E‑book - Geodezyjna obsługa obiektów inżynierskich

Spis treści
1. Wstęp1. Wstęp
2. Metoda biegunowa2. Metoda biegunowa
3. Metoda swobodnego stanowiska3. Metoda swobodnego stanowiska
4. Metoda prostej odniesienia4. Metoda prostej odniesienia
5. Metoda rzutowania5. Metoda rzutowania
6. Metoda przestrzennych wcięć kątowych6. Metoda przestrzennych wcięć kątowych
7. Metoda biegunowa 3D7. Metoda biegunowa 3D
8. Metoda trygonometryczna8. Metoda trygonometryczna
9. Metoda dwusiecznych kierunków stycznych9. Metoda dwusiecznych kierunków stycznych
10. Przykład pomiarowy dotyczący wyznaczenia ugięcia i wyboczenia dźwigara10. Przykład pomiarowy dotyczący wyznaczenia ugięcia i wyboczenia dźwigara
1. Wstęp
Geodezyjne pomiary realizacyjne oraz kontrolne wymagają od technika geodety, znajomości metod pomiarowych niezbędnych na etapie realizacji obiektu jak również później w trakcie eksploatacji danego obiektu. W tym opracowaniu przedstawiono wybrane metody pomiarowe służące zarówno tyczeniu obiektów w terenie jak również realizacji pomiarów kontrolnych. Dla każdej z nich oprócz opisu zamieszczono również informację w jakich sytuacjach można ją stosować.
2. Metoda biegunowa
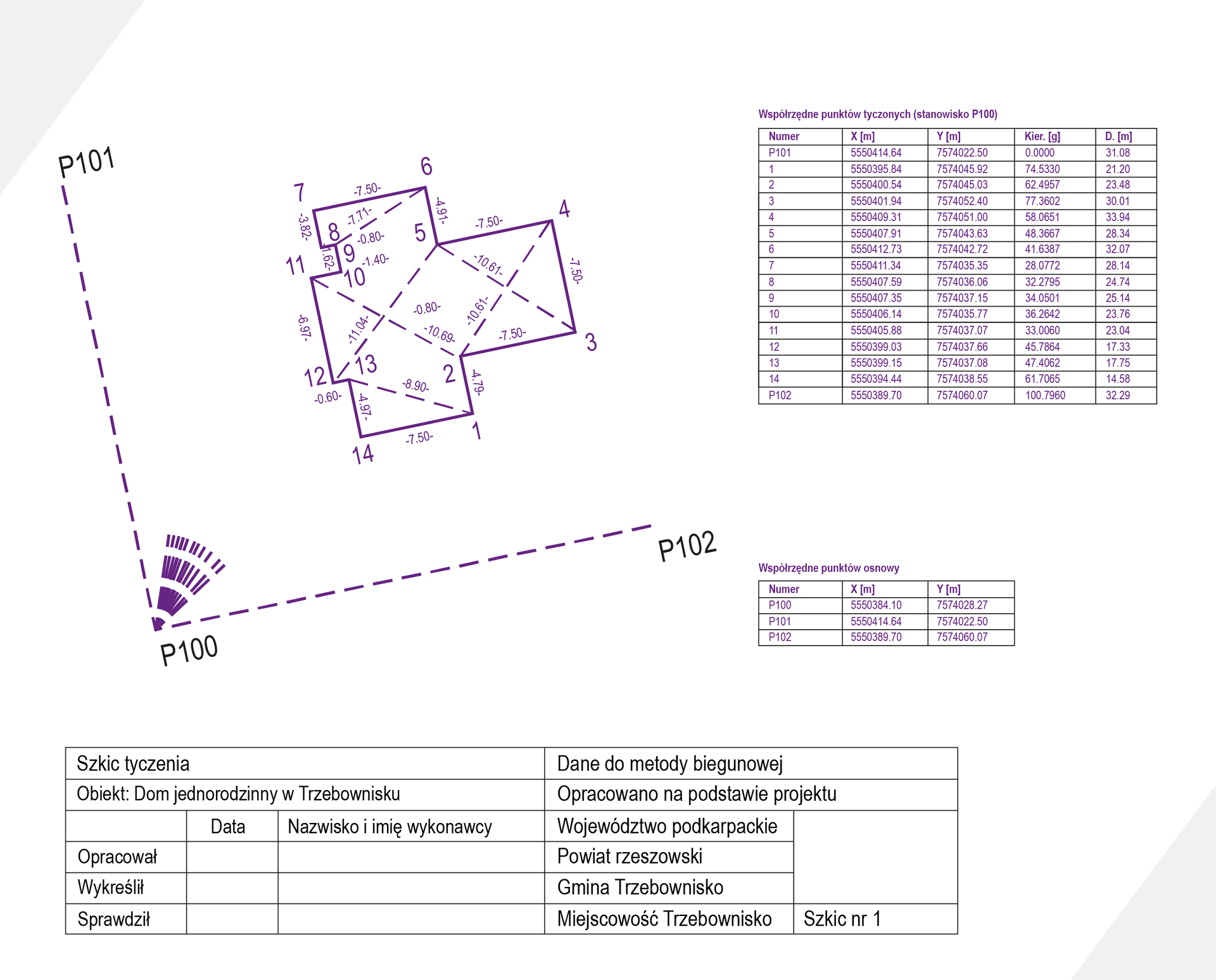
Metoda biegunowa polega na ustawieniu instrumentu, np. tachimetru nad punktem osnowy o znanych współrzędnych. Instrument należy spoziomować oraz wykonać dokładne centrowanie nad punktem osnowy. Następnie w nawiązaniu do punktu osnowy o znanych współrzędnych należy odłożyć kąt oraz odmierzyć odległość do tyczonego punktu.
Powyższy opis dokładnie ilustruje przedstawiony poniżej szkic tyczenia
Stanowiskiem dla metody biegunowej jest w tym przypadku punkt P100 niego są tyczone poszczególne punkty obrysu budynku. Nawiązanie stanowiska stanowi punkt P101. Po dokładnym wycelowaniu na ten punkt należy ustawić odczyt kręgu poziomego (Hz) równy 0. Następnie odkładając kąt oraz odmierzając odległość należy tyczyć poszczególne punkty.
Metoda ta ma szerokie zastosowanie i może być z powodzeniem stosowana w różnorodnych pomiarach realizacyjnych m.in. z zakresu budownictwa ogólnego, budownictwa drogowego.
W tym miejscu należy jednak zwrócić uwagę na ograniczenia wynikające ze stosowania tej metody.
Wymusza ona ustawienie instrumentu w konkretnym miejscu stanowiącym punkt osnowy co w dynamicznym środowisku budowy nie zawsze jest optymalnym rozwiązaniem. Lepsza w takich sytuacjach może się okazać opisana w dalszej części metoda swobodnego stanowiska.
Powrót do spisu treściPowrót do spisu treści
3. Metoda swobodnego stanowiska
Metoda ta stanowi niejako połączenie metody wcięcia wstecz z metodą biegunową. Stanowisko można obrać w dowolnym miejscu, następnie wykonywany jest pomiar do punktów osnowy. Mierzone mogą być odległości oraz kąty tak aby możliwe było wyznaczenie współrzędnych stanowiska z obliczenia wcięcia kątowego, liniowego bądź kątowo‑liniowego. Obliczenie dokonuje się w sposób automatyczny w oprogramowaniu tachimetru. W oparciu o obliczone współrzędne stanowiska oraz współrzędne punktów tyczonych zapisanych w pamięci instrumentu mamy możliwość tyczenia punktów metodą biegunową, gdyż kąty i odległości do tyczenia obliczane są w oprogramowaniu instrumentu.
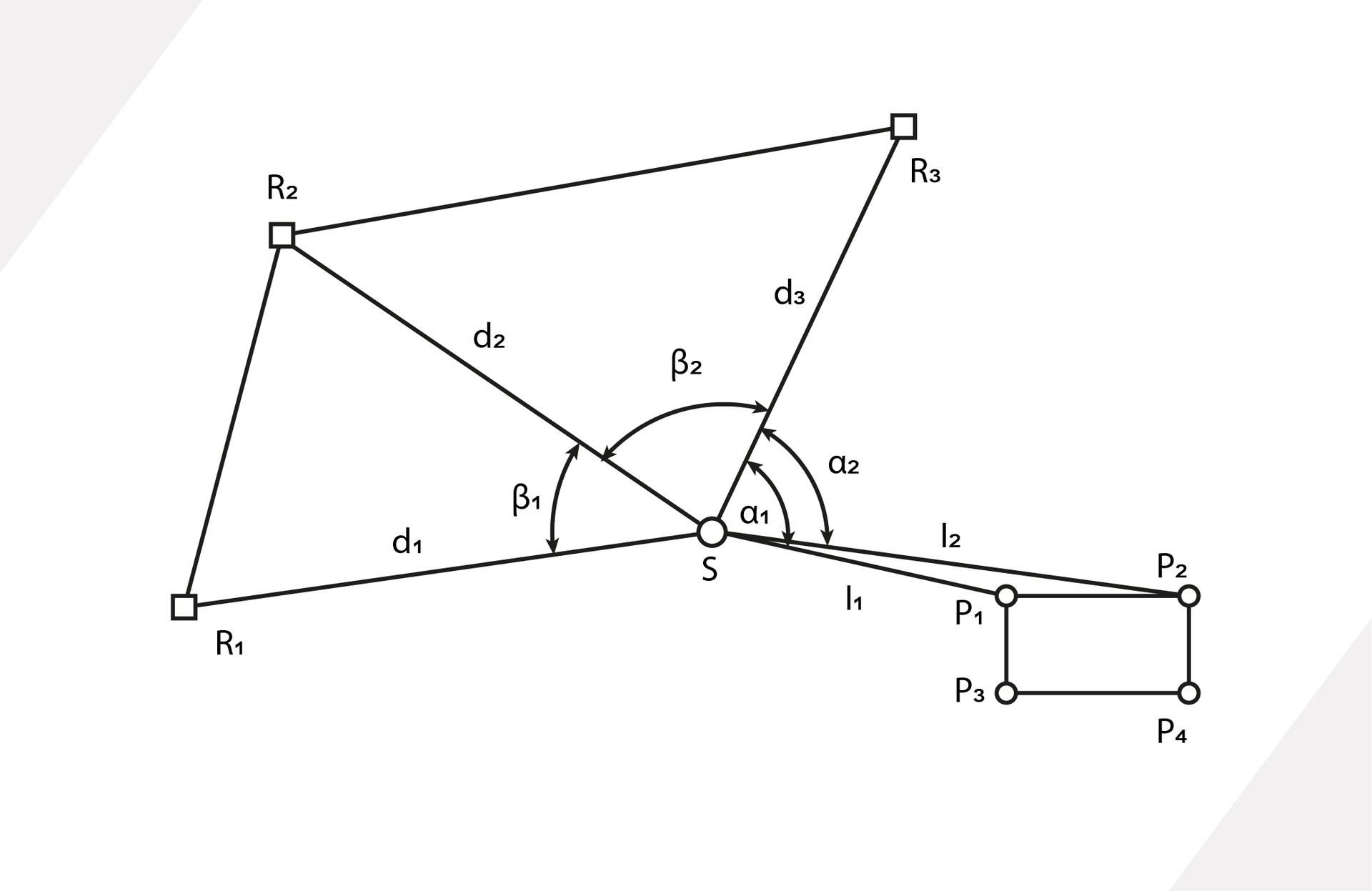
Zgodnie z powyższym rysunkiem, najpierw wybieramy lokalizację stanowiska pomiarowego S, następnie poprzez pomiar odległości dIndeks dolny 11, dIndeks dolny 22, dIndeks dolny 33 oraz kątów betaIndeks dolny 11 i betaIndeks dolny 22 do punktów osnowy realizacyjne wyznaczamy współrzędne stanowiska S. Dane do tyczenia punktów PIndeks dolny ii obliczane są automatycznie w oprogramowaniu tachimetru, wybierając do tyczenia punkt PIndeks dolny 11 otrzymujemy informację o tym jaki kąt należy odłożyć alfaIndeks dolny 11 oraz jaką odległość należy odmierzyć lIndeks dolny 11.
Jest to metoda stosowana powszechnie w pomiarach realizacyjnych, bardzo dobrze sprawdza się w dynamicznym środowisku placu budowy. Niewątpliwym atutem jest możliwość dowolnego wyboru stanowiska. Jedynym ograniczeniem jest konieczność widoczności na punkty nawiązania, tak aby można było zrealizować wcięcie wstecz. Dane do tyczenia nie muszą być przygotowane przed przyjazdem na plac budowy, generowane są one automatycznie w oprogramowaniu instrumentu.
Powrót do spisu treściPowrót do spisu treści
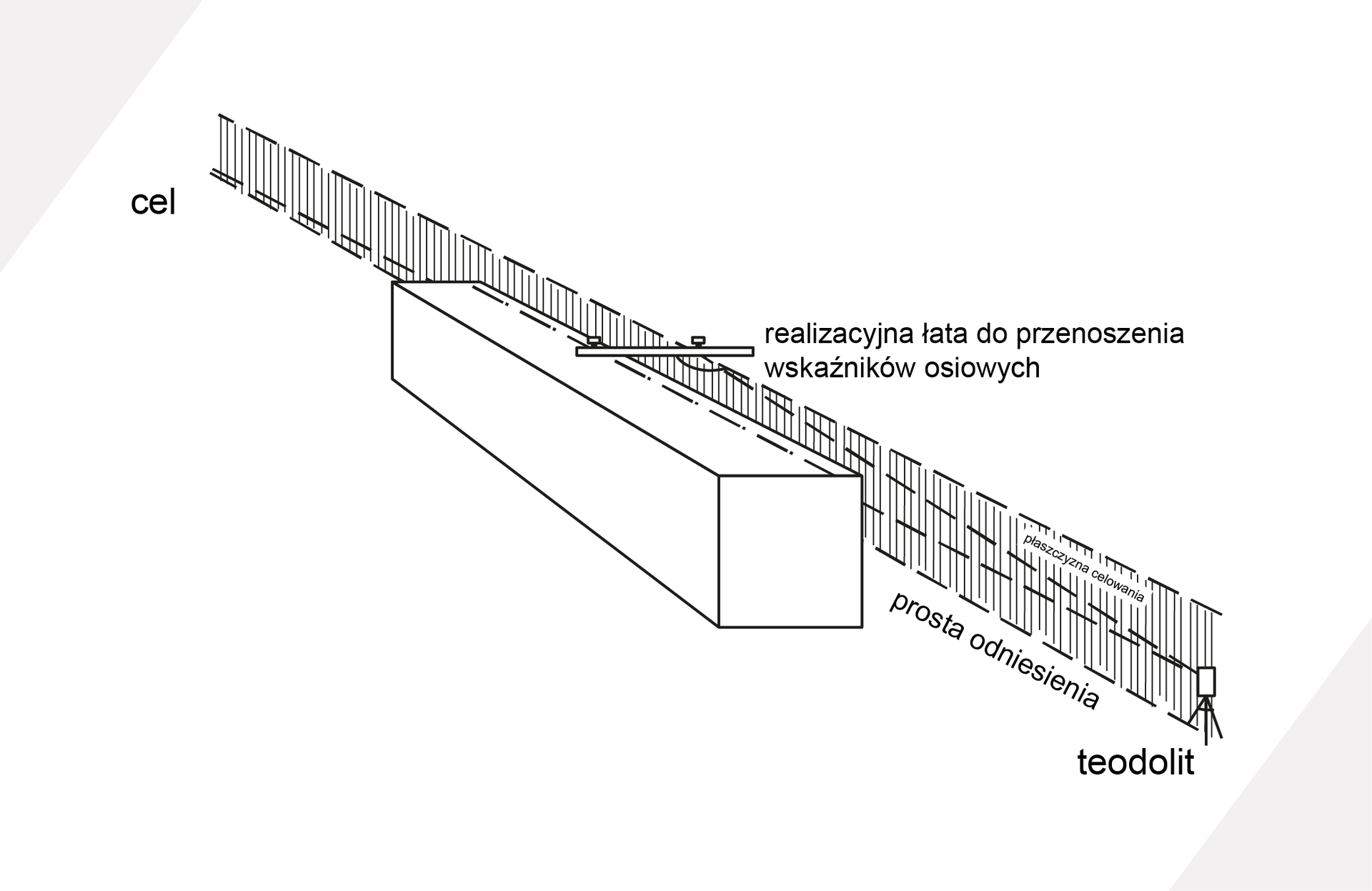
4. Metoda prostej odniesienia
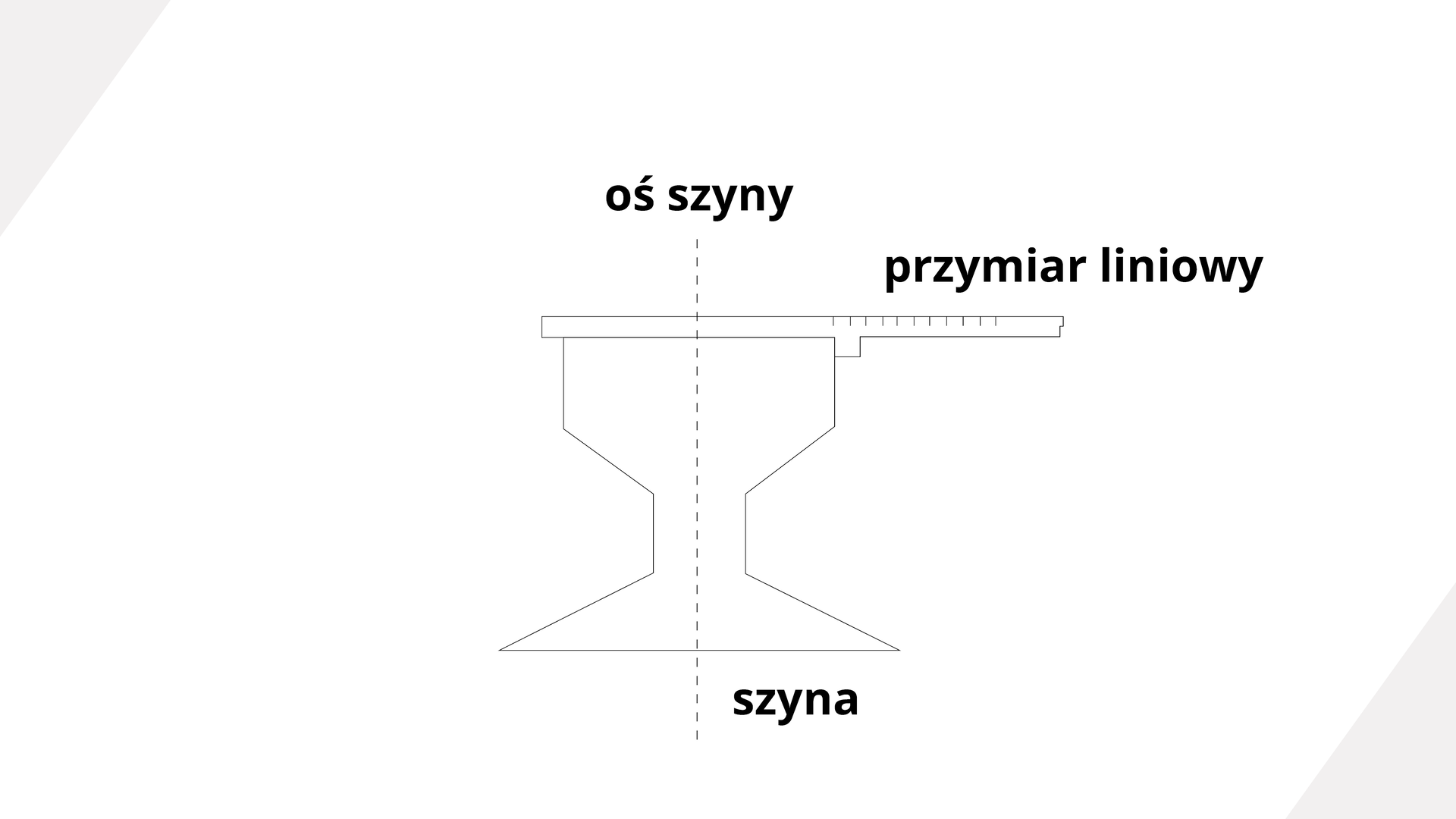
Metoda prostej odniesienia może być wykorzystywana zarówno w pomiarach realizacyjnych jak również podczas wykonywania pomiarów kontrolnych. W przypadku tyczenia obiektów, np. budynków mieszkalnych wielokondygnacyjnych metodę tę można wykorzystać podczas przenoszenia osi konstrukcyjnych budynku na kolejne poziomy. Polega ona na zrealizowaniu w terenie linii pomocniczych równoległych zarówno do osi poprzecznych jak i podłużnych odsuniętych około 1 m od zewnętrznych ścian tyczonego obiektu. Te dodatkowe linie markuje się w terenie z wykorzystaniem jednego lub dwóch znaków ziemnych. Następnie na jednym końcu linii ustawia się tarczę celowniczą na drugim zaś teodolity, celując na punkt końcowy wyznaczamy płaszczyznę odniesienia. Zmieniając tylko kąt nachylenia lunety celujemy na przymiar liniowy umieszczony na kolejnym poziomie, tak aby umożliwił on realizację stałej znanej odległości d od płaszczyzny odniesienia do wyznaczanej osi konstrukcyjnej.
Metodę tę można również z powodzeniem stosować w pomiarach kontrolnych suwnicy lub też punktów położonych na koronie zapory wzdłuż jej osi, w celu wyznaczenia odchyłek.
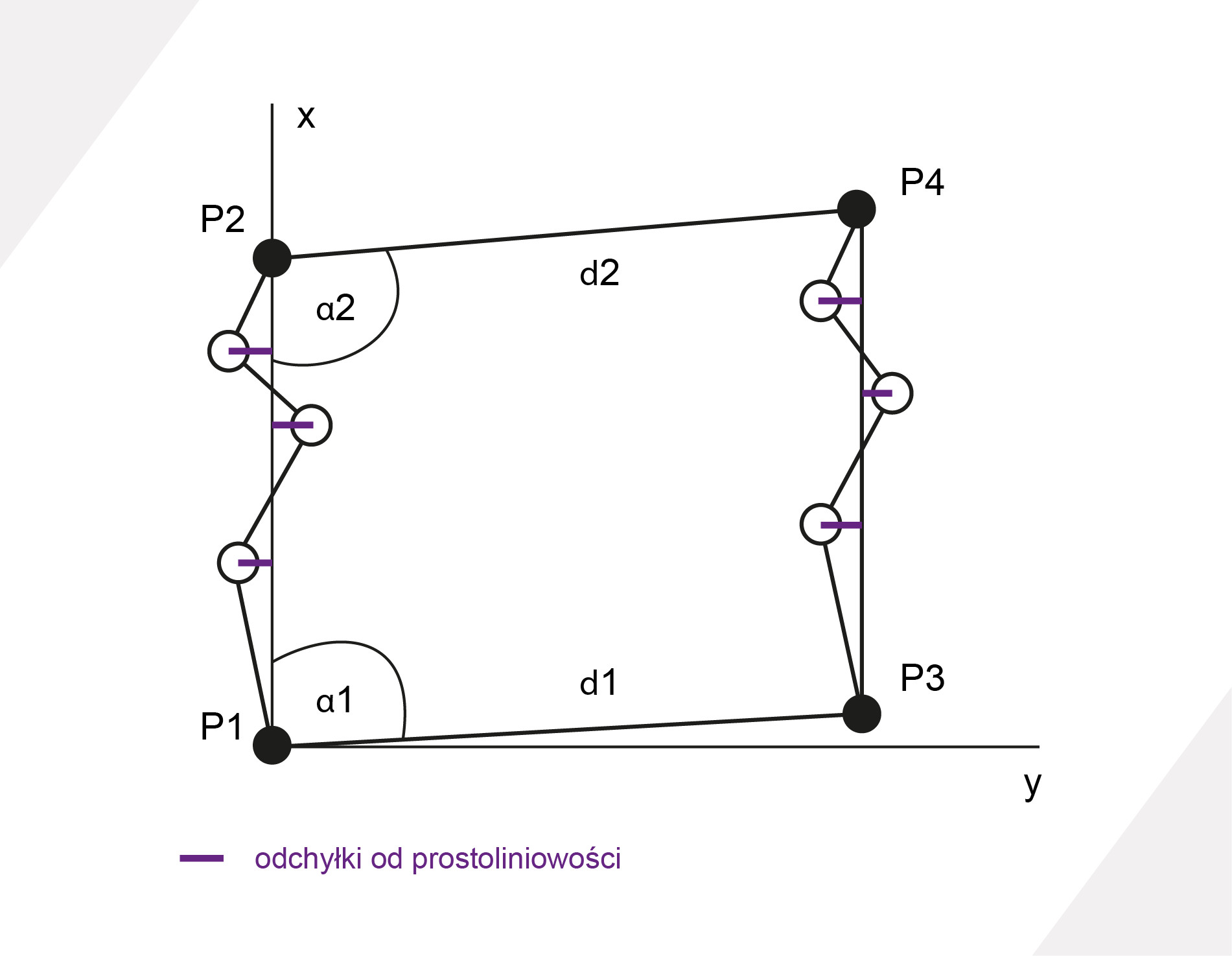
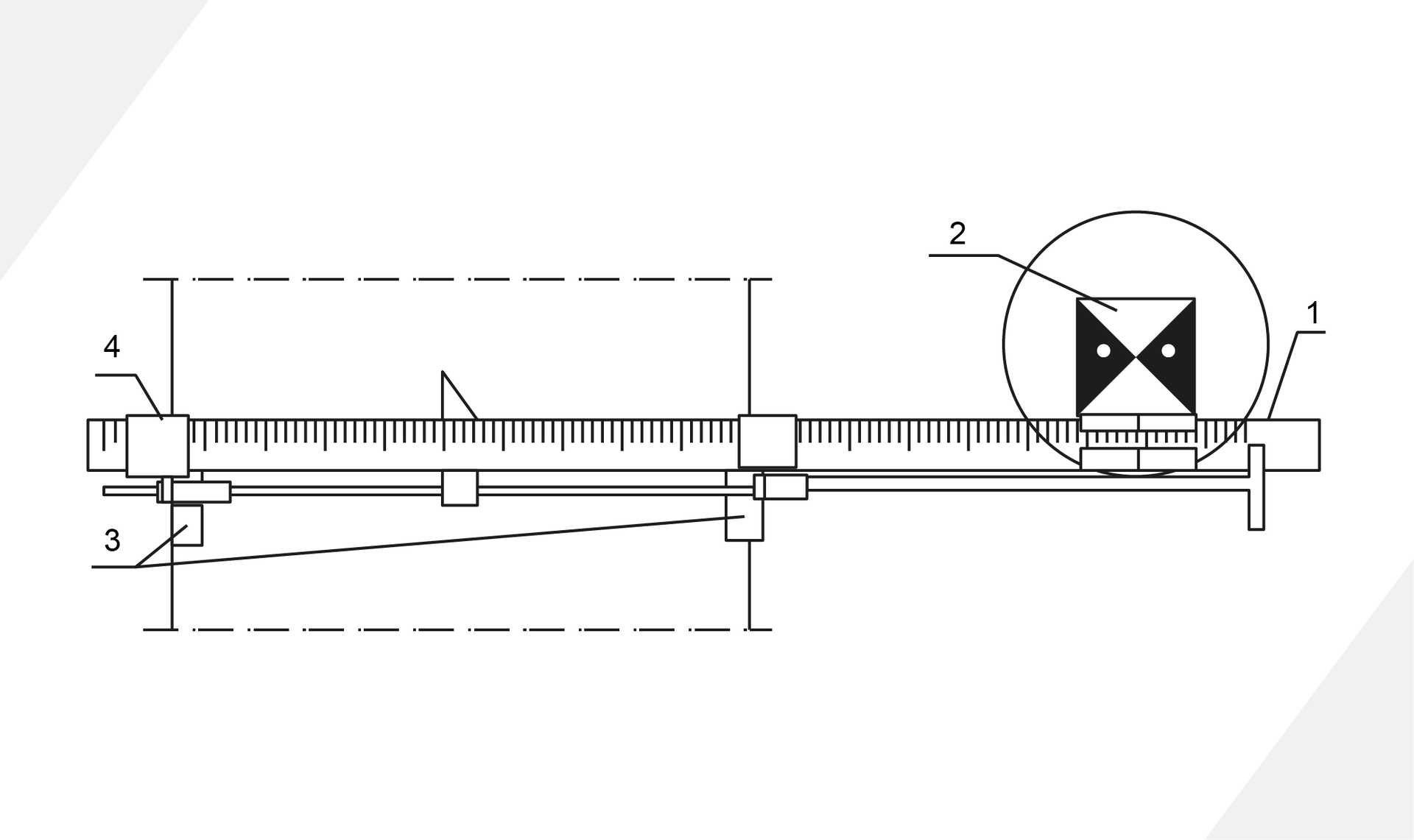
Prostą odniesienia można zrealizować z wykorzystaniem czworokąta. W tym przypadku zakładamy dwie proste odniesienia, po jednej dla każdej z szyn. W pierwszym i ostatnim przekroju oznaczamy punkty osiowe szyn, które tworzą wspomnianą prostą. W powstałym czworokącie P1,P2,P3,P4, (Rys. 2.1) dokonujemy pomiaru kątów alfa1, alfa2 oraz długości d1 oraz d2. Następnie dla każdej z szyn wykonujemy pomiar odchyleń poszczególnych punktów od prostej z wykorzystaniem przymiaru liniowego. (Rys. 2.2)
Powrót do spisu treściPowrót do spisu treści
5. Metoda rzutowania
Podobnie jak w przypadku metody prostej odniesienia, w budownictwie wielokondygnacyjnym metoda ta służy przenoszeniu osi konstrukcyjnych budynku na kolejne jego kondygnacje.
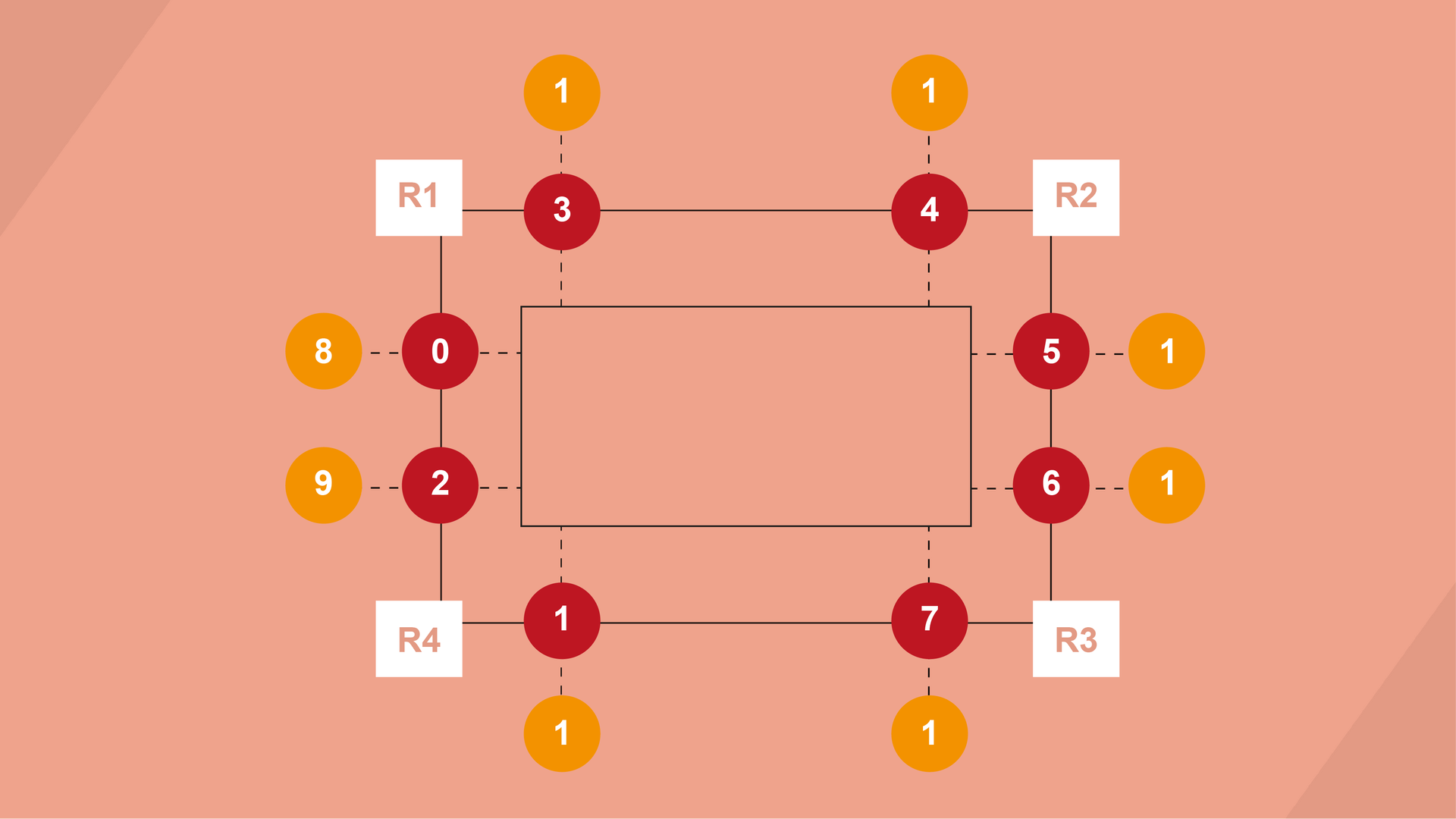
Z punktów osiowych utrwalonych na bokach ramy geodezyjnej rozwija się osnowę budowlano‑montażową. Punkty tej osnowy zastabilizowane w sposób trwały powinny się znajdować w płaszczyznach konstrukcyjnych.
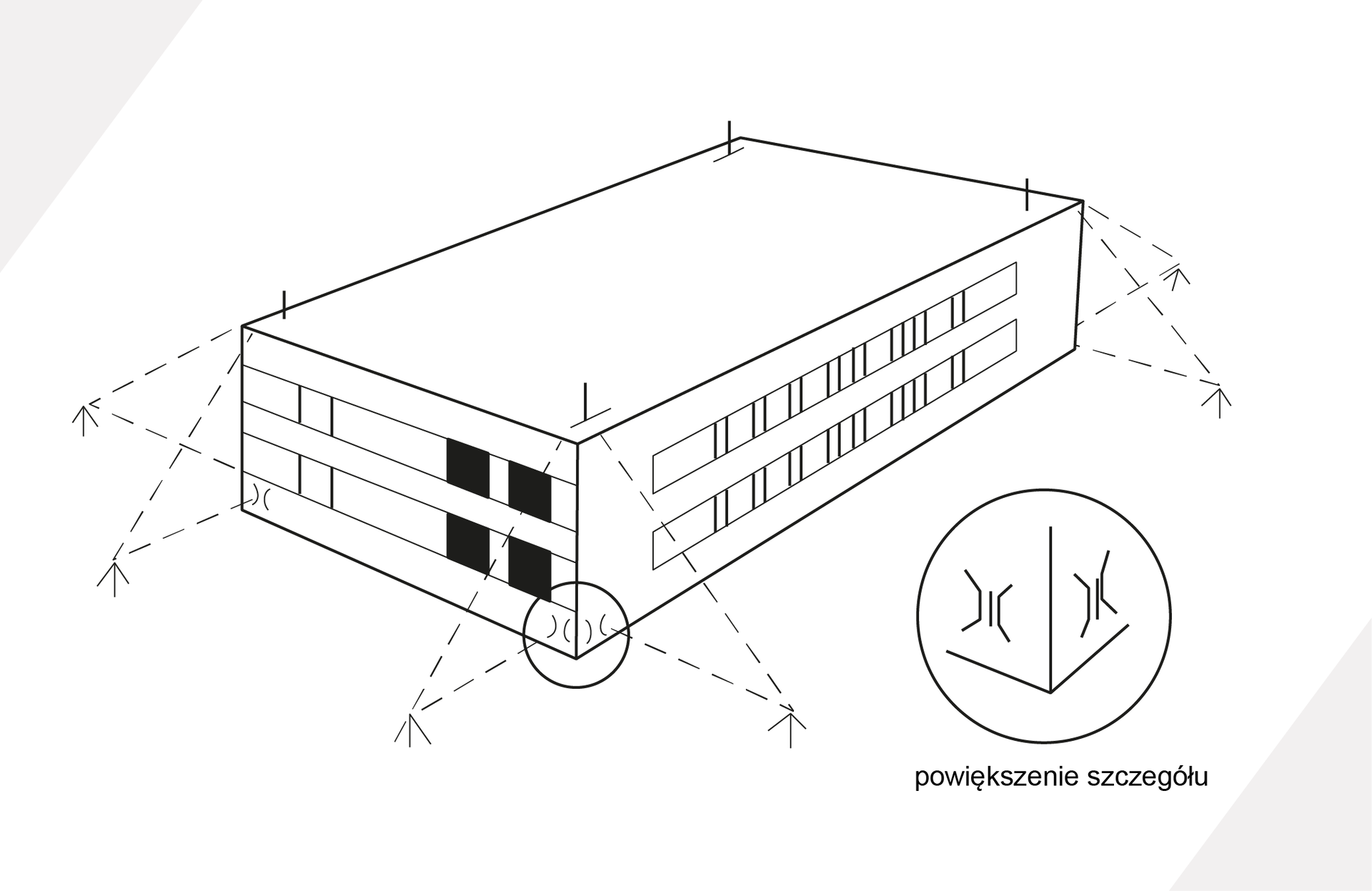
Instrumentem wykorzystywanym w tego typu pracach jest teodolit. Należy ustawić go nad punktem osnowy budowlano‑montażowej, następnie celując na wskaźnik ścienny zostaje wyznaczona płaszczyzna osi. Po wycelowaniu lunety na najwyższą kondygnację należy takie miejsce oznaczyć na krawędzi stropu. Po wyznaczeniu tej samej osi po drugiej stronie budynku można ją zrealizować fizycznie za pomocą struny stalowej.
Podczas wykorzystywania tej metody należy pamiętać o tym by odległość stanowiska od budynku była większa niż jego obecna wysokość, dzięki czemu możnas zmniejszyć potencjalny błąd wynikający z niepionowości osi teodolitu. Przy czym pamiętać trzeba o tym, że w przypadku ograniczonej przestrzeni wokół realizowanej inwestycji nie będzie można skorzystać z tej metody ze względu na brak możliwości zlokalizowania stanowisk instrumentu.
Powrót do spisu treściPowrót do spisu treści
6. Metoda przestrzennych wcięć kątowych
Jedną z metod która może być wykorzystana podczas obserwacji budowli powłokowej, np. chłodni kominowej jest metoda przestrzennych wcięć kątowych. Pomiar wykonywany jest do oznaczonych punktów na powierzchni budowli. Mogą być one oznaczone w sposób trwały z wykorzystaniem znaczków celowniczych lub sygnalizowane w trakcie wykonywania pomiaru z wykorzystaniem plamki lasera. W tym miejscu należy zaznaczyć, że trwała stabilizacja jest rzadko stosowana ze względu na koszty realizacji.
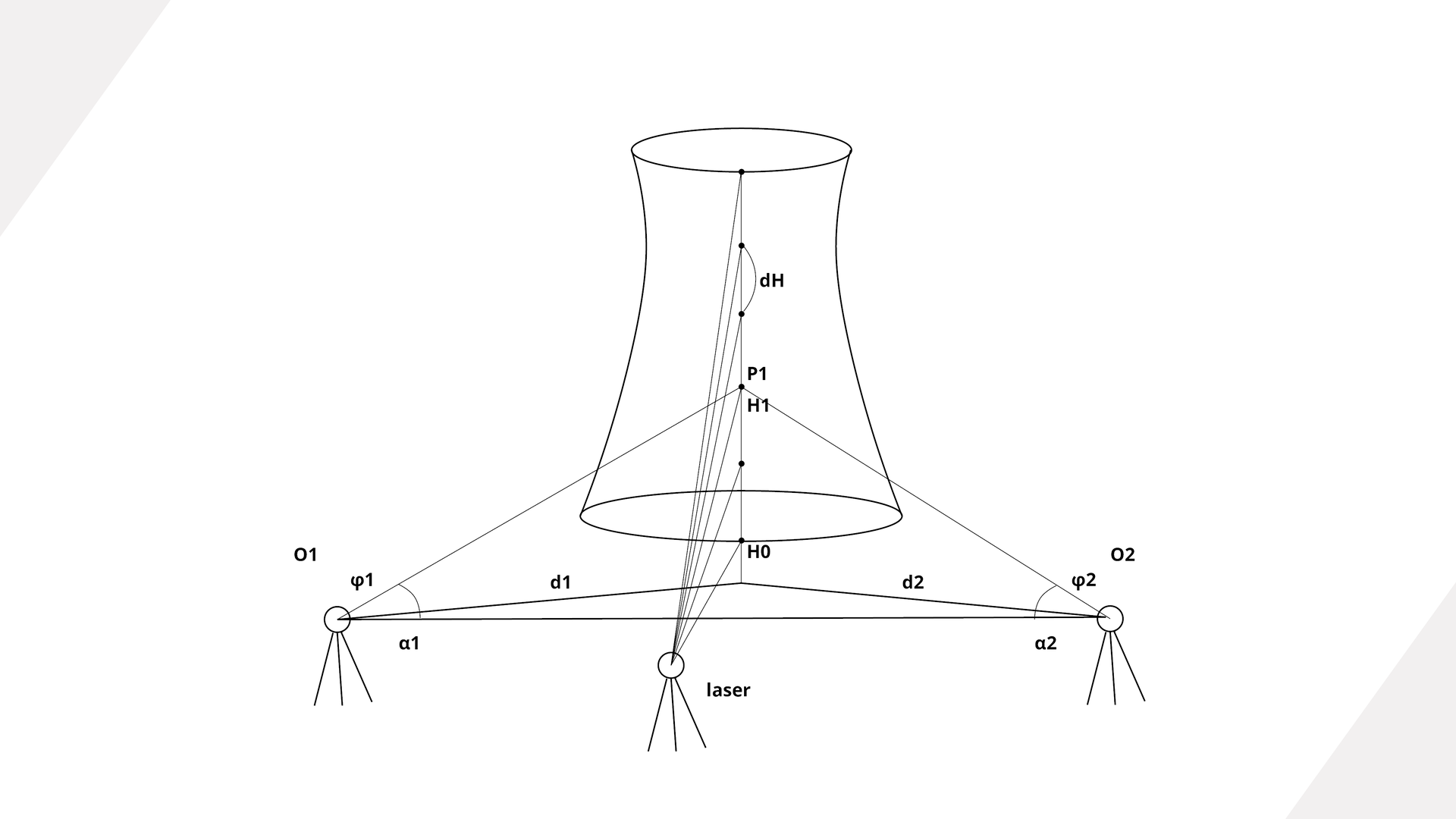
Najpierw zostaje wyznaczona wysokość punktu H0, następnie przyjęta zostaje stała różnica wysokości dH między punktami sąsiednimi. Dla każdego z nich można ustalić kąt pionowy.
Obserwacje prowadzone są z punktów O1 oraz O2 gdzie wykonywany jest pomiar kąta poziomego alfa, kąta pionowego phi oraz odległości d.
Obecnie najbardziej przydatną metodą w obserwacji budowli powłokowych jest opisana w kolejnej części metoda biegunowa 3D
Powrót do spisu treściPowrót do spisu treści
7. Metoda biegunowa 3D
Metoda ta różni się od zwykłej metody biegunowej dodatkowo pomiarem kąta pionowego co przy znanej wysokości punktu osnowy będącego stanowiskiem obserwacyjnym pozwala również na wyznaczenie wysokości mierzonego punktu.
W przypadku pomiarów kontrolnych mierzone są punkty położone w płaszczyźnie pionowej przechodzącej przez stanowisko obserwacyjne. Pomiarowi podlegają kąt poziomy pomiędzy punktem nawiązania a punktem celu, odległość do celu, oraz kąt pionowy. Oczywiście aby można było zastosować tą metodę należy wykorzystać do pomiaru tachimetr bezlustrowy.
Dodatkowo metoda ta może zostać wykorzystana z powodzeniem w pomiarach kontrolnych dotyczących jezdni podsuwnicowych. Mamy wówczas możliwość wykonywania pomiaru instrumentem bezpośrednio z poziomu posadzki.
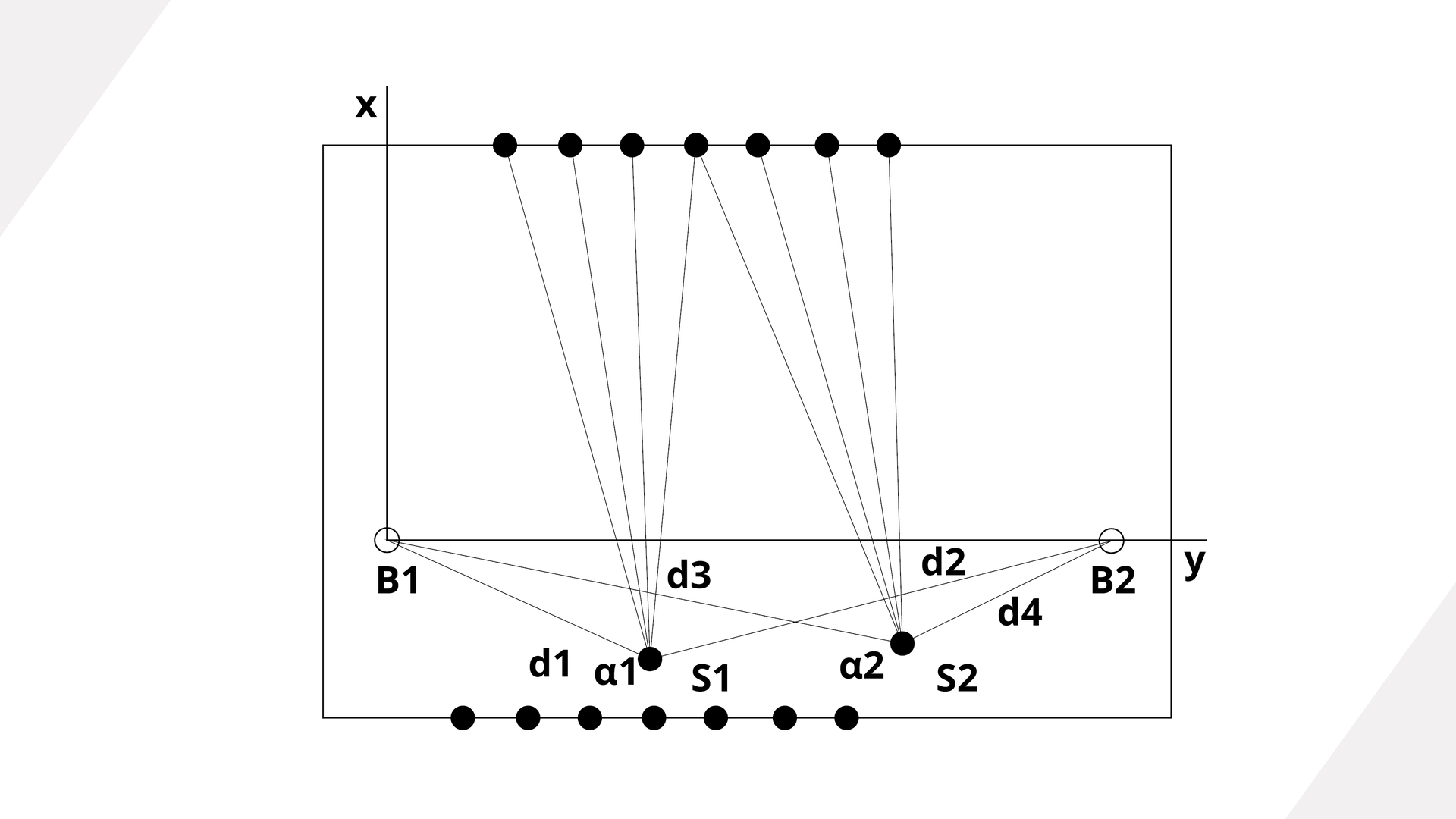
Na terenie hali/zakładu za pomocą pryzmatów oznaczana jest baza, umiejscowiona równolegle do osi głównej obiektu, tak aby oba punkty bazy (B1, B2) był widoczne z danego stanowiska obserwacyjnego (S1, S2). W celu wyznaczenia każdego punktu, tak jak wcześniej mierzony jest kąt poziomy, kąt pionowy oraz odległość do punktu.
Ponadto metoda ta jest wykorzystywana w pomiarach kontrolnych związanych z montażem dźwigarów w halach przemysłowych.
Powrót do spisu treściPowrót do spisu treści
8. Metoda trygonometryczna
Stanowi przykład tyczenia wykonywanego w dwóch etapach. W pierwszym etapie wyznacza się wstępnie punkt tyczony, w drugim wykonuje się pomiary kątów i odległości w seriach dla punktu tyczonego z dwóch znanych punktów osnowy. Otrzymane wyniki pomiarów poddaje się wyrównaniu w wyniku czego otrzymuje się poprawki trasowania. Wykorzystując obliczone poprawki zmienia się pierwotne położenie punktu na właściwe.
Metoda ta może być również wykorzystywana w pomiarach kontrolnych przy wyznaczaniu przemieszczeń poziomych, wówczas pomiary wykonywane są do punktów kontrolnych z punktów umiejscowionych poza obszarem oddziaływania.
Powrót do spisu treściPowrót do spisu treści
9. Metoda dwusiecznych kierunków stycznych
Jest to metoda wykonywania pomiarów kontrolnych wychyleń obiektów wieżowych. Polega na wyznaczeniu kątów zawartych pomiędzy kierunkiem do środka najniższego przekroju a kierunkami do środków na kolejnych poziomach obserwacyjnych. Kierunki te stanowią dwusieczne kątów pomiędzy celowymi które stanowią linie styczne do powierzchni trzonu na każdym przekroju obserwacyjnym.
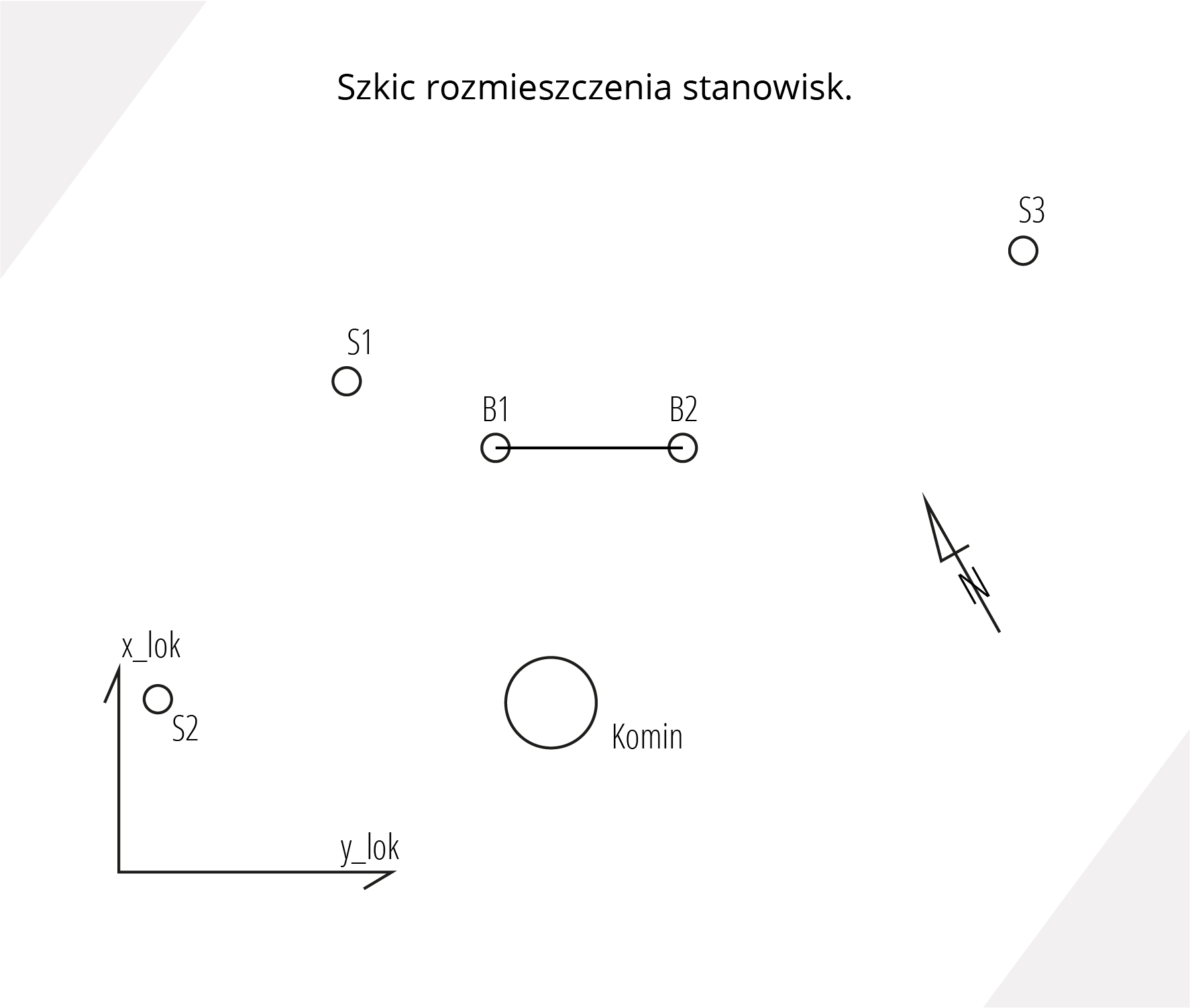
Przykład pomiarowy
Szkic rozmieszczenia stanowisk, ze względu na brak widoczności pomiędzy poszczególnymi stanowiskami obserwacyjnymi przywiązana jest do dwupunktowej bazy (B1, B2) ze współrzędnymi w układzie lokalnym
Na podstawie obserwacji obliczono kierunki do osi komina jako dwusieczną kierunków stycznych
gdzie:
i - i‑ty poziom
j - j‑te stanowisko
L, P – kierunki lewej i prawej stycznej
Następnie wyznaczono ochylenia kierunków od kierunku do poziomu 1 dla poszczególnych stanowisk
![Grafika przedstawia tabelę odchyleń kierunków do osi komina. U góry po lewej stronie nad tabelą napis: Kierunki do osi komina, zaś po lewej napis: Odchylenie kierunków w odniesieniu do poziomu 1. Poniżej w tabelki komórki z tytułami (od lewej) Poziom, St 01 [g], ST 02 [g], St 03 [g], Poziom, St 01 [cc], ST 02 [cc], St 03 [cc]. W dolnej części tabeli wpisane są poziomy oraz poszczególne wartości.
Opis prezentowanych na zdjęciu obrazów jest załączony w treści e‑booka.](https://static.zpe.gov.pl/portal/f/res-minimized/RjIClsq4BCsGH/1711015404/1yYxyxdgpJzVf9eIfomZRqJcBUvO6Dks.png)
Zestawiono równania obserwacyjne:
Wyznaczono wychylenia osi komina w poszczególnych poziomach wraz z analizą dokładności:
![Grafika przedstawia tabelę wychylenia osi komina w poszczególnych poziomach.
Widoczna jest tabela. U góry komórki z tytułami (od lewej) Poziom, Wysokość [m], wx [mm], mwx [mm], wy [mm], mwy [mm] - x i y w dolnym indeksie. W dolnej części tabeli wpisane są poziomy oraz poszczególne wartości.
Opis prezentowanych na zdjęciu obrazów jest załączony w treści e‑booka.](https://static.zpe.gov.pl/portal/f/res-minimized/R1RE6fENjibij/1711015405/4Up8DosoCHCNootm8eib9NPRrSaC6oI1.png)
Prezentacja graficzna wychylenia
Wykres wychyleń osi komina w płaszczyźnie XY
![Grafika przedstawia wykres wychyleń osi komina w płaszczyźnie XY. Widoczna jest oś XY z opisaną jednostką miary [mm]. Oś nałożona jest na pole podzielone na takiej samej wielkości kwadraty, ze skalą od -10 do 70, co dziesięć. Na osi wpisane są trzy odcinki tworzące linię łamaną. Pierwszy (1) rozpoczyna się w punkcie 0. Drugi (2) w punkcie x9/y‑5, trzeci (3) w punkcie x2/y20, czwarty (4) w punkcie x‑5/y60 i piąty (5) w punkcie x53/y20.
Opis prezentowanych na zdjęciu obrazów jest załączony w treści e‑booka.](https://static.zpe.gov.pl/portal/f/res-minimized/R1WOGQJUFVnHl/1711015405/xwNaEMQ6XU2BFIC5Ul6SptlBFMZXdGGK.png)
Wykres wychyleń osi komina w płaszczyźnie XZ
![Grafika przedstawia wykres wychyleń osi komina w płaszczyźnie XZ.
Widoczna jest oś XZ z opisaną jednostką miary [mm]. Oś nałożona jest na pole podzielone na takiej samej wielkości kwadraty, ze skalą od -10 do 100 na osi x oraz -10 do 70 na osi y, co dziesięć. Na osi wpisane są trzy odcinki tworzące linię łamaną. Pierwszy (1) rozpoczyna się w punkcie x12/y0, drugi (2) w punkcie x42/y8, trzeci (3) w punkcie x58/y2, czwarty (4) w punkcie x80/y‑5 i piąty (5) w punkcie x95/y55.
Opis prezentowanych na zdjęciu obrazów jest załączony w treści e‑booka.](https://static.zpe.gov.pl/portal/f/res-minimized/ROJq0gSPd9L1X/1711015405/NT62wpjIjDQVL8xSLqw7ZJ8vBe0Ua3w.png)
Wykres wychyleń osi komina w płaszczyźnie YZ
![Grafika przedstawia wykres wychyleń osi komina w płaszczyźnie YZ.
Widoczna jest oś YZ z opisaną jednostką miary [mm]. Oś nałożona jest na pole podzielone na takiej samej wielkości kwadraty, ze skalą od -10 do 100 na osi Z oraz -10 do 70 na osi Y, co dziesięć. Na osi wpisane są trzy odcinki tworzące linię łamaną. Pierwszy (1) rozpoczyna się w punkcie z12/y0, drugi (2) w punkcie z42/y‑5, trzeci (3) w punkcie z58/y20, czwarty (4) w punkcie x80/z60 i piąty (5) w punkcie z95/y20.
Opis prezentowanych na zdjęciu obrazów jest załączony w treści e‑booka.](https://static.zpe.gov.pl/portal/f/res-minimized/R13uYzKvOb3ye/1711015406/1V7rvXV83phrm8Oyu49QJcNlsdVb0yOY.png)
Przykładowe dane obserwacyjne kierunków dla trzech stanowisk:
S1
Cel | Seria I | Seria II | Różnica | Średnia | Średnia po redukcji |
B1 | 0,0000 | 0,0045 | -0,0045 | 0,0023 | 0,0000 |
1.1 | 13,7363 | 13,738 | -0,0017 | 13,7372 | 13,7349 |
1.2 | 17,5589 | 17,5536 | 0,0053 | 17,5563 | 17,554 |
2.1 | 14,0507 | 14,0529 | -0,0022 | 14,0518 | 14,0496 |
2.2 | 17,2336 | 17,2387 | -0,0051 | 17,2361 | 17,2339 |
3.1 | 14,1774 | 14,1761 | 0,0013 | 14,1768 | 14,1745 |
3.2 | 17,0884 | 17,0906 | -0,0022 | 17,0895 | 17,0873 |
4.1 | 14,3107 | 14,3128 | -0,002 | 14,3117 | 14,3095 |
4.2 | 16,9236 | 16,9255 | -0,0019 | 16,9245 | 16,9223 |
5.1 | 14,4376 | 14,4366 | 0,001 | 14,4371 | 14,4348 |
5.2 | 16,7865 | 16,7902 | -0,0037 | 16,7883 | 16,7861 |
S2
Cel | Seria I | Seria II | Różnica | Średnia | Średnia po redukcji |
B1 | 0,0000 | 399,992 | 0,008 | -0,0040 | 0,0000 |
1.1 | 30,5238 | 30,5225 | 0,0012 | 30,5231 | 30,5271 |
1.2 | 33,9656 | 33,9667 | -0,0011 | 33,9662 | 33,9702 |
2.1 | 30,8229 | 30,8246 | -0,0016 | 30,8237 | 30,8277 |
2.2 | 33,6568 | 33,6622 | -0,0054 | 33,6595 | 33,6635 |
3.1 | 30,9324 | 30,9337 | -0,0014 | 30,933 | 30,937 |
3.2 | 33,5606 | 33,5644 | -0,0037 | 33,5625 | 33,5665 |
4.1 | 31,0706 | 31,0705 | 0,0001 | 31,0705 | 31,0745 |
4.2 | 33,4329 | 33,4416 | -0,0087 | 33,4372 | 33,4412 |
5.1 | 31,1493 | 31,1481 | 0,0012 | 31,1487 | 31,1527 |
5.2 | 33,2755 | 33,2808 | -0,0053 | 33,2781 | 33,2821 |
S3
Cel | Seria I | Seria II | Różnica | Średnia | Średnia po redukcji |
B2 | -0,0011 | 0,0033 | -0,0044 | 0,0011 | 0,0000 |
1.1 | 394,6084 | 394,6111 | -0,0027 | 394,6097 | 394,6086 |
1.2 | 396,9453 | 396,9488 | -0,0035 | 396,9470 | 396,9460 |
2.1 | 394,8074 | 394,8116 | -0,0042 | 394,8095 | 394,8084 |
2.2 | 396,7559 | 396,7602 | -0,0043 | 396,7581 | 396,7570 |
3.1 | 394,8773 | 394,8814 | -0,0041 | 394,8793 | 394,8783 |
3.2 | 396,6742 | 396,6788 | -0,0045 | 396,6765 | 396,6754 |
4.1 | 394,9625 | 394,9674 | -0,0049 | 394,9649 | 394,9638 |
4.2 | 396,5662 | 396,5713 | -0,0051 | 396,5688 | 396,5677 |
5.1 | 395,0578 | 395,0638 | -0,0060 | 395,0608 | 395,0597 |
5.2 | 396,5103 | 396,5177 | -0,0074 | 396,5140 | 396,5120 |
Na tej podstawie obliczono zestawienie kierunków dwusiecznych oraz odchyłek od poziomu bazowego
Kierunki do osi komina | Odchylenia kierunków w odniesieniu do poziomu bazowego | ||||||
Poziom | S1 [g] | S2 [g] | S[3] g | Poziom | S1 [cc] | S2 [cc] | S3 [cc] |
1 | 1,9096 | 1,7215 | 1,1687 | 1 | 0,0 | 0,0 | 0,0 |
2 | 1,9068 | 1,7185 | 1,1741 | 2 | -27,4 | -30,2 | 53,9 |
3 | 1,8960 | 1,7246 | 1,1682 | 3 | -135,7 | 31,1 | -4,6 |
4 | 1,8810 | 1,7308 | 1,1571 | 4 | -285,7 | 92,4 | -115,4 |
5 | 1,8755 | 1,6903 | 1,1777 | 5 | -340,2 | -312,6 | 90,0 |
Po rozwiązaniu układu równań normalnych z wykorzystaniem metody najmniejszych kwadratów uzyskano następujące wartości wychyleń na poszczególnych poziomach:
Poziom | Wysokość [m] | wx [mm] | mwx [mm] | wy [mm] | mwy [mm] |
1 | 11,35 | 0,0 | 0,0 | 0,0 | 0,0 |
2 | 41,69 | 8,2 | 3,5 | -4,9 | 5,4 |
3 | 58,7 | 2,7 | 9,6 | 21,3 | 14,5 |
4 | 79,7 | -4,8 | 13,3 | 60,4 | 20,2 |
5 | 96,21 | 53,7 | 0,5 | 20,9 | 0,8 |
Powrót do spisu treściPowrót do spisu treści
10. Przykład pomiarowy dotyczący wyznaczenia ugięcia i wyboczenia dźwigara
Szkic rozmieszczenia stanowisk
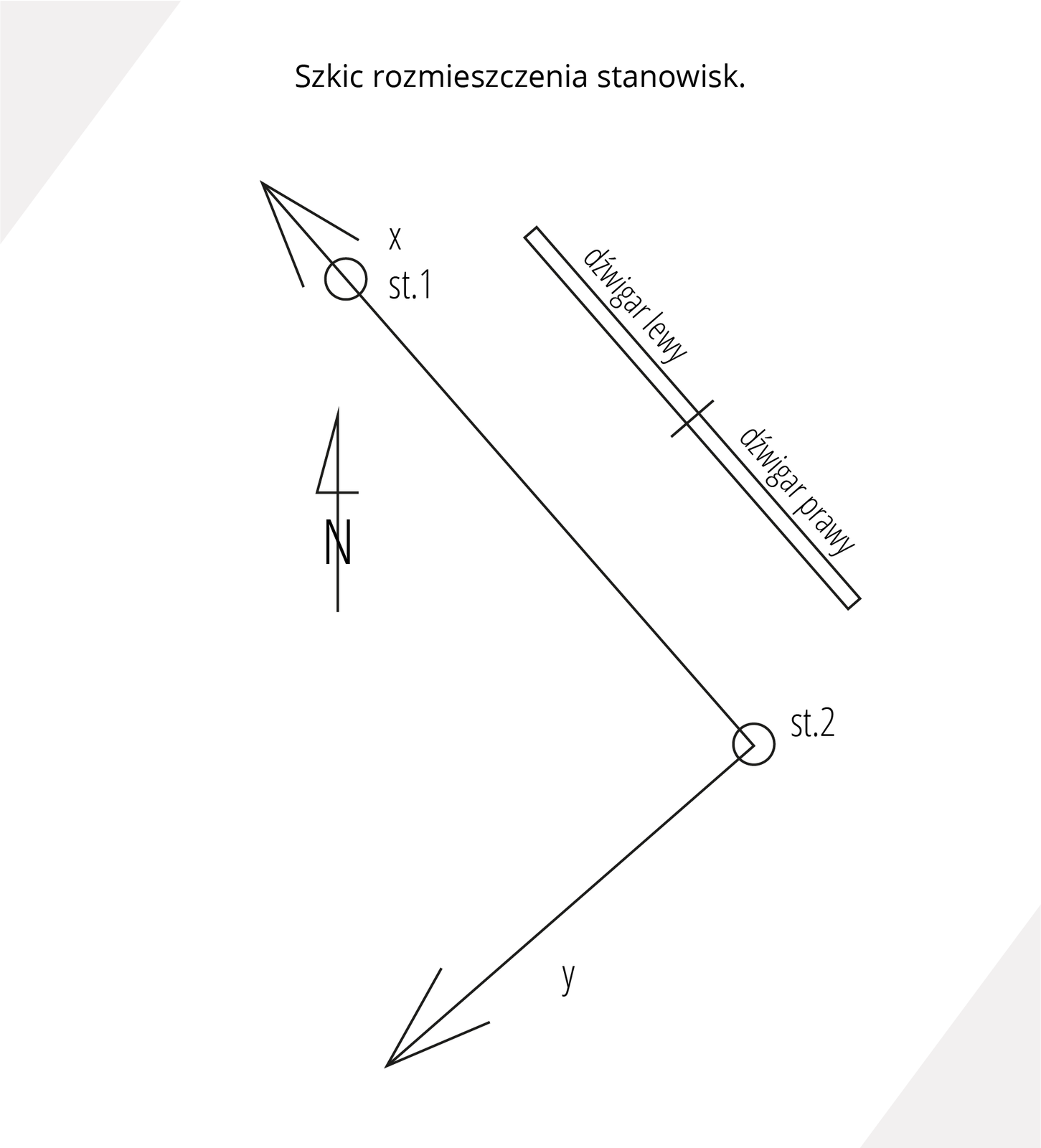
Współrzędne punktów przyjęto układzie lokalnym, dla stanowiska nr 2 (X=100.000m, Y=100.000m, H=100.000m,), na podstawie znanych wysokości instrumentów oraz pomiaru odległości obliczono współrzędne stanowiska nr 1 (X=214.393m, Y=100.000m, H=99.773m), oś X układu pokrywa się z bazą natomiast oś Y jest do niej prostopadła.
Współrzędne stanowisk | |||
|---|---|---|---|
Stanowisko | X | Y | H |
1 | 214.393 | 100.000 | 99.773 |
2 | 100.000 | 100.000 | 100.000 |
wysokości instrumentu
i1 | 1.652 |
|---|---|
i2 | 1.358 |
i2' (II seria) | 1.402 |
kąty poziome
W oparciu o obliczone kąty poziome alfa i beta dla wszystkich punktów obliczono kąt gamma:
Punkt | alfa [g] | beta [g] | gamma [g] |
|---|---|---|---|
P1 | 50.7783 | 61.2665 | 87.9552 |
P2 | 50.6926 | 61.3845 | 87.923 |
P3 | 50.6102 | 61.4934 | 87.8965 |
P4 | 50.3628 | 61.84 | 87.7973 |
P5 | 50.0409 | 62.2863 | 87.6729 |
P6 | 49.7208 | 62.7374 | 87.5419 |
P7 | 49.2129 | 63.4767 | 87.3105 |
P8 | 48.7135 | 64.222 | 87.0646 |
P9 | 48.4073 | 64.6929 | 86.8998 |
P10 | 48.1066 | 65.1493 | 86.7442 |
P11 | 47.3246 | 66.4056 | 86.2699 |
P12 | 46.4214 | 67.9435 | 85.6351 |
P13 | 45.5468 | 69.5259 | 84.9273 |
P14 | 44.7017 | 71.1386 | 84.1598 |
P15 | 43.8795 | 72.8068 | 83.3138 |
P16 | 43.087 | 74.5045 | 82.4086 |
P17 | 42.3168 | 76.2419 | 81.4413 |
P18 | 41.5701 | 78.0178 | 80.4121 |
P19 | 40.8439 | 79.8279 | 79.3282 |
P20 | 40.1413 | 81.6722 | 78.1866 |
P21 | 39.4626 | 83.544 | 76.9934 |
P22 | 38.9055 | 85.1416 | 75.9529 |
P23 | 38.699 | 85.7731 | 75.528 |
P24 | 38.4929 | 86.3849 | 75.1222 |
P25 | 38.1635 | 87.3847 | 74.4519 |
P26 | 37.841 | 88.3869 | 73.7722 |
P27 | 37.6407 | 89.0118 | 73.3476 |
P28 | 37.4435 | 89.6427 | 72.9139 |
Korzystając z twierdzenia sinusów obliczono odległości pomiędzy stanowiskami a mierzonym punktem:
gdzie: d – odległość pomiędzy stanowiskami
Następnie wyznaczono współrzędne X i Y wszystkich punktów:
lub
Odległości od stanowisk do mierzonych punktów wraz ze współrzędnymi
Punkt | b [m] | a [m] | XP_1 [m] | YP_1 [m] | XP_2 [m] | YP_2 [m] |
|---|---|---|---|---|---|---|
P1 | 83.358 | 95.571 | 147.646 | 168.400 | 147.646 | 168.400 |
P2 | 83.257 | 95.703 | 147.461 | 168.404 | 147.461 | 168.404 |
P3 | 83.158 | 95.824 | 147.288 | 168.404 | 147.288 | 168.404 |
P4 | 82.865 | 96.212 | 146.749 | 168.419 | 146.749 | 168.419 |
P5 | 82.481 | 96.708 | 146.054 | 168.427 | 146.054 | 168.427 |
P6 | 82.099 | 97.206 | 145.357 | 168.433 | 145.357 | 168.433 |
P7 | 81.495 | 98.019 | 144.232 | 168.448 | 144.232 | 168.448 |
P8 | 80.901 | 98.831 | 143.111 | 168.458 | 143.111 | 168.458 |
P9 | 80.538 | 99.342 | 142.412 | 168.467 | 142.412 | 168.467 |
P10 | 80.179 | 99.832 | 141.733 | 168.462 | 141.733 | 168.462 |
P11 | 79.254 | 101.176 | 139.908 | 168.473 | 139.908 | 168.473 |
P12 | 78.198 | 102.800 | 137.733 | 168.492 | 137.733 | 168.492 |
P13 | 77.190 | 104.449 | 135.555 | 168.514 | 135.555 | 168.514 |
P14 | 76.232 | 106.105 | 133.388 | 168.531 | 133.388 | 168.531 |
P15 | 75.322 | 107.796 | 131.205 | 168.555 | 131.205 | 168.555 |
P16 | 74.470 | 109.495 | 129.033 | 168.578 | 129.033 | 168.578 |
P17 | 73.669 | 111.211 | 126.859 | 168.599 | 126.859 | 168.599 |
P18 | 72.925 | 112.945 | 124.683 | 168.621 | 124.683 | 168.621 |
P19 | 72.234 | 114.692 | 122.507 | 168.638 | 122.507 | 168.638 |
P20 | 71.606 | 116.455 | 120.331 | 168.659 | 120.331 | 168.659 |
P21 | 71.044 | 118.229 | 118.160 | 168.684 | 118.160 | 168.684 |
P22 | 70.616 | 119.732 | 116.332 | 168.701 | 116.332 | 168.701 |
P23 | 70.477 | 120.330 | 115.619 | 168.724 | 115.619 | 168.724 |
P24 | 70.331 | 120.901 | 114.927 | 168.729 | 114.927 | 168.729 |
P25 | 70.111 | 121.834 | 113.803 | 168.739 | 113.803 | 168.739 |
P26 | 69.912 | 122.767 | 112.683 | 168.752 | 112.683 | 168.752 |
P27 | 69.791 | 123.346 | 111.986 | 168.754 | 111.986 | 168.754 |
P28 | 69.681 | 123.931 | 111.287 | 168.761 | 111.287 | 168.761 |
Wyboczenia dla obu filarów wyznaczono w oparciu o wzór:
gdzie:
– różnica współrzędnych kolejnych punktów względem początku dźwigara wzdłuż osi y
- różnica współrzędnych kolejnych punktów względem początku dźwigara wzdłuż osi x
- różnica współrzędnych końca i początku dźwigara wzdłuż osi y
- różnica współrzędnych końca i początku dźwigara wzdłuż osi x
- punkt końcowy dźwigara
- punkt początkowy dźwigara
różnice wzdłuż osi x oraz osi y dla dźwigara
Punkt | deltaxi [m] | deltayi [m] |
|---|---|---|
P1 | 0.000 | 0.000 |
P2 | -0.185 | 0.004 |
P3 | -0.358 | 0.004 |
P4 | -0.897 | 0.019 |
P5 | -1.592 | 0.027 |
P6 | -2.289 | 0.033 |
P7 | -3.414 | 0.048 |
P8 | -4.535 | 0.058 |
P9 | -5.234 | 0.067 |
P10 | -5.913 | 0.062 |
P11 | -7.738 | 0.073 |
P12 | -9.913 | 0.092 |
P13 | -12.091 | 0.114 |
P14 | -14.258 | 0.131 |
P15 | -16.441 | 0.155 |
P16 | -18.613 | 0.178 |
P17 | -20.787 | 0.199 |
P18 | -22.963 | 0.221 |
P19 | -25.139 | 0.238 |
P20 | -27.315 | 0.259 |
P21 | -29.486 | 0.284 |
P22 | -31.314 | 0.301 |
P23 | -32.027 | 0.324 |
P24 | -32.719 | 0.329 |
P25 | -33.843 | 0.339 |
P26 | -34.963 | 0.352 |
P27 | -35.660 | 0.354 |
P28 | -36.359 | 0.361 |
różnice współrzędnych pomiędzy punktem końcowym a początkowym dźwigara
deltayIndeks dolny BABA= 0.361 m
deltaxIndeks dolny BABA = -36.359 m
zestawienie obliczonych wartości wyboczeń:
Punkt | P |
|---|---|
wi [mm] | |
1 | 0 |
2 | -2 |
3 | 0 |
4 | -10 |
5 | -11 |
6 | -10 |
7 | -14 |
8 | -13 |
9 | -15 |
10 | -3 |
11 | 4 |
12 | 6 |
13 | 6 |
14 | 11 |
15 | 8 |
16 | 7 |
17 | 7 |
18 | 7 |
19 | 12 |
20 | 12 |
21 | 9 |
22 | 10 |
23 | -6 |
24 | -4 |
25 | -3 |
26 | -5 |
27 | 0 |
28 | 0 |
kąty zenitalne V dla dźwigara
Punkt | phi1 [g] | phi2.1 [g] | phi2.2 [g] |
|---|---|---|---|
P1 | 96.1373 | 95.5408 | 95.5762 |
P2 | 96.1407 | 95.5332 | 95.5685 |
P3 | 96.1449 | 95.5268 | 95.5617 |
P4 | 96.1567 | 95.5116 | 95.5436 |
P5 | 96.1708 | 95.4842 | 95.5171 |
P6 | 96.2474 | 95.5321 | 95.5700 |
P7 | 96.3766 | 95.6197 | 95.6527 |
P8 | 96.5110 | 95.7081 | 95.7497 |
P9 | 96.5889 | 95.7680 | 95.8070 |
P10 | 96.6693 | 95.8201 | 95.8584 |
P11 | 96.7104 | 95.7702 | 95.8073 |
P12 | 96.7610 | 95.7111 | 95.7493 |
P13 | 96.8081 | 95.6516 | 95.6880 |
P14 | 96.8568 | 95.5954 | 95.6349 |
P15 | 96.9055 | 95.5418 | 95.5795 |
P16 | 96.9517 | 95.4880 | 95.5269 |
P17 | 96.9996 | 95.4418 | 95.4786 |
P18 | 97.0459 | 95.3930 | 95.4356 |
P19 | 97.0919 | 95.3532 | 95.3922 |
P20 | 97.1375 | 95.3120 | 95.3537 |
P21 | 97.1812 | 95.2774 | 95.3179 |
P22 | 97.2160 | 95.2487 | 95.2900 |
P23 | 97.1802 | 95.1558 | 95.1958 |
P24 | 97.1440 | 95.0607 | 95.1007 |
P25 | 97.0825 | 94.9018 | 94.9403 |
P26 | 97.0252 | 94.7493 | 94.7886 |
P27 | 96.9928 | 94.6566 | 94.6970 |
P28 | 97.0098 | 94.6552 | 94.6963 |
Na podstawie uśrednionych kątów zenitalnych V oraz obliczonych wcześniej odległości od stanowisk do mierzonych punktów obliczono poszczególne przewyższenia:
W tym miejscu należy zaznaczyć, że w przypadku dźwigara dla stanowiska nr 2 uzyskano dla każdego z punktów dwa niezależne przewyższenia, ponieważ kąty zenitalne V pionowe nie mogły zostać uśrednione ze względu na różną wysokość stanowisk, w efekcie czego uśredniono dopiero obliczone wartości przewyższeń.
Wysokości poszczególnych punktów obliczono w oparciu o poniższe wzory:
gdzie:
i, i’ – wysokość instrumentu na poszczególnych stanowiskach
hIndeks dolny ii – wysokości poszczególnych punktów
Odchyłki uzyskano w wyniku różnic wysokości, na ich podstawie wyznaczono błąd, który posłużył do obliczenia średnich błędów ugięcia każdego punktu.
gdzie:
n – liczba mierzonych punktów
f – różnica wysokości
zestawienie obliczonych przewyższeń, wysokości, odchyłek oraz ostatecznej wysokości punktu dla dźwigara
Pkt | deltahi [m] | deltahi'2.1 [m] | deltahi'2.2 [m] | h'i [m] | h”i2.1 [m] | h”i2.2 [m] | h”i [m] | f [m] | hi [m] |
|---|---|---|---|---|---|---|---|---|---|
P1 | 5.806 | 5.848 | 5.802 | 107.204 | 107.206 | 107.204 | 107.205 | -0.001 | 107.205 |
P2 | 5.809 | 5.851 | 5.805 | 107.207 | 107.209 | 107.207 | 107.208 | -0.001 | 107.208 |
P3 | 5.810 | 5.853 | 5.807 | 107.208 | 107.211 | 107.209 | 107.210 | -0.002 | 107.209 |
P4 | 5.816 | 5.852 | 5.810 | 107.214 | 107.210 | 107.212 | 107.211 | 0.003 | 107.213 |
P5 | 5.824 | 5.861 | 5.818 | 107.222 | 107.219 | 107.220 | 107.219 | 0.003 | 107.221 |
P6 | 5.737 | 5.771 | 5.722 | 107.135 | 107.129 | 107.124 | 107.127 | 0.008 | 107.131 |
P7 | 5.585 | 5.616 | 5.574 | 106.983 | 106.974 | 106.976 | 106.975 | 0.008 | 106.979 |
P8 | 5.422 | 5.462 | 5.409 | 106.820 | 106.820 | 106.811 | 106.816 | 0.004 | 106.818 |
P9 | 5.328 | 5.362 | 5.312 | 106.727 | 106.720 | 106.714 | 106.717 | 0.010 | 106.722 |
P10 | 5.228 | 5.272 | 5.223 | 106.626 | 106.630 | 106.625 | 106.628 | -0.001 | 106.627 |
P11 | 5.233 | 5.274 | 5.227 | 106.631 | 106.632 | 106.629 | 106.630 | 0.001 | 106.631 |
P12 | 5.235 | 5.276 | 5.229 | 106.633 | 106.634 | 106.631 | 106.633 | 0.001 | 106.633 |
P13 | 5.241 | 5.281 | 5.236 | 106.640 | 106.639 | 106.638 | 106.638 | 0.001 | 106.639 |
P14 | 5.243 | 5.283 | 5.235 | 106.641 | 106.641 | 106.637 | 106.639 | 0.003 | 106.640 |
P15 | 5.244 | 5.283 | 5.239 | 106.642 | 106.641 | 106.641 | 106.641 | 0.001 | 106.642 |
P16 | 5.247 | 5.287 | 5.241 | 106.645 | 106.645 | 106.643 | 106.644 | 0.001 | 106.645 |
P17 | 5.245 | 5.284 | 5.241 | 106.644 | 106.642 | 106.643 | 106.642 | 0.001 | 106.643 |
P18 | 5.245 | 5.287 | 5.238 | 106.643 | 106.645 | 106.640 | 106.642 | 0.001 | 106.643 |
P19 | 5.243 | 5.282 | 5.237 | 106.641 | 106.640 | 106.639 | 106.640 | 0.002 | 106.640 |
P20 | 5.240 | 5.283 | 5.235 | 106.638 | 106.641 | 106.637 | 106.639 | -0.001 | 106.639 |
P21 | 5.238 | 5.280 | 5.234 | 106.637 | 106.638 | 106.636 | 106.637 | 0.000 | 106.637 |
P22 | 5.239 | 5.280 | 5.234 | 106.638 | 106.638 | 106.636 | 106.637 | 0.001 | 106.637 |
P23 | 5.333 | 5.373 | 5.329 | 106.732 | 106.731 | 106.731 | 106.731 | 0.001 | 106.731 |
P24 | 5.428 | 5.468 | 5.423 | 106.826 | 106.826 | 106.825 | 106.825 | 0.000 | 106.826 |
P25 | 5.587 | 5.627 | 5.584 | 106.986 | 106.985 | 106.986 | 106.985 | 0.000 | 106.986 |
P26 | 5.741 | 5.779 | 5.736 | 107.139 | 107.137 | 107.138 | 107.138 | 0.002 | 107.138 |
P27 | 5.831 | 5.872 | 5.827 | 107.229 | 107.230 | 107.229 | 107.229 | 0.000 | 107.229 |
P28 | 5.825 | 5.864 | 5.819 | 107.224 | 107.222 | 107.221 | 107.221 | 0.002 | 107.223 |
błąd średni ugięcia
dźwigar mIndeks dolny deltah Indeks dolny koniecdeltah= 3.3 [mm]
zestawienie różnic wysokości* *różnica wysokości kolejnych punktów dźwigara
Punkt | P |
|---|---|
deltaui [m] | |
1 | 0.000 |
2 | 0.003 |
3 | 0.004 |
4 | 0.008 |
5 | 0.016 |
6 | -0.074 |
7 | -0.226 |
8 | -0.387 |
9 | -0.483 |
10 | -0.578 |
11 | -0.574 |
12 | -0.572 |
13 | -0.566 |
14 | -0.565 |
15 | -0.563 |
16 | -0.560 |
17 | -0.562 |
18 | -0.562 |
19 | -0.564 |
20 | -0.566 |
21 | -0.568 |
22 | -0.567 |
23 | -0.473 |
24 | -0.379 |
25 | -0.219 |
26 | -0.066 |
27 | 0.025 |
28 | 0.018 |
różnica wysokości punktów początkowego i końcowego
dźwigar
Ugięcia dźwigarów obliczono ze wzoru:
gdzie:
– różnica wysokości kolejnych punktów dźwigara
- różnica współrzędnych kolejnych punktów względem początku dźwigara wzdłuż osi x
- różnica wysokości pomiędzy punktem końcowym dźwigara a początkowym
- różnica współrzędnych końca i początku dźwigara wzdłuż osi x
- punkt końcowy dźwigara
- punkt początkowy dźwigara
W oparciu o podany poniżej wzór wyznaczono błędy poszczególnych ugięć:
Punkt | P | mui [mm] |
|---|---|---|
ui [mm] | ||
1 | 0 | 3.3 |
2 | -3 | 3.3 |
3 | -4 | 3.3 |
4 | -7 | 3.4 |
5 | -15 | 3.6 |
6 | 1 | 3.3 |
7 | 2 | 3.3 |
8 | 2 | 3.3 |
9 | 3 | 3.3 |
10 | -1 | 3.3 |
11 | -4 | 3.3 |
12 | -5 | 3.3 |
13 | -10 | 3.4 |
14 | -10 | 3.4 |
15 | -10 | 3.4 |
16 | -12 | 3.5 |
17 | -10 | 3.4 |
18 | -8 | 3.4 |
19 | -5 | 3.3 |
20 | -2 | 3.3 |
21 | 1 | 3.3 |
22 | 1 | 3.3 |
23 | -2 | 3.3 |
24 | -2 | 3.3 |
25 | -1 | 3.3 |
26 | -1 | 3.3 |
27 | -7 | 3.4 |
28 | 0 | 3.3 |
Ostatecznym etapem jest sporządzenie szkiców ugięć oraz wyboczeń dla dźwigara, skala dla obu osi powinna być zróżnicowana tak aby dobrze zaprezentować obliczone wartości, przykłady poniżej:
![Grafika przedstawia wykres ugięć dźwigara.
Widoczna jest oś X w poziomie z jednostką [m], zamknięta po prawej i lewej stronie pionowymi liniami ze skalą od -20 do 15 na górze, co pięć. Przy prawej linii napis U oraz jednostka [mm]. Pomiędzy liniami ze skalą, przy każdej wartości, biegną poziome linie przerywane. Od pogrubione lini biegnącej na wartości zero, odchodzą w górę i w dół krótkie odcinki, zakończone małymi okręgami, podpisane od P1 do P.28 Z prawej, górnej strony legenda: Skala x - 1:200, Skala u - 2:1.
Opis prezentowanych na zdjęciu obrazów jest załączony w treści e‑booka.](https://static.zpe.gov.pl/portal/f/res-minimized/R3OZIgb5KzWnY/1711015407/u5r6f2zKRBl1VgWXDt3fyLZAj8BJ3YPA.png)
![Grafika przedstawia wykres wyboczeń dźwigara.
Widoczna jest oś X w poziomie z jednostką [m], zamknięta po prawej i lewej stronie pionowymi liniami ze skalą od 20 do -15 na górze, co pięć. Przy prawej linii napis U oraz jednostka [mm]. Pomiędzy liniami ze skalą, przy każdej wartości, biegną poziome linie przerywane. Od pogrubione lini biegnącej na wartości zero, odchodzą w górę i w dół krótkie odcinki, zakończone małymi okręgami, podpisane od P1 do P.28 Z prawej, górnej strony legenda: Skala x - 1:200, Skala u - 2:1.
Opis prezentowanych na zdjęciu obrazów jest załączony w treści e‑booka.](https://static.zpe.gov.pl/portal/f/res-minimized/RzcwXZa7BRwOI/1711015407/mDSsglBJJc72EZuGgEWMhRuFNbWhBYqb.png)
DANE DO PRZELICZEŃ WŁASNYCH:
Wysokości instrumentu na poszczególnych stanowiskach, współrzędne stanowisk takie jak w powyższym przykładzie obliczeniowym
i1 | 1.652 |
|---|---|
i2 | 1.358 |
Kąty poziome
Punkt | alfa [g] | beta [g] |
|---|---|---|
L1 | 74.4494 | 42.8018 |
L2 | 74.3090 | 42.8665 |
L3 | 74.1658 | 42.9337 |
L4 | 73.7490 | 43.1364 |
L5 | 73.2115 | 43.3944 |
L6 | 72.6736 | 43.6543 |
L7 | 71.8097 | 44.0895 |
L8 | 70.9601 | 44.5264 |
L9 | 70.4423 | 44.7996 |
L10 | 69.9280 | 45.0647 |
L11 | 68.5932 | 45.8053 |
L12 | 67.0454 | 46.7093 |
L13 | 65.5395 | 47.6456 |
L14 | 64.0767 | 48.6097 |
L15 | 62.6573 | 49.6043 |
L16 | 61.2751 | 50.6339 |
L17 | 59.9384 | 51.6922 |
L18 | 58.6364 | 52.7903 |
L19 | 57.3788 | 53.9148 |
L20 | 56.1581 | 55.0854 |
L21 | 54.9786 | 56.2869 |
L22 | 54.0219 | 57.3197 |
L23 | 53.6595 | 57.7455 |
L24 | 53.3005 | 58.1522 |
L25 | 52.7279 | 58.8198 |
L26 | 52.1723 | 59.4912 |
L27 | 51.8271 | 59.9171 |
L28 | 51.4898 | 60.3461 |
Kąty zenitalne V
Punkt | phi1 [g] | phi2 [g] |
|---|---|---|
L1 | 94.9753 | 96.5694 |
L2 | 94.9794 | 96.5684 |
L3 | 94.9840 | 96.5623 |
L4 | 94.9990 | 96.5513 |
L5 | 95.0189 | 96.5340 |
L6 | 95.1103 | 96.5707 |
L7 | 95.2754 | 96.6378 |
L8 | 95.4419 | 96.7077 |
L9 | 95.5422 | 96.7490 |
L10 | 95.6231 | 96.7733 |
L11 | 95.6719 | 96.7323 |
L12 | 95.7282 | 96.6734 |
L13 | 95.7862 | 96.6241 |
L14 | 95.8474 | 96.5696 |
L15 | 95.9065 | 96.5133 |
L16 | 95.9682 | 96.4560 |
L17 | 96.0264 | 96.3962 |
L18 | 96.0887 | 96.3433 |
L19 | 96.1507 | 96.2873 |
L20 | 96.2150 | 96.2342 |
L21 | 96.2755 | 96.1781 |
L22 | 96.3263 | 96.1292 |
L23 | 96.2971 | 96.0601 |
L24 | 96.2472 | 95.9714 |
L25 | 96.1684 | 95.8295 |
L26 | 96.0926 | 95.6711 |
L27 | 96.0565 | 95.5874 |
L28 | 96.0758 | 95.5627 |
Źródła wykorzystane do przygotowania e‑booka:
Gocał J., Geodezja inżynieryjno‑przemysłowa, Wydawnictwo AGH 2010.
Jagielski A., Podstawy geodezji inżynieryjnej - standardy, pomiary realizacyjne, trasy, objętości, Geodpis 2012.
Powiązane materiały
Sekwencje filmowe – Pomiary realizacyjne i kontrolne obiektów budowlanychSekwencje filmowe – Pomiary realizacyjne i kontrolne obiektów budowlanych
Wizualizacja – Charakterystyczne punkty obiektów inżynierskichWizualizacja – Charakterystyczne punkty obiektów inżynierskich
Program ćwiczeniowy do projektowania – Lokalizacja punktów osnowy realizacyjnej i punktów kontrolnychProgram ćwiczeniowy do projektowania – Lokalizacja punktów osnowy realizacyjnej i punktów kontrolnych
Atlas interaktywny – Obiekty inżynierskieAtlas interaktywny – Obiekty inżynierskie
-Powrót do spisu treściPowrót do spisu treści