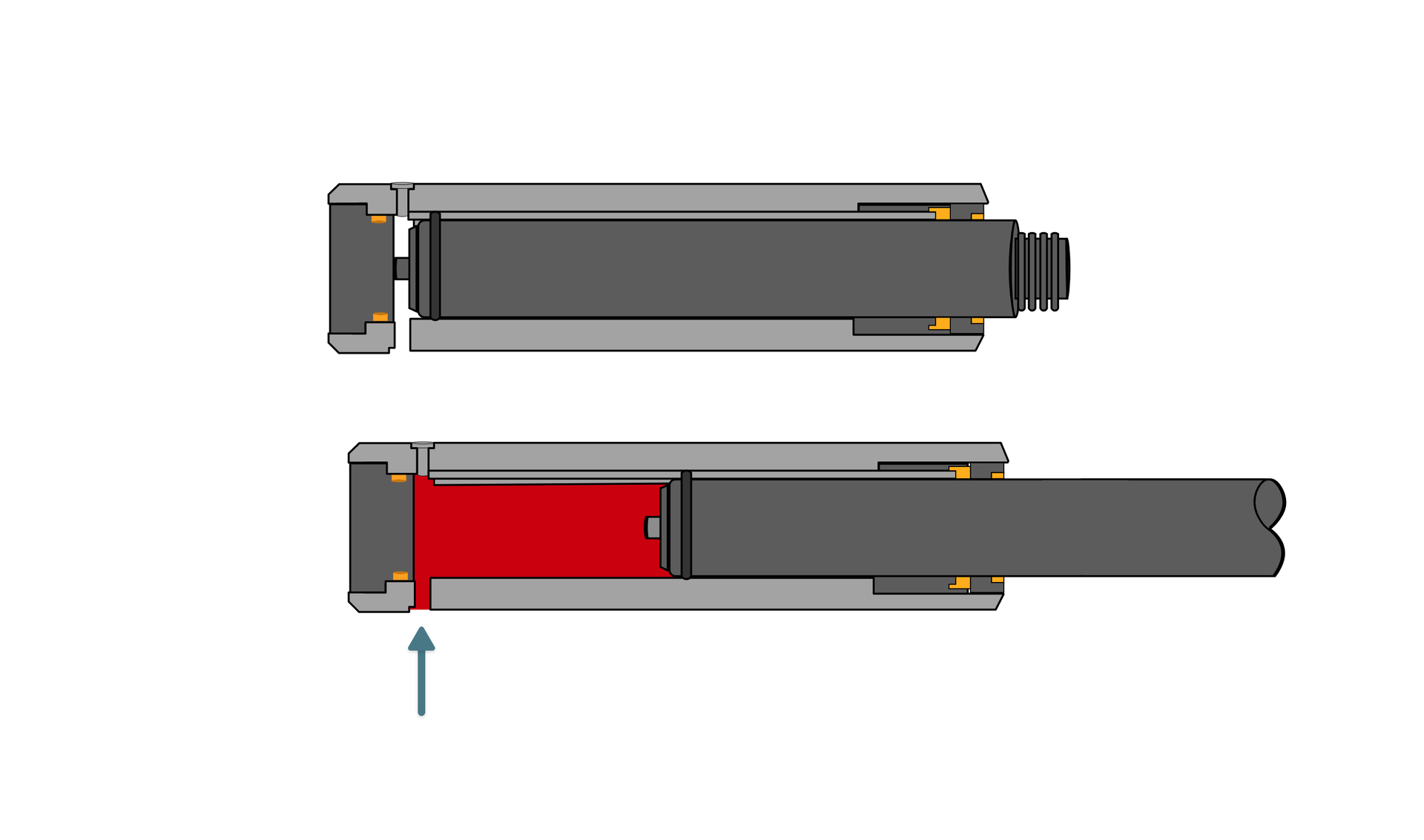
Siłowniki beztłoczyskowe cięgnowe
W przypadku siłowników cięgnowych siła tłoka jest przekazywana do suwaka za pomocą cięgna. Opuszczając komorę siłownika cięgno jest uszczelnione. W pokrywach siłownika poprzez rolki prowadzące zostaje zmieniony kierunek ruchu cięgna. Elementy czyszczące zapobiegaj przedostaniu się zanieczyszczeń do wnętrza siłownika.
Cięgno jest zamocowane to tłoka umieszczonego w tulei cylindrowej . Uszczelnienie cięgna zapewniają specjalne uszczelnienia , natomiast jego naciąg elementy umieszczone w suwaku . Prawidłowe prowadzenie cięgien zapewniają koła prowadzące . Siłowniki cięgnowe są wykonane o długościach dochodzących do kilku metrów, jednak wadą tych siłowników są trudności związane z uszczelnieniem tulei cylindrowej lub cięgna.
Symbol graficzny | Objaśnienie symbolu |
|---|---|
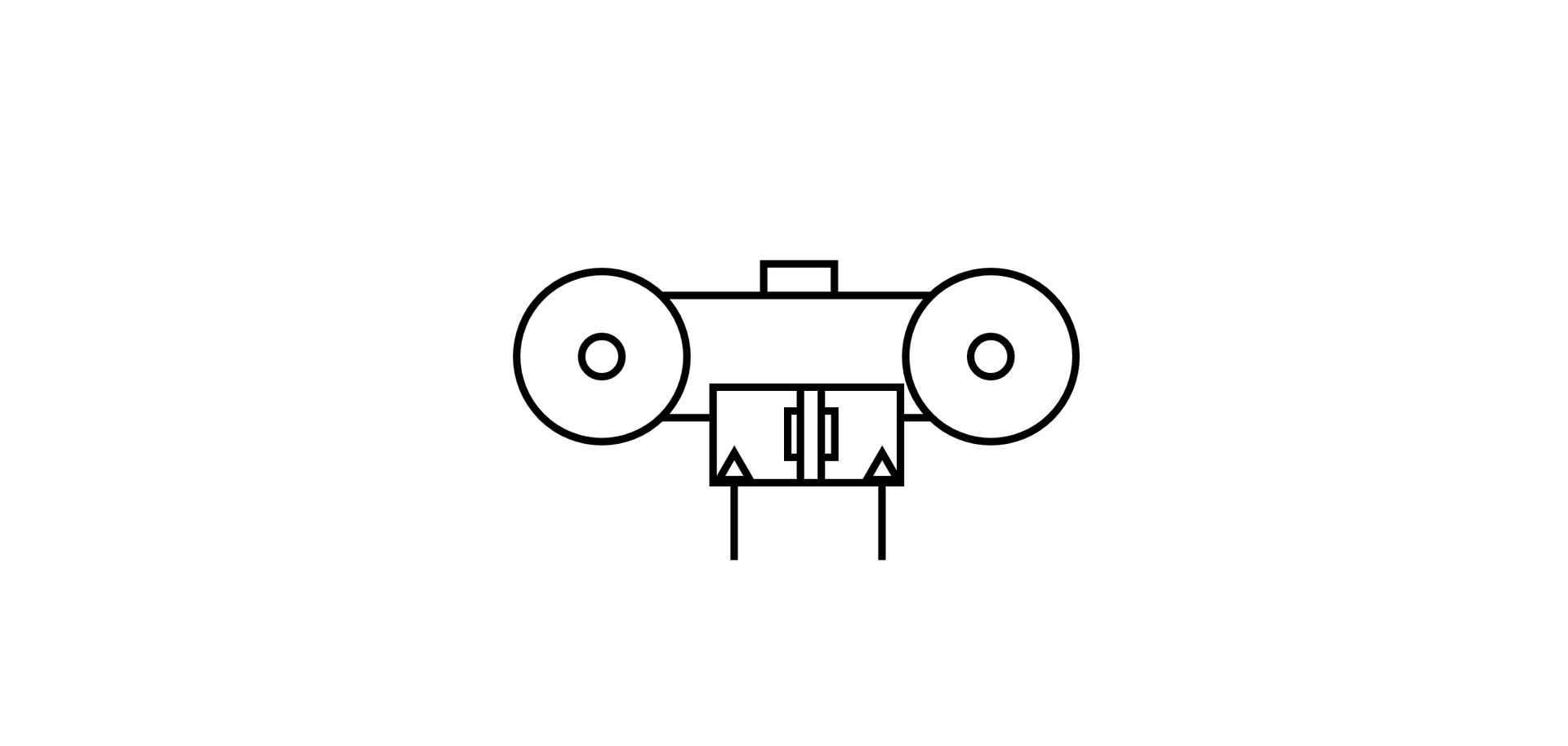 | Symbol siłownika pneumatycznego beztłoczyskowego cięgnowego |
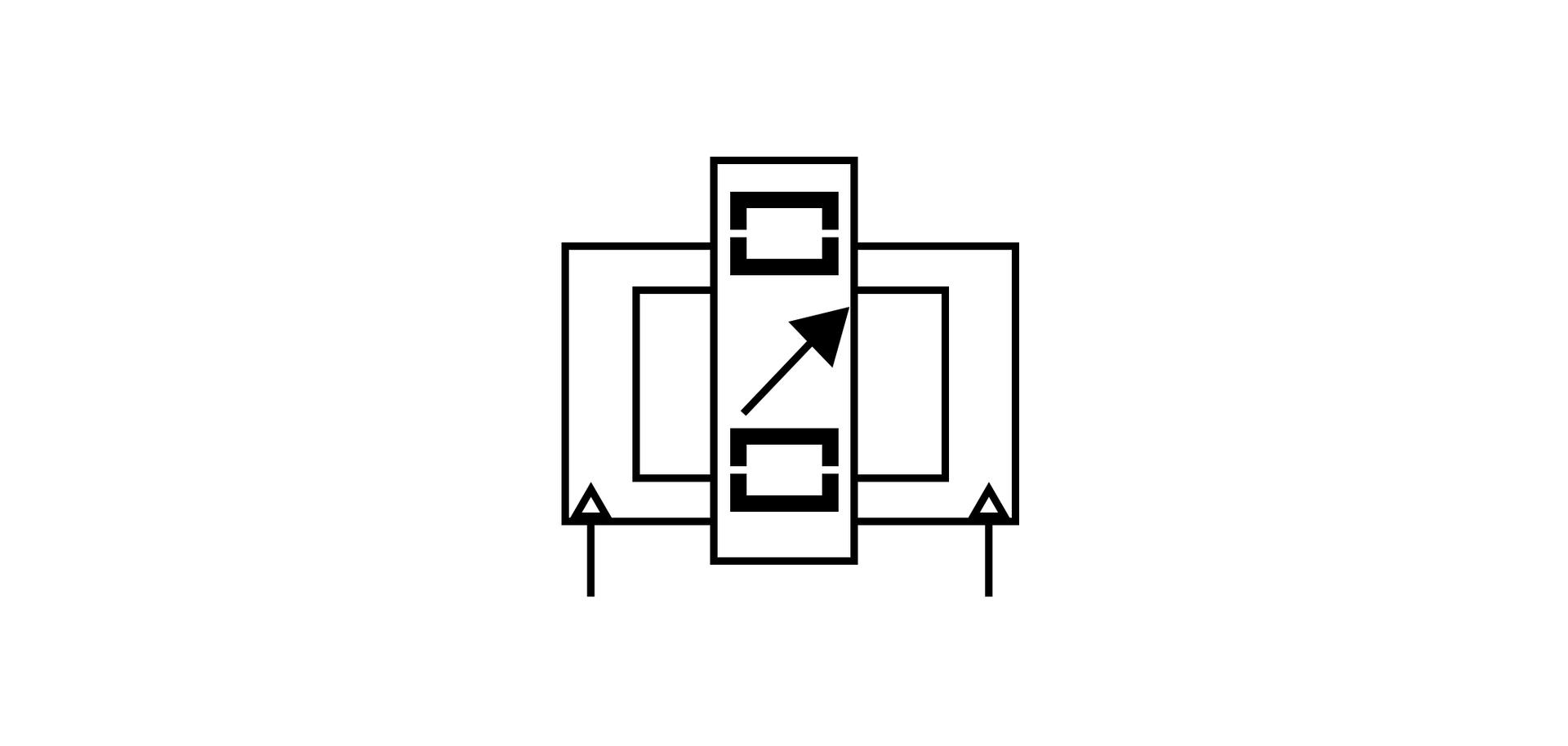
Siłowniki beztłoczyskowe ze sprzężeniem mechanicznym
W tym typie korpus siłownika jest wzdłuż całej długości przecięty. Siła jest przekazywana do suwaka, który jest połączony z tłokiem poprzez żebro. Łączące tłok z suwakiem żebro znajduje się w przecięciu korpusu. Rozpięta taśma uszczelniająca umieszczona z wewnętrznej strony przecięcia zapewnia szczelność komór po obu stronach tłoka. Między uszczelkami taśma znajduje się wewnątrz tłoka umożliwiając jego połączenie z suwakiem. Z zewnątrz przecięcie jest zakryte taśmą stalową w celu ochrony przed zanieczyszczeniami.
Symbol graficzny | Objaśnienie symbolu |
|---|---|
 | Symbol siłownika pneumatycznego beztłoczyskowego ze sprzężeniem mechanicznym |
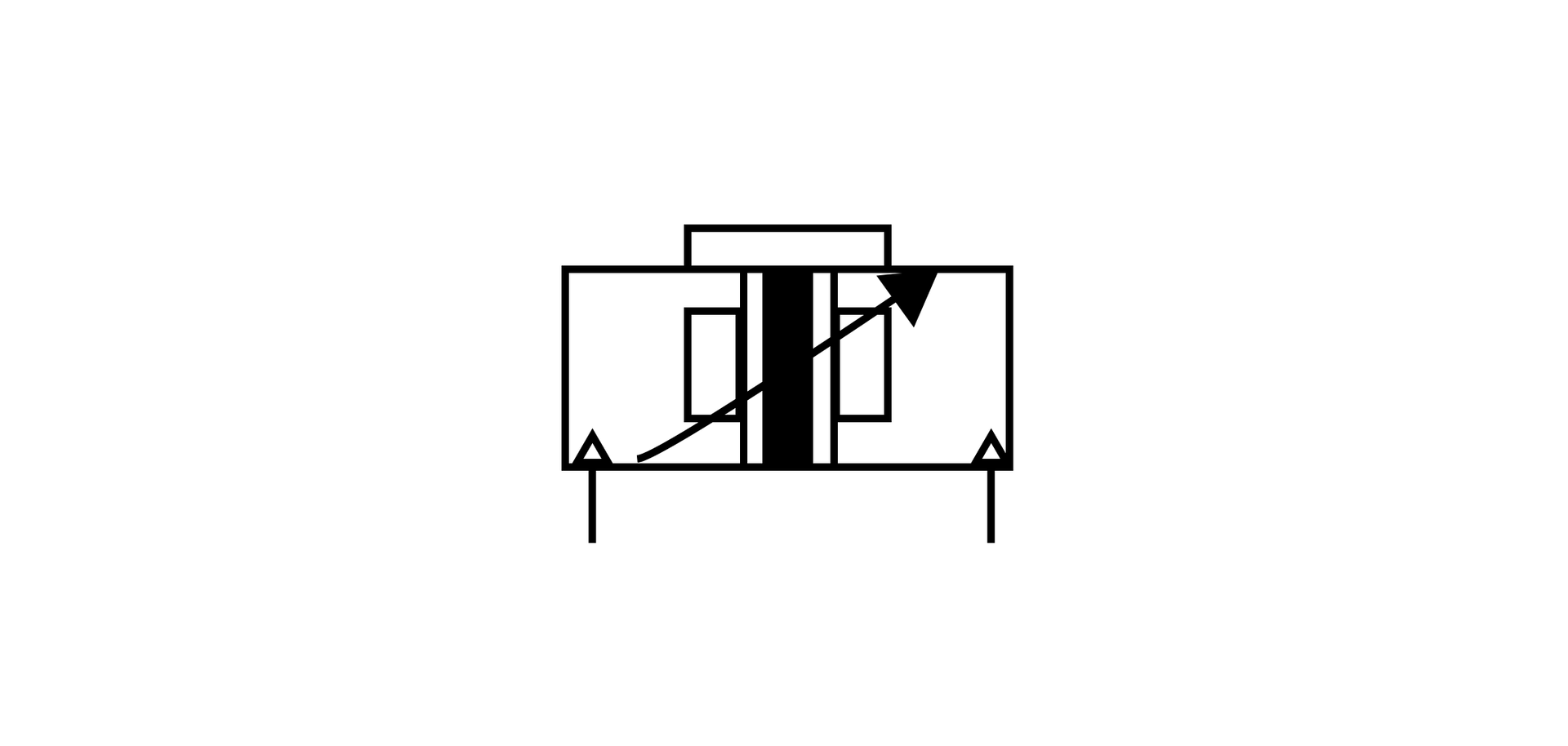
Siłowniki beztłoczyskowe ze sprzężeniem magnetycznym
W cienkościennej tulei o specjalnych własnościach magnetycznych umieszczony jest tłok z kompletem magnesów trwałych , który jest sprzęgnięty magnetycznie z suwakiem (również ma umieszczony komplet magnesów trwałych ). Powierzchnie czołowe suwaka są zamknięte pokrywami . Do przylgi suwaka można przykręcić odpowiednie elementy przenoszące siłę napędową rozwijaną przez siłownik. Na obu końcach siłownika są umieszczone stojaki . Powietrze jest dostarczone przez kanały zasilające i .
Symbol graficzny | Objaśnienie symbolu |
|---|---|
 | Symbol siłownika pneumatycznego beztłoczyskowego ze sprzężeniem mechanicznym |
Siłowniki obrotowe wahadłowe
Siłowniki te pozwalają na uzyskanie obrotu wału siłownika w zależności od konstrukcji do . Najczęściej są wykorzystywane do sterowania zaworami odcinającymi lub przekierowywania linii transportowych.
Symbol graficzny | Objaśnienie symbolu |
|---|---|
 | Symbol siłownika pneumatycznego wahadłowego |
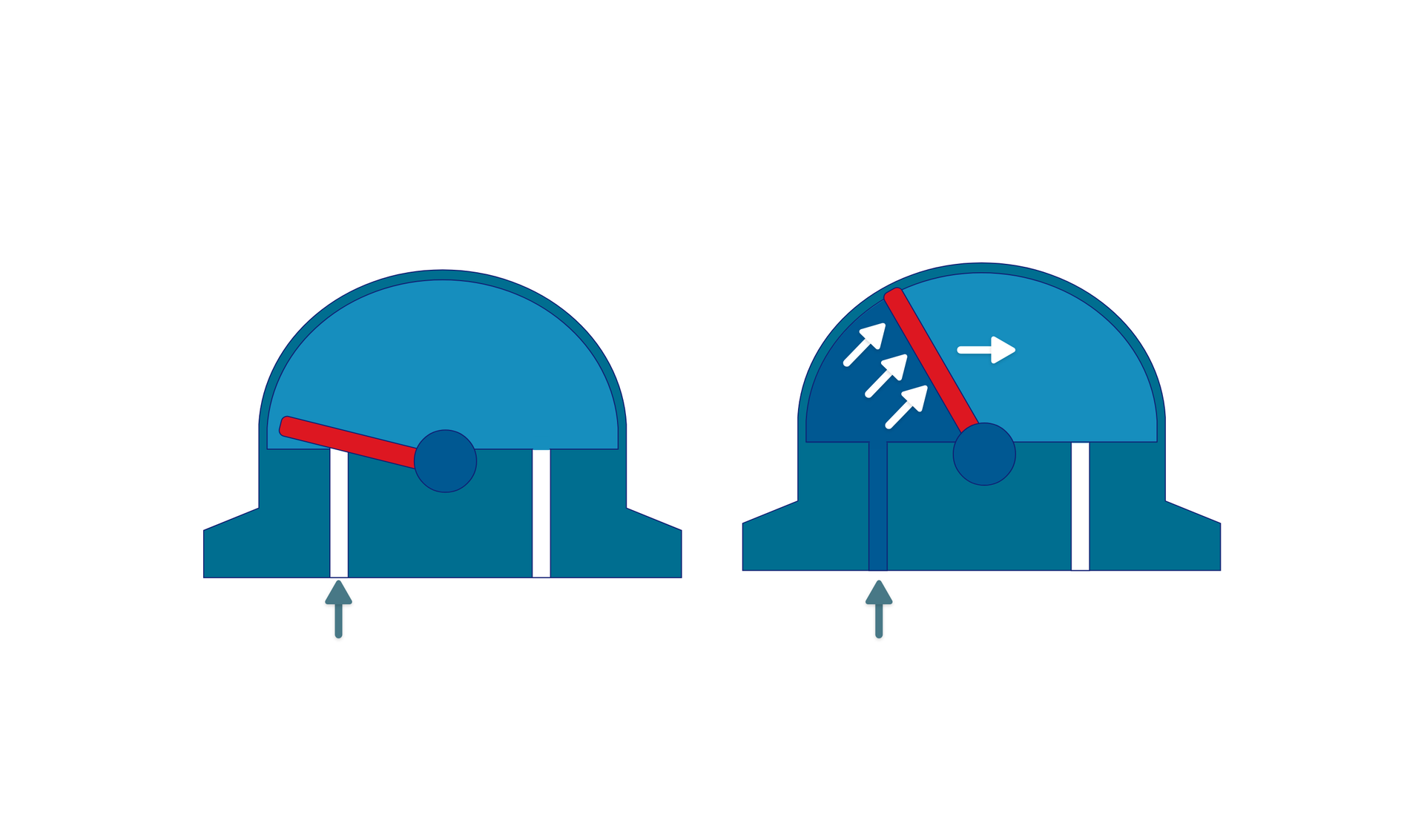
Siłowniki wahadłowe łopatkowe
W siłowniku łopatkowym siła jest przekazywana poprzez łopatkę obrotową bezpośrednio na wałek napędowy. Kąt obrotu jest nastawiany bezstopniowo od do maksymalnie . Moment obrotowy nie przekracza .
Siłowniki wahadłowe z przekładnią zębatą
Do napędu ruchu obrotowego o kącie obrotu nie większym niż wykorzystuje się siłowniki wahadłowe z wbudowaną przekładnią. W tym wykonaniu siłownika dwustronnego działania tłoczysko wyposażone jest w listwę zębatą. Tłoczysko uruchamia koło zębate, ruch postępowy zostaje zamieniony na obrotowy. Kąty obrotu są różne, od , , , do zasięgu obrotu. Moment obrotowy jest zależny od ciśnienia, powierzchni tłoka i przełożenia, możliwe są wartości do ok. .
Siłownik składa się z dwóch tłoków umieszczonych w tulejach cylindrycznych , które stanowią całość z zębatką . Zębatka napędza koło zębate osadzone na wałku wyjściowym . Tłoki są zaopatrzone w wewnętrzne uszczelnienie za pomocą pierścieni uszczelniających , które współpracując z tulejami zapewniają ich amortyzację w krańcowych położeniach.
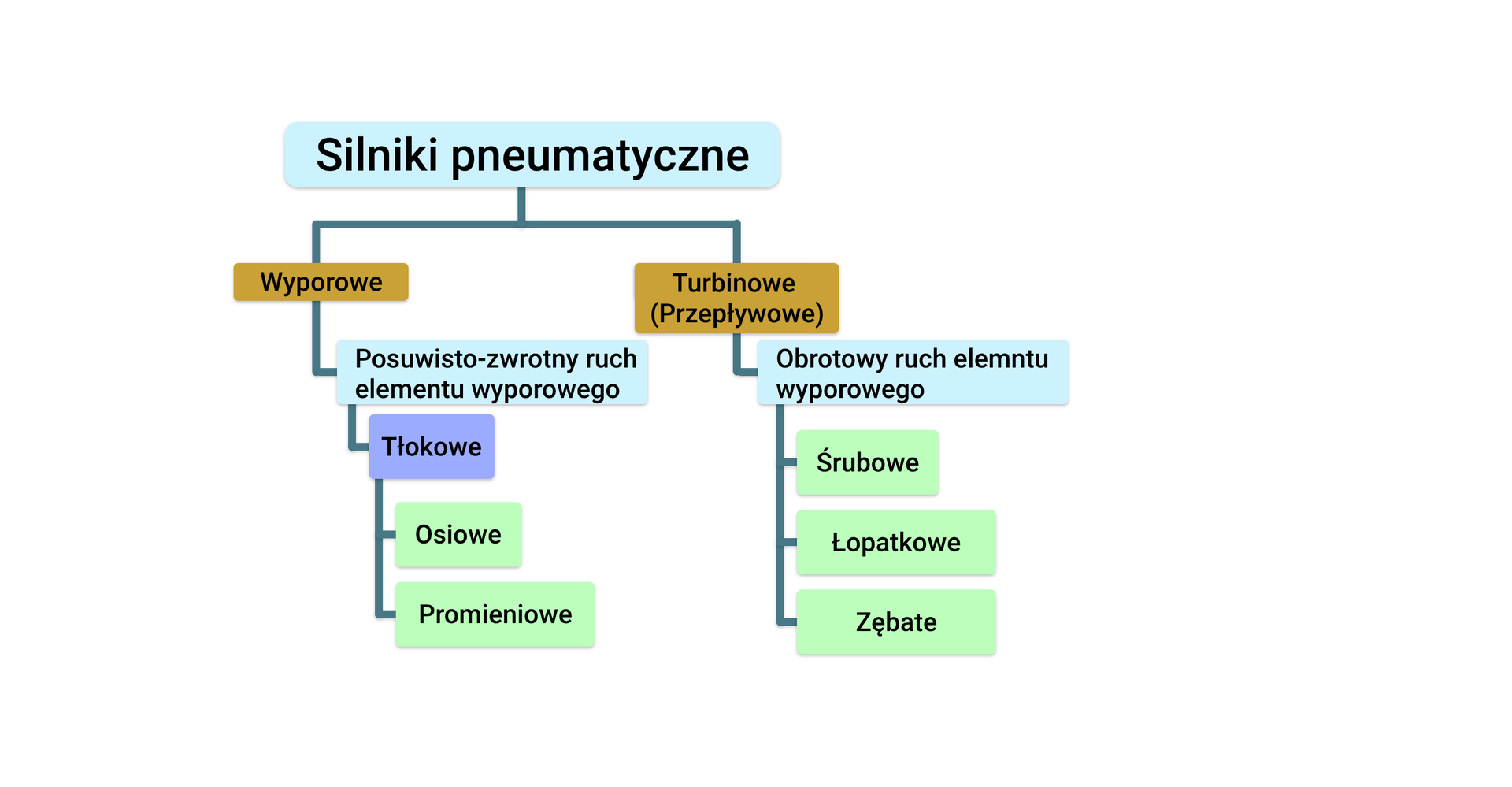
Silniki pneumatyczne
Silnikiem pneumatycznym nazywamy maszynę pneumatyczną, przetwarzającą energię sprężonego powietrza lub innego gazu na ruch obrotowy. W tych silnikach pracę wykonuje dostarczony z zewnątrz sprężony gaz.
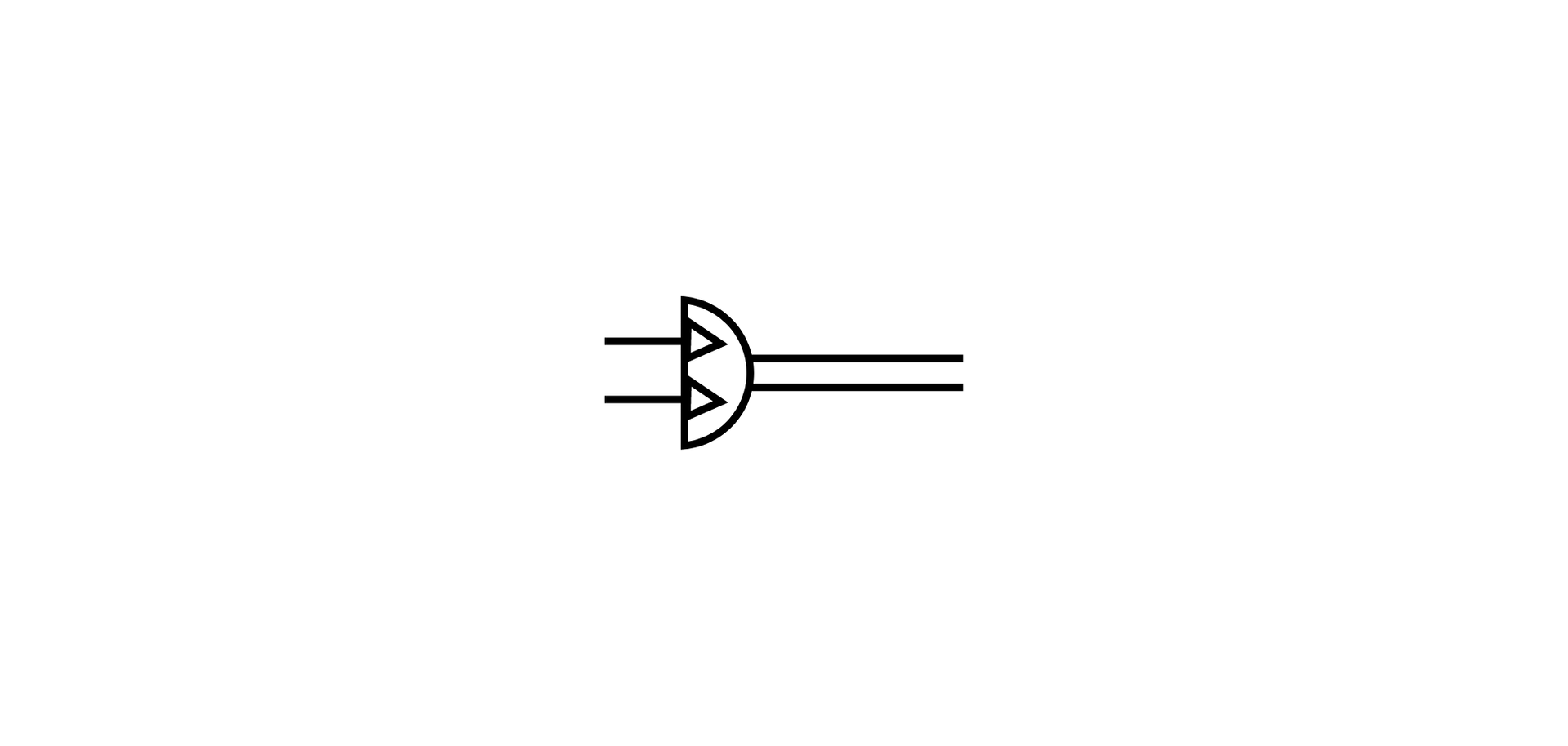
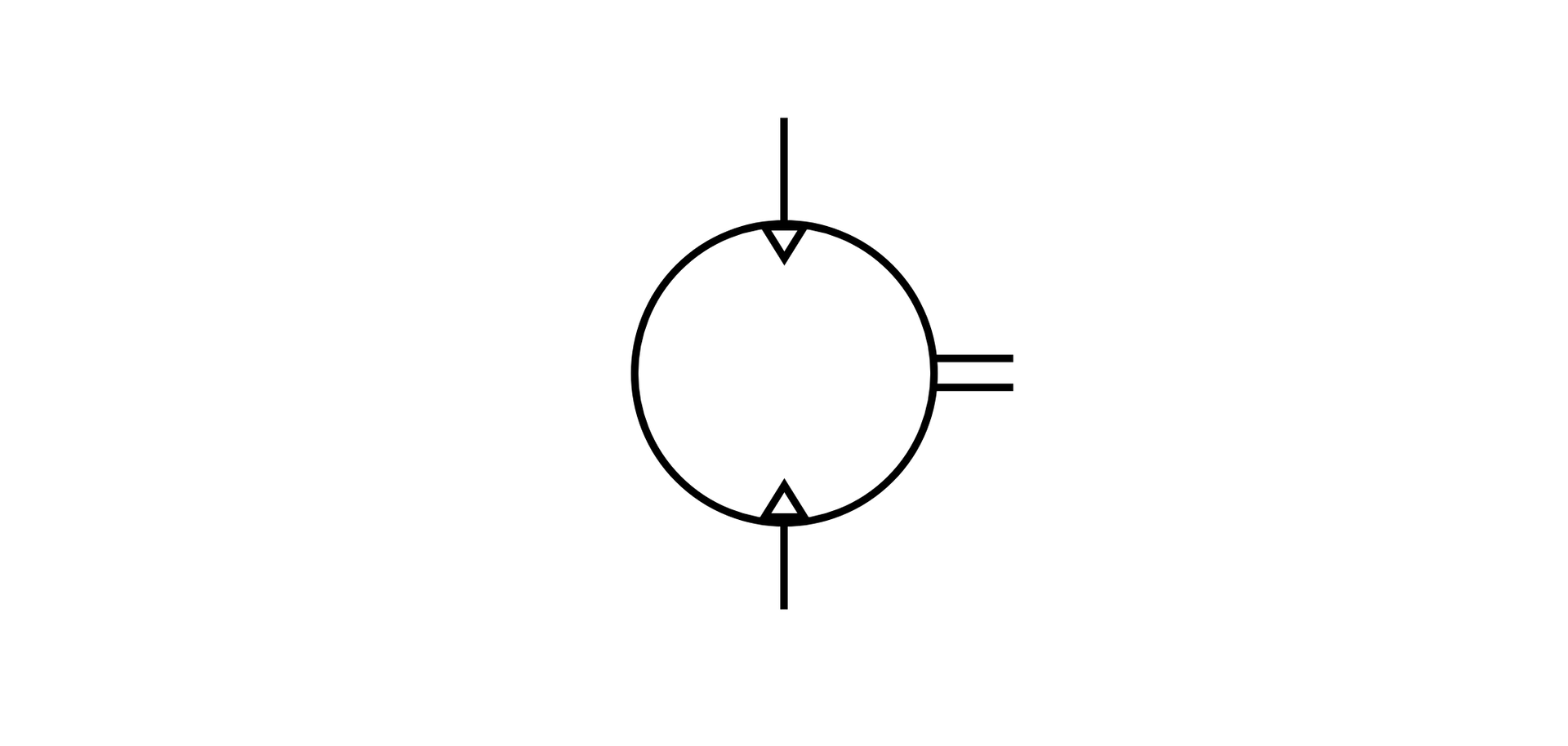
Symbol graficzny | Objaśnienie symbolu |
|---|---|
 | Symbol silnika pneumatycznego |
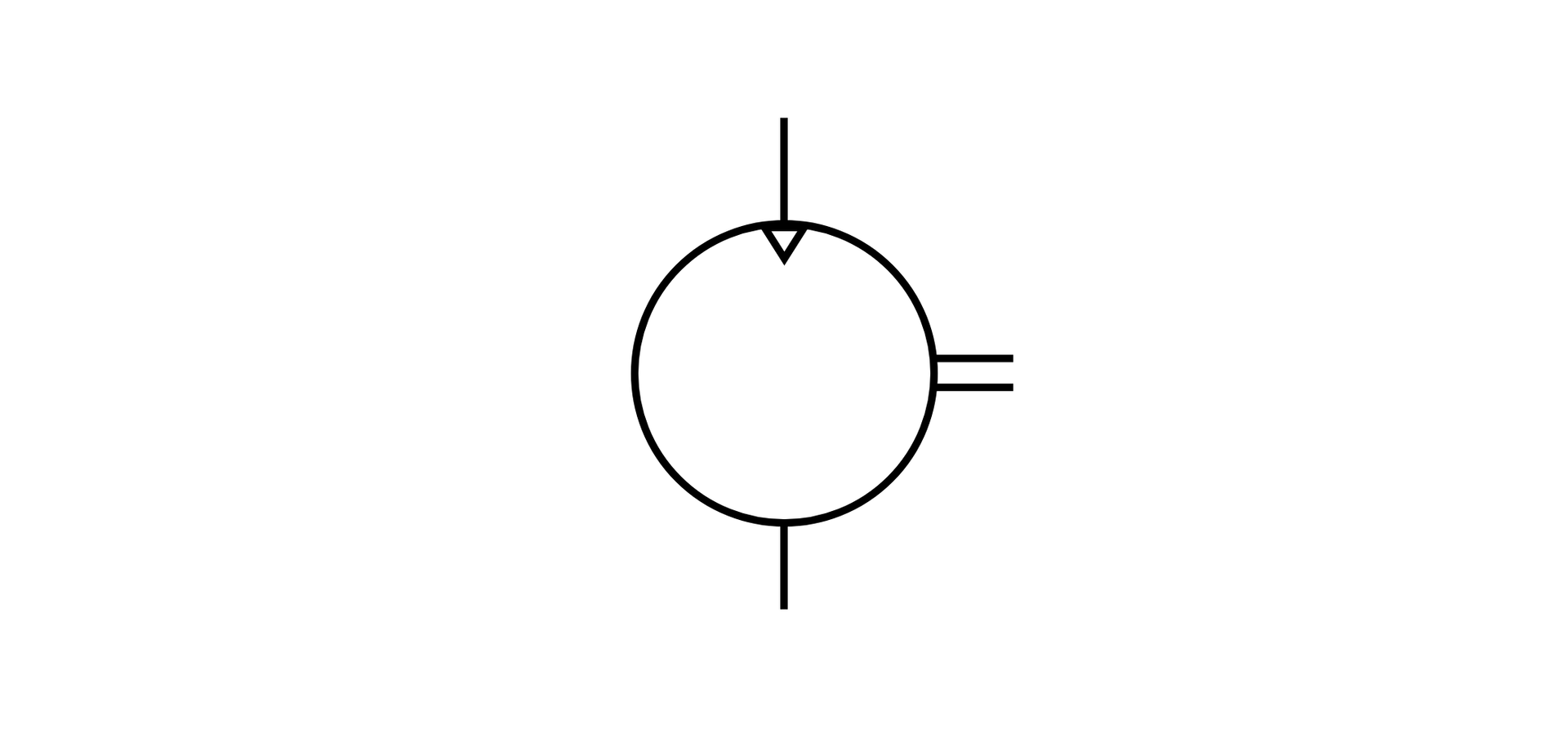
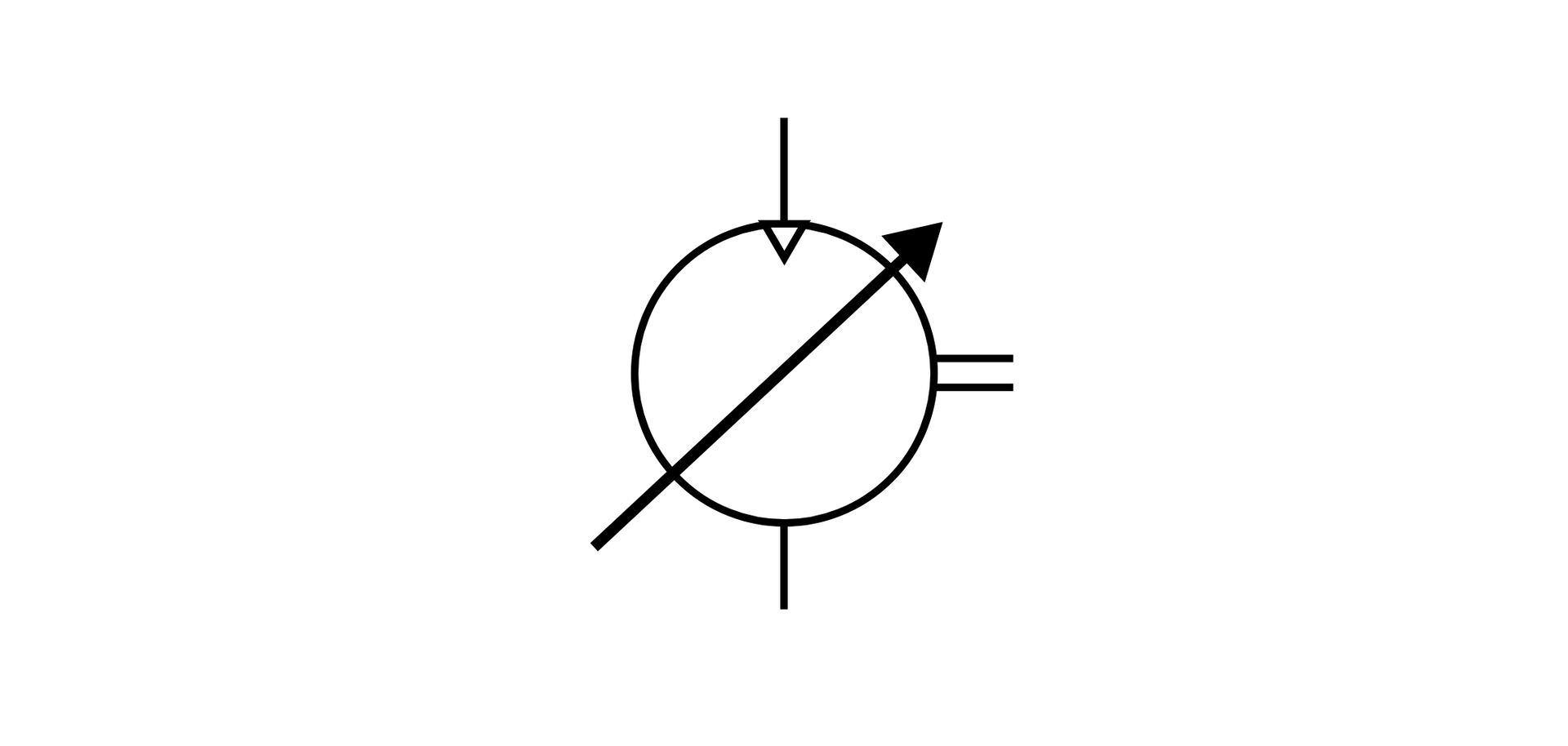 | Symbol silnik pneumatycznego o zmiennej objętości roboczej |
 | Symbol silnik pneumatycznego o dwóch kierunkach przepływu, o stałej objętości roboczej |
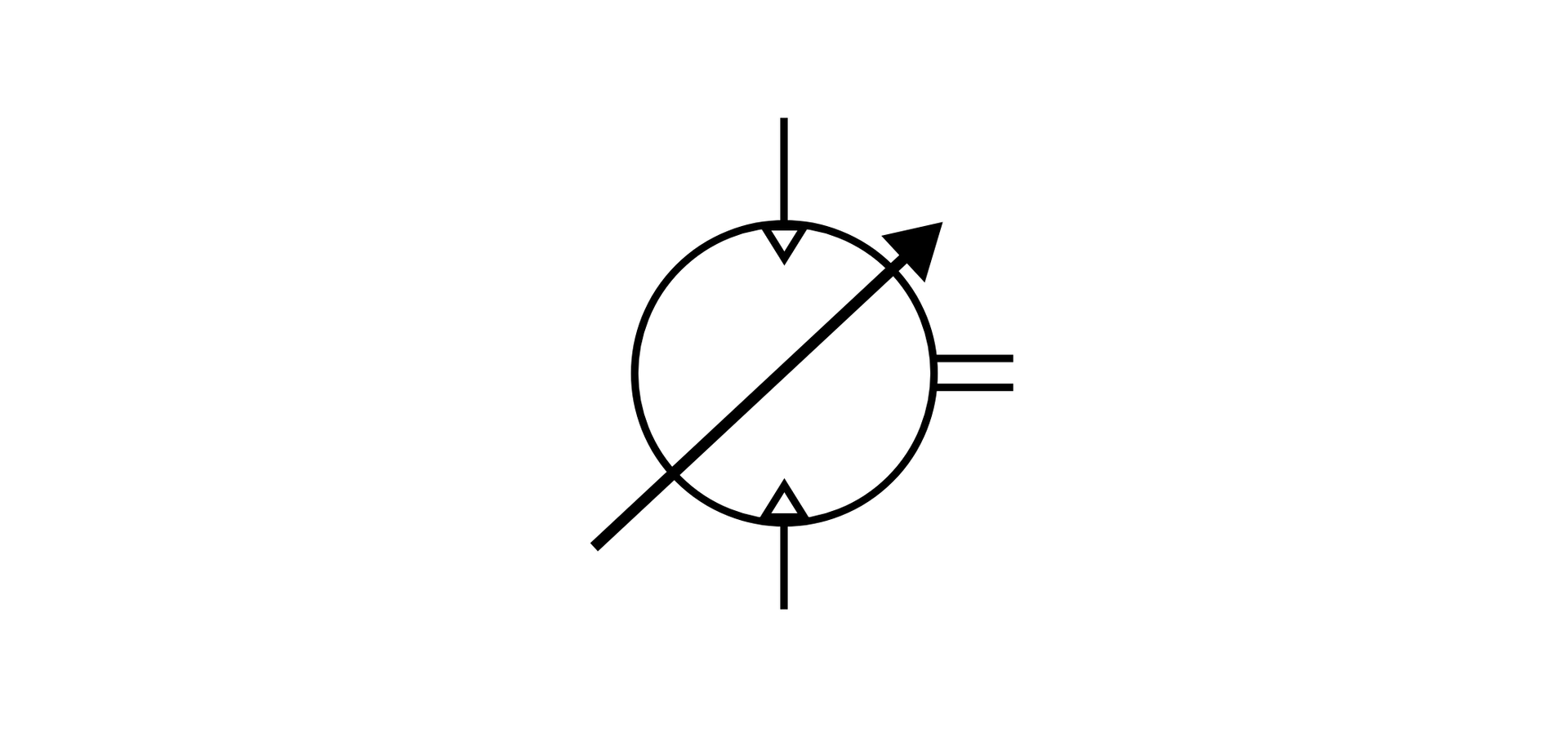 | Symbol silnik pneumatycznego o dwóch kierunkach przepływu, o zmiennej objętości roboczej |
W silniku tłokowym osiowym sprężone powietrze podawane jest przez odpowiednio wyprofilowane kanały do cylindrów. Powietrze powoduje przemieszczanie się tłoków, a te popychają mimośrodową tarczę wprawiając ją w ruch obrotowy. Moment obrotowy z tarczy przenoszony jest na wał. Wykorzystane powietrze jest odprowadzane na zewnątrz przez odpowiednio wyprofilowane kanały wylotowe.
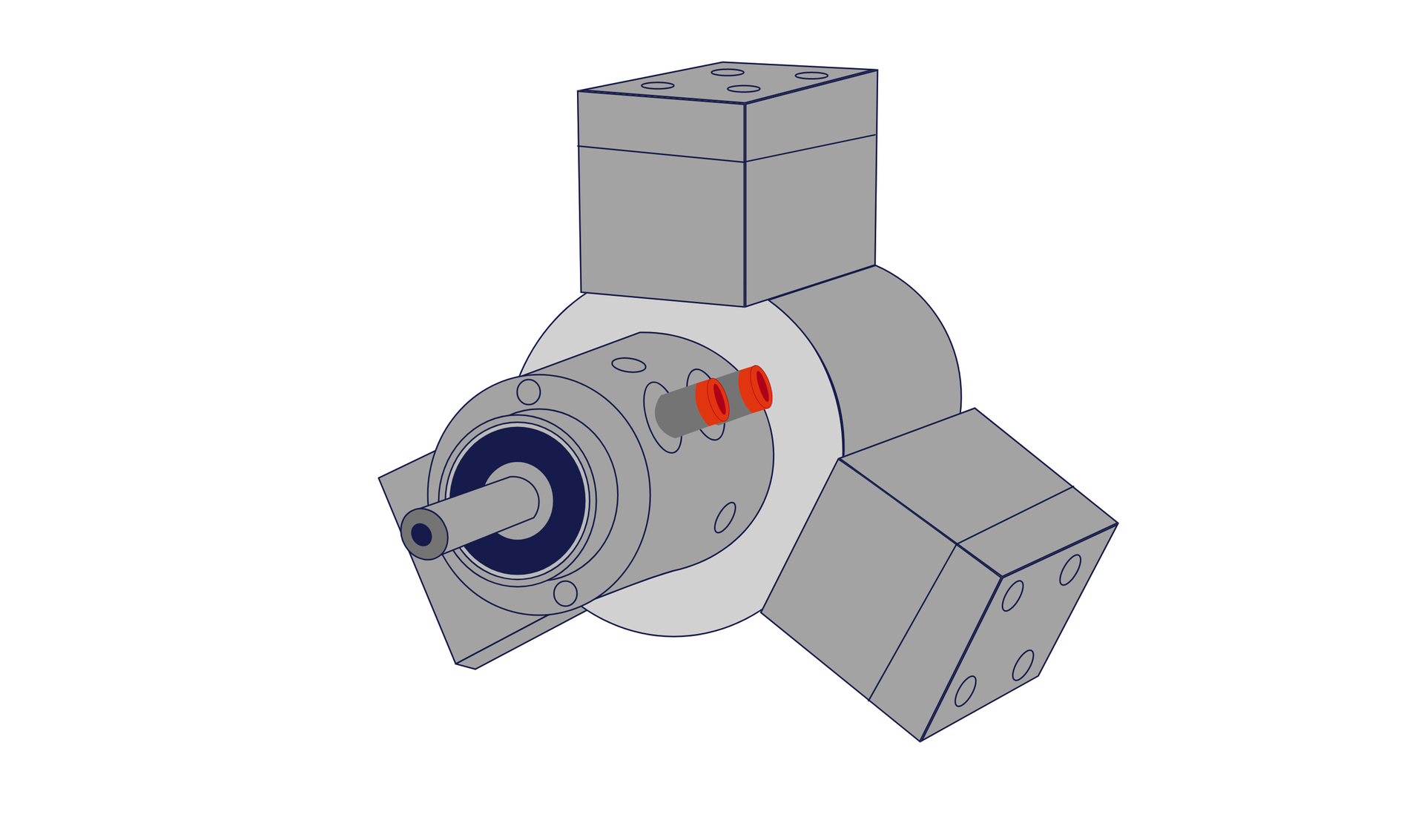
Jedną z odmian silnika tłokowego promieniowego jest wielotłoczkowy silnik promieniowy z tłokami wirującymi, gdzie powietrze pod ciśnieniem doprowadzane jest do połowy ze wszystkich komór utworzonych przez wirnik i tłoczki. Pod działaniem czynnika tłoczki dążą do wysuwania się z wirnika. Ruch tłoczków za pomocą pierścienia z bieżnią powoduje obrót wałka odbiorczego. Powietrze z pozostałych komór wirnika odprowadzane jest do otoczenia przez wysuwowy ruch tłoczków. Cykl odpowietrzania komór lub ich napełniania koordynuje pierścień sterujący
Kolejną z odmian silnika tłokowego jest wielotłoczkowy silnik promieniowy z tłokami niewirującymi, gdzie powietrze pod ciśnieniem doprowadzane jest odpowiedniej kolejności do komór cylindrów rozłożonych promieniowo wokół napędzanego wału. Ruch tłoków jest zamieniany na ruch obrotowy wału poprzez korbowód lub krzywkę.
Typowy silnik łopatkowy zbudowany jest z cylindra oraz wirnika z łopatkami umieszczonymi w szczelinach wzdłużnych. Czoła wirnika zamknięte są pokrywami , w których ułożyskowany jest wirnik. Wirnik zamontowany jest mimośrodowo w stosunku do osi cylindra, co powoduje, że pomiędzy ścianką wewnętrzną cylindra, łopatkami oraz wirnikiem powstają komory robocze o zmieniającej się objętości.
Sprężone powietrze wprowadzane jest pomiędzy dwie sąsiadujące łopatki. Wskutek różnicy ciśnień przed i za łopatką wirnik zostaje wprowadzony w ruch obrotowy. Podczas pracy łopatki dociskane są do powierzchni wewnętrznej cylindra siłą odśrodkową, zapewniając w ten sposób efektywne uszczelnienie.
Silniki tego typu pracują przy obrotach od kilku tysięcy do kilkudziesięciu tysięcy obrotów na minutę. Liczba łopatek w silniku zawiera się od do . Mniejsza liczba łopatek zwiększa sprawność silnika, ale utrudnia jego rozruch
W silniku zębatym w korpusie znajdują się dwa koła zębate i , z których koło jest sprzęgnięte z napędzanym wałkiem , a koło jest kołem współpracującym. Kierunek obrotów wałka zależy od kierunku doprowadzenia sprężonego powietrza. W silnikach zębatych moment obrotowy powstaje w wyniku siły działającej na powierzchnię zębów dwóch współpracujących ze sobą kół zębatych. Wartość siły, jaka działa na koła zębate, zależy od ciśnienia gazu dolotowego, a jego obroty od strumienia gazu. Silniki te znajdują zastosowanie w napędach o dużych mocach, powyżej .
W silnikach turbinowych w korpusie umieszczone jest koło łopatkowe napędzające wałek . Zasilanie silnika odbywa się przez otwór wlotowy , a rozprężenie gazu występuje na wylocie . Ruch obrotowy wałka wymusza strumień gazu przepływającego przez silnik.
Silniki tego typu są stosowane przy małych obciążeniach, mogą natomiast osiągać bardzo duże obroty (nawet do ), na przykład w napędach wiertarek dentystycznych.
Powrót do spisu treściPowrót do spisu treści