E‑book - Metody i technologie wykorzystywane w pomiarach sytuacyjnych i wysokościowych

Spis treści:
I. Pomiary sytuacyjne
1. Trzy grupy szczegółów terenowych1. Trzy grupy szczegółów terenowych
2. Dokładności pomiaru sytuacyjnego2. Dokładności pomiaru sytuacyjnego
3. Osnowa geodezyjna3. Osnowa geodezyjna
4. Bezpośrednie i pośrednie pomiary długości4. Bezpośrednie i pośrednie pomiary długości
4.1. Pomiary bezpośrednie4.1. Pomiary bezpośrednie
4.2. Pomiary pośrednie4.2. Pomiary pośrednie
5. Pomiar szczegółów sytuacyjnych5. Pomiar szczegółów sytuacyjnych
6. Instrumenty pomiarowe6. Instrumenty pomiarowe
7. Pomiar kątów poziomych7. Pomiar kątów poziomych
8. Tyczenie kątów prostych8. Tyczenie kątów prostych
9. Wyznaczanie azymutów i południków9. Wyznaczanie azymutów i południków
10. Pomiary satelitarne10. Pomiary satelitarne
II. Pomiar wysokościowy i sytuacyjno‑wysokościowy
1. Metody pomiarów wysokościowych1. Metody pomiarów wysokościowych
2. Podział niwelacji geometrycznej ze względu na dokładność2. Podział niwelacji geometrycznej ze względu na dokładność
3. Niwelatory3. Niwelatory
4. Tachimetria4. Tachimetria
5. Fotogrametria cyfrowa5. Fotogrametria cyfrowa
6. Skanowanie powierzchni6. Skanowanie powierzchni
7. Pomiary satelitarne7. Pomiary satelitarne
III. Błędy pomiarówIII. Błędy pomiarów
Podstawa prawnaPodstawa prawna
BibliografiaBibliografia
Metody i technologie wykorzystywane w pomiarach sytuacyjnych i wysokościowych
I. Pomiary sytuacyjne
„Geodezyjny pomiar sytuacyjny - zespół czynności technicznych polegających w szczególności na określeniu położenia szczegółów terenowych w państwowym układzie współrzędnych prostokątnych płaskich oraz pozyskaniu ich podstawowych atrybutów” (Rozporządzenie Ministra Rozwoju z dnia 18 sierpnia 2020 r. w sprawie standardów technicznych wykonywania geodezyjnych pomiarów sytuacyjnych i wysokościowych oraz opracowywania i przekazywania wyników tych pomiarów do państwowego zasobu geodezyjnego i kartograficznego, Dz. U. 2022, poz. 1670).
Pomiary sytuacyjne pozwalają na uzyskanie danych o położeniu punktów wyznaczających szczegóły topograficzne i inne elementy terenu na płaszczyźnie odniesienia w przyjętym układzie współrzędnych. Pomiar szczegółów terenowych, których ze względu na zbyt małe wymiary rzutu konturu nie można przedstawić z dostateczną wyrazistością w skali mapy, należy wykonywać w sposób uproszczony, mierząc środek danego szczegółu. Dotyczy to szczegółów pokazywanych na mapie symbolami.
Powrót do spisu treściPowrót do spisu treści
1. Trzy grupy szczegółów terenowych
Z uwagi na wymagania dokładnościowe pomiaru wyróżniamy trzy grupy szczegółów terenowych.
Do I grupy zaliczane są utrwalone szczegóły terenowe o wyraźnych, jednoznacznie określonych granicach, konturach i kształtach. Należą do nich:
- znaki graniczne granicy państwa, granic podziału administracyjnego, działek,
- obiekty i urządzenia techniczno‑gospodarcze,
- elementy naziemne uzbrojenia terenu, dostępne do pomiaru bezpośredniego,
- obiekty drogowe i kolejowe: mosty, budynki stacyjne, tory kolejowe i tramwajowe, wiadukty, przejazdy, tunele, estakady itp.,
- elementy uliczne, takie jak: pomniki, krawężniki, figury, latarnie, słupy i trwałe ogrodzenia.
Do II grupy dokładnościowej pomiaru należą szczegóły terenowe, które w terenie nie zachowują długoterminowej niezmienności położenia oraz kształtu. Należą do nich:
- punkty załamań konturów budowli i urządzeń ziemnych: groble, tamy, wały ochronne, kanały, wykopy, rowy, nasypy,
- trawniki, boiska sportowe, parki i zieleńce itp.,
- drzewa, pomniki przyrody,
– elementy podziemne uzbrojenia terenu.
Do III grupy dokładnościowej pomiaru zaliczamy punkty, których identyfikacja w terenie nie jest jednoznaczna. Są to:
- punkty załamań konturów użytków gruntowych i konturów klasyfikacyjnych,
- naturalne linie brzegowe wód płynących i stojących (wody o nieuregulowanej linii brzegowej),
- linie podziałowe na oddziały w lasach państwowych,
- punkty załamań dróg dojazdowych przebiegających wewnątrz terenów stanowiących własność państwową lub dróg dojazdowych prywatnych,
- inne obiekty o niewyraźnych konturach.
Powrót do spisu treściPowrót do spisu treści
2. Dokładności pomiaru sytuacyjnego
Pomiar sytuacyjny powinien być wykonywany w taki sposób, aby zapewnić jak największą dokładność. Dokładności pomiaru sytuacyjnego szczegółów terenowych w odniesieniu do poziomej osnowy geodezyjnej powinny być zgodne z dokładnościami danej grupy szczegółów terenowych. Błąd położenia mierzonych punktów nie powinien przekraczać:
- 0,10 m dla I grupy szczegółów terenowych,
- 0,30 m dla II grupy szczegółów terenowych,
- 0,50 m dla III grupy szczegółów terenowych.
Dokładność pomiaru sytuacyjnego danej grupy pomiarów określa Rozporządzenie Ministra Rozwoju z dnia 18 sierpnia 2020 r. w sprawie standardów technicznych wykonywania geodezyjnych pomiarów sytuacyjnych i wysokościowych oraz opracowywania i przekazywania wyników tych pomiarów do państwowego zasobu geodezyjnego i kartograficznego (Dz. U. 2022, poz. 1670). Dokładność pomiaru kontrolnego, a także zgodność realizacji obiektu z projektem lub porównanie ze stanem wyjściowym ocenia się po analizie obliczonych odchyłek danych geodezyjnych: wymiarów, kształtu, położenia, warunków geometrycznych, a także stanu budowli w danym momencie (przemieszczeń i odkształceń).
Powrót do spisu treściPowrót do spisu treści
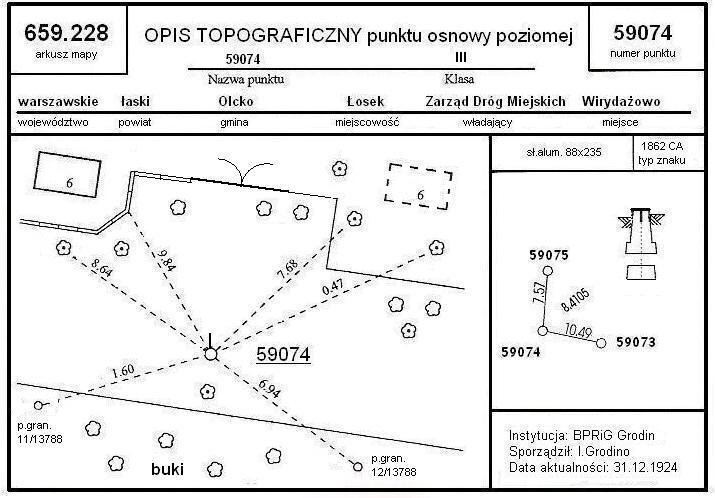
3. Osnowa geodezyjna
Osnowę geodezyjną stanowi usystematyzowany zbiór punktów geodezyjnych, jednoznacznie identyfikowalnych i oznaczonych bądź zastabilizowanych w terenie znakami geodezyjnymi, których położenie wyznaczono w państwowym systemie odniesień przestrzennych w sposób właściwy dla danego rodzaju osnowy z określeniem dokładności tego wyznaczenia. Punkty osnowy geodezyjnej pełnią rolę nawiązania dla wszelkich robót, których wynikiem są współrzędne określone w państwowym systemie odniesień przestrzennych. Ze względu na sposób prezentacji wzajemnego położenia punktów osnowę geodezyjną dzielimy na:
poziomą (precyzującą wzajemne położenie punktów na powierzchni),
wysokościową (określającą wysokości punktów względem powierzchni odniesienia),
dwufunkcyjną, łączącą cechy obu w/w typów osnów.
Zazwyczaj jednak rozmieszczenie punktów osnowy geodezyjnej poziomej i wysokościowej jest niewystarczające, zatem konieczne jest zagęszczenie punktów osnowy geodezyjnej poprzez założenie osnowy pomiarowej.
Podstawowa osnowa pozioma jest jedną z rodzajów osnowy; została wydzielona ze względu na jej funkcjonalność. Z uwagi na dokładność ustalenia położenia lub wielkości fizycznej charakterystycznej dla określonego rodzaju osnów dzieli się ją na klasy: fundamentalną oraz bazową. Klasę fundamentalną podstawowej osnowy geodezyjnej poziomej tworzą punkty włączone do sieci stacji referencyjnych systemu ASG‑EUPOS, których średni błąd położenia poziomego nie przekracza 0,01 m oraz średni błąd wysokości elipsoidalnej nie przekracza 0,02 m. Błąd wysokości normalnej nie powinien przekraczać 0,01 m w nawiązaniu do podstawowej osnowy geodezyjnej wysokościowej. Klasę bazową podstawowej osnowy geodezyjnej poziomej tworzą punkty, których średni błąd położenia poziomego punktu nie przekracza 0,02 m oraz średni błąd wysokości elipsoidalnej tego punktu nie przekracza 0,02 m względem klasy fundamentalnej podstawowej osnowy geodezyjnej poziomej. Błąd wysokości normalnej nie powinien przekraczać 0,05 m w nawiązaniu do geodezyjnej osnowy wysokościowej.
Średni błąd położenia punktów pomiarowej osnowy poziomej nie może być większy niż 0,10 m względem punktów poziomej osnowy geodezyjnej. Średni błąd wysokości punktów pomiarowej osnowy wysokościowej nie może być większy niż 0,05 m względem punktów wysokościowej osnowy geodezyjnej.
Osnowom geodezyjnym przypisane są klasy określające znaczenie osnowy w pracach geodezyjnych i kartograficznych, kolejność włączania punktów osnowy do procesu wyrównania obserwacji, a także dokładność wyznaczania parametrów.
Poziome osnowy geodezyjne podlegają zatem następującemu podziałowi:
- podstawowa osnowa geodezyjna fundamentalna,
- podstawowa osnowa geodezyjna bazowa,
- szczegółowa osnowa geodezyjna,
Analogicznemu podziałowi podlegają osnowy wysokościowe
Sieć geodezyjna to figura geometryczna określająca wzajemne powiązanie punktów osnów geodezyjnych położonych w tym samym układzie odniesienia. Sieć geodezyjna tworzona jest według tej samej technologii pomiarowej i jednolitego modelu matematycznego. Punkty sieci geodezyjnej należą do tej samej klasy dokładnościowej co osnowa geodezyjna.
Dokładność osnów geodezyjnych charakteryzowana jest poprzez:
- średni błąd poziomego położenia punktu,
- średni błąd wysokości punktu,
- średni błąd różnicy wysokości na odcinku 1 km,
- średnie błędy wzajemnego położenia punktów (poziomego lub pionowego),
- średnie błędy wybranych elementów geometrycznych sieci (długość, różnice wysokości, azymut).
Powrót do spisu treściPowrót do spisu treści
4. Bezpośrednie i pośrednie pomiary długości
Geodezyjne pomiary (liniowe) to metody pomiaru odległości między punktami w terenie. Można je podzielić na pomiary bezpośrednie oraz pośrednie.
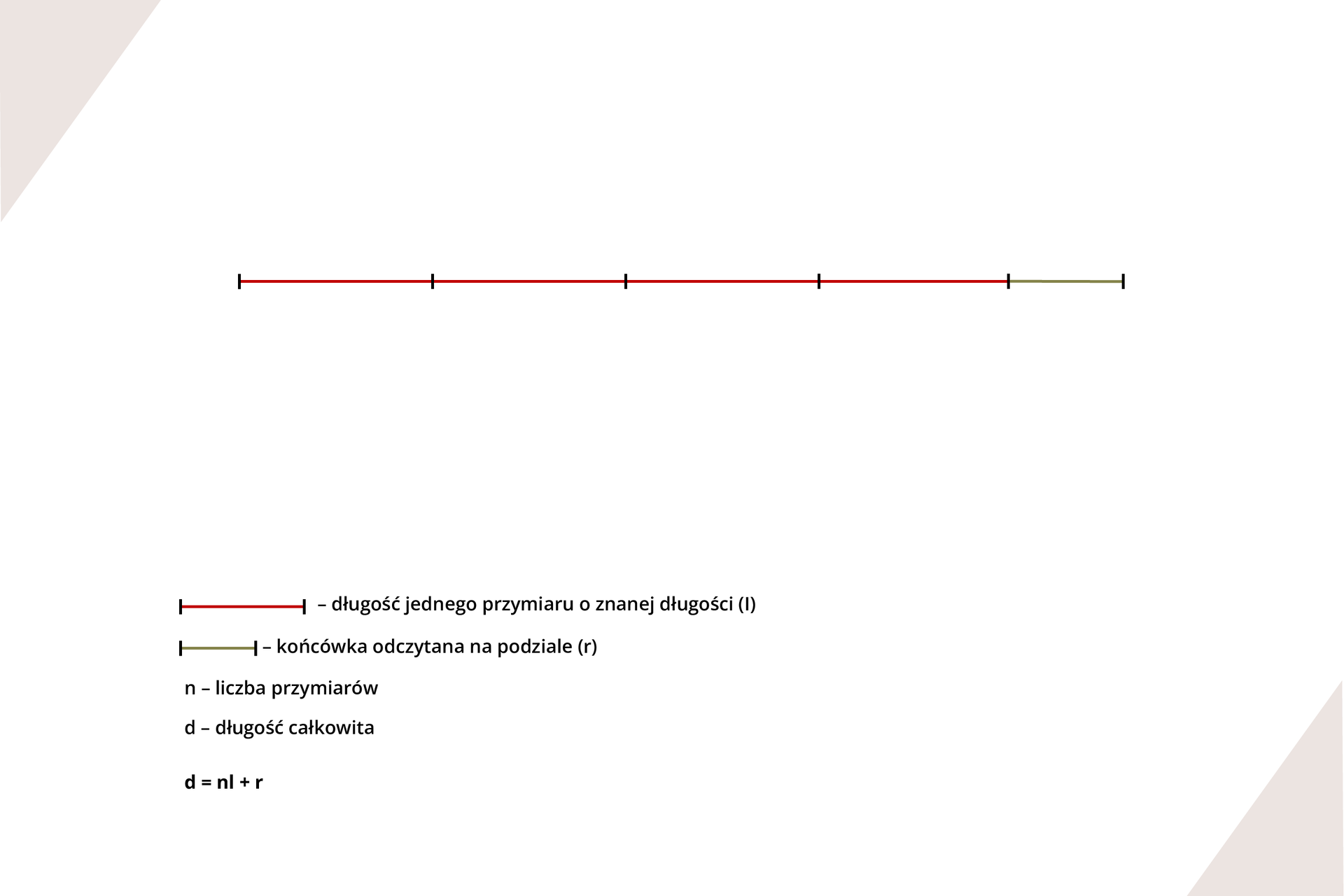
Pomiar bezpośredni polega na zastosowaniu dalmierzy lub wielokrotnym odkładaniu przymiaru wzdłuż mierzonego odcinka.
Pomiary pośrednie polegają na mierzeniu niektórych wielkości, np. odpowiednich kątów, długości odcinków, i na tej podstawie wyznaczaniu szukanej długości odcinka. Podczas pośredniego wyznaczania długości dostępność wyznaczonego odcinka na całej jego długości nie jest konieczna; wystarczy dostępność punktów końcowych.
Powrót do spisu treściPowrót do spisu treści
4.1. Pomiary bezpośrednie
Pomiary bezpośrednie wykorzystują różne narzędzia do pomiaru odległości i kątów. W przeszłości, popularnymi narzędziami były dalmierze optyczne, (np.: lunety teodolitów i niwelatorów), które jednak należały do pomiarów pośrednich, natomiast współcześnie wykorzystuje się dalmierze elektroniczne, które pozwalają na jeszcze większą precyzję i automatyczną redukcję nachylonych odległości do poziomu. Wykorzystywanie dalmierzy elektronicznych znacznie usprawnia proces pomiarów bezpośrednich.
Innym narzędziem wykorzystywanym w pomiarach bezpośrednich jest taśma stalowa. Taśmy mają długość 20 metrów i są podzielone na decymetry. Pomiar odległości odbywa się poprzez wielokrotne odkładanie przymiaru wzdłuż mierzonego odcinka. Współcześnie taśma stalowa jest rzadziej stosowana ze względu na ograniczenia związane z precyzją i wygodą pomiaru.
W przypadku pomiarów o bardzo dużej dokładności stosuje się druty inwarowe wykonane ze stopu żelaza i niklu. Druty te mają długość 8 lub 24 metrów i są zakończone podziałkami z kółkami, do których zaczepia się obciążony ciężarkiem naciągającym drut.
Kolejnym tradycyjnym narzędziem pomiarowym jest ruletka geodezyjna o długości 30, 50 lub 100 metrów z podziałem centymetrowym. Ruletki geodezyjne pozwalają na pomiar odległości w terenie, jednak ich zastosowanie również zostało ograniczone w obliczu bardziej precyzyjnych i efektywnych metod pomiarowych.
Wraz z rozwojem technologii geodezyjnych tradycyjne metody pomiarów bezpośrednich przy zastosowaniu przyrządów mierniczych, takich jak taśmy stalowe, ruletki geodezyjne i dalmierze optyczne, zostały zastąpione bardziej nowoczesnymi i dokładnymi technologiami, mimo, że polegają one na pośrednim wyznaczeniu odległości. Obecnie głównymi metodami pomiarów są pomiary satelitarne (GNSS) oraz skanowanie laserowe (LiDAR). Pomiar satelitarny zapewnia wysoką precyzję pozycjonowania, podczas gdy skanowanie laserowe umożliwia tworzenie dokładnych chmur punktów w trójwymiarze. Te nowoczesne metody pomiarowe są szeroko stosowane w geodezji i inżynierii, ze względu na ich wysoką dokładność, efektywność i możliwość pracy na dużych obszarach.
Powrót do spisu treściPowrót do spisu treści
4.2. Pomiary pośrednie
Metody geometryczne polegają na bezpośrednim pomiarze linii pomocniczych; do wytyczania kątów prostych wykorzystuje się węgielnicę, zaś do obliczania poszukiwanej długości stosuje się wzory znane z geometrii.
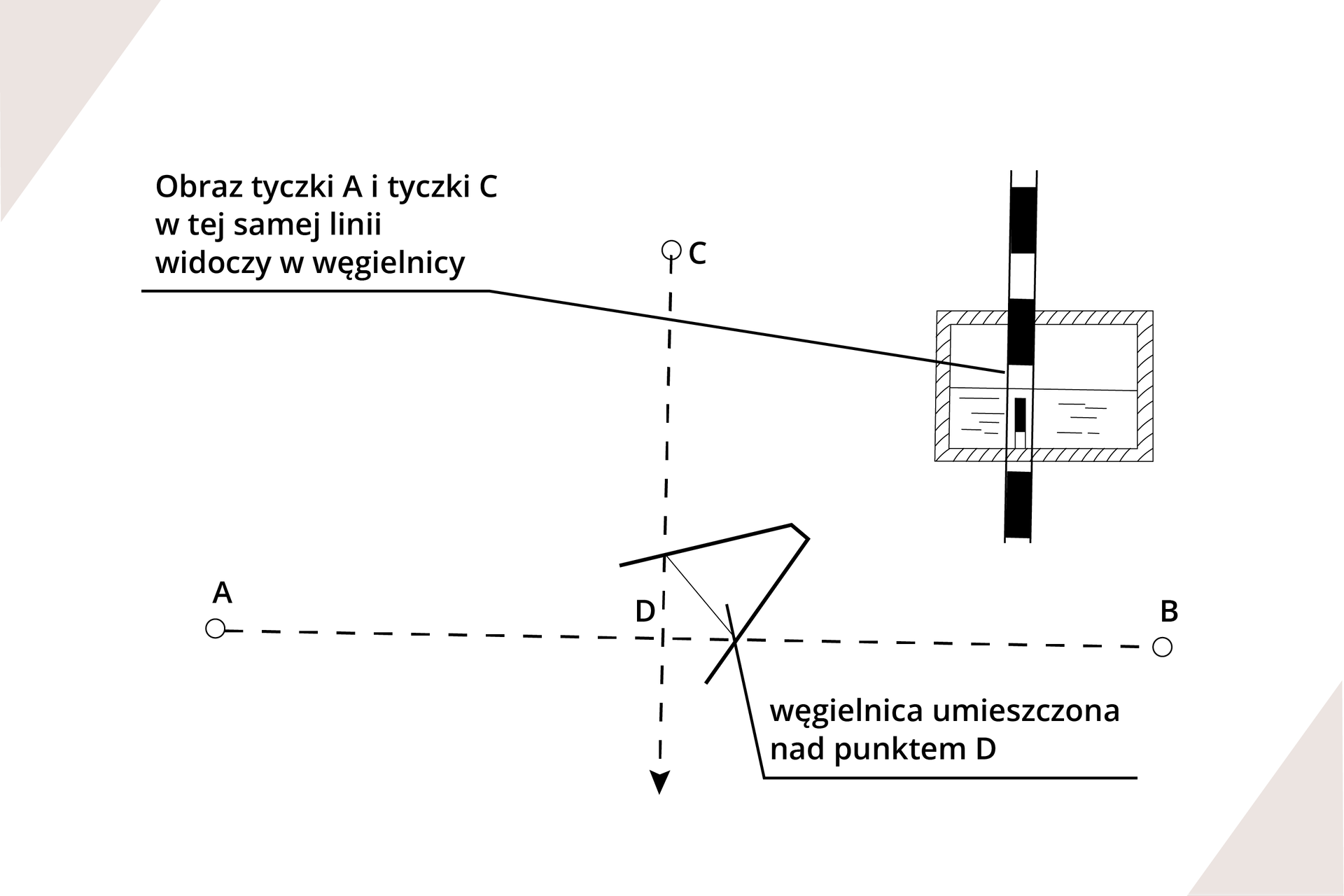
Mierząc odległości AD i DC, na podstawie twierdzenia Pitagorasa można obliczyć odległość AC.
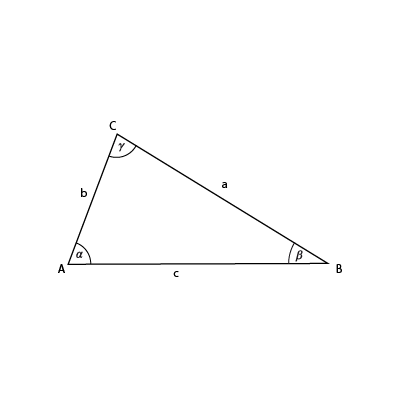
Metody trygonometryczne wykorzystują zależności trygonometryczne występujące w dowolnym trójkącie. Mierzony jest jeden bok i dwa albo trzy kąty bądź dwa boki i kąt między nimi. W pierwszym przypadku stosuje się twierdzenie sinusów, w drugim - cosinusów.
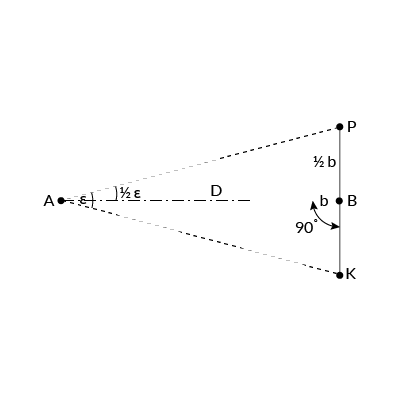
Metoda oparta na rozwiązaniu trójkąta równoramiennego APK. W przypadku znajomości kąta paralaktycznego (określonego dla danego instrumentu) pomiarowi podlega odczyty z łaty znajdującej się na mierzonym punkcie. Odległość do punktu określana jest poniższym wzorem.
Powrót do spisu treściPowrót do spisu treści
5. Pomiar szczegółów sytuacyjnych
Po założeniu osnowy pomiarowej, jej zagęszczeniu oraz wykonaniu prac pomiarowych i obliczeniowych można przystąpić do pomiarów szczegółów terenowych, czyli domierzeniu do osnowy punktów szczegółów terenowych i ustaleniu ich położenia względem punktów osnowy.
Najpopularniejszą metodą wykonywania pomiarów szczegółów terenowych jest metoda precyzyjnego pozycjonowania z zastosowaniem GNSS; inne metody to: metoda domiarów prostokątnych (ortogonalna/rzędnych i odciętych) i biegunowa.
W trakcie pomiaru w terenie konieczne są pewne uproszczenia (generalizacja), czyli:
- pominięcie istnienia odchyleń od prostej (przyjęcie za prostą łamanej),
- pominięcie istnienia wymiaru poprzecznego obiektów wydłużonych,
- pominięcie istnienia obiektów nienależących do zbioru obiektów systemu informacji o terenie (SIT), które nie zostały przez zamawiającego pomiar wskazane jako obiekty pomiarowe lub – ze względu na stan bądź okoliczności terenowe – mają ograniczoną trwałość.
Przy pomiarze sytuacyjnym pomija się:
- istniejące odchylenia kształtu od prostej, gdy są nie większe od błędów położenia punktu obiektu grupy dokładności, do której należy mierzony obiekt,
- wymiar poprzeczny – mierzy się przebieg osi, gdy obiekt jest definiowany jako liniowy, czyli jego wymiar szerokości jest nieistotny.
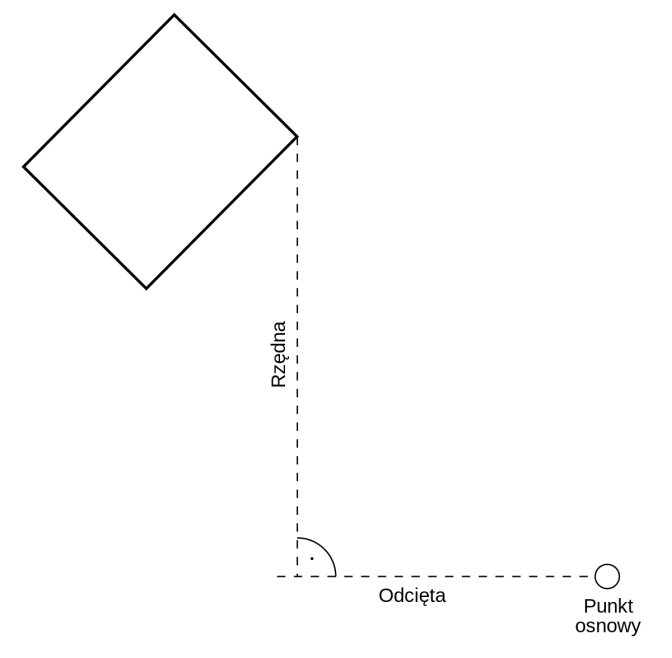
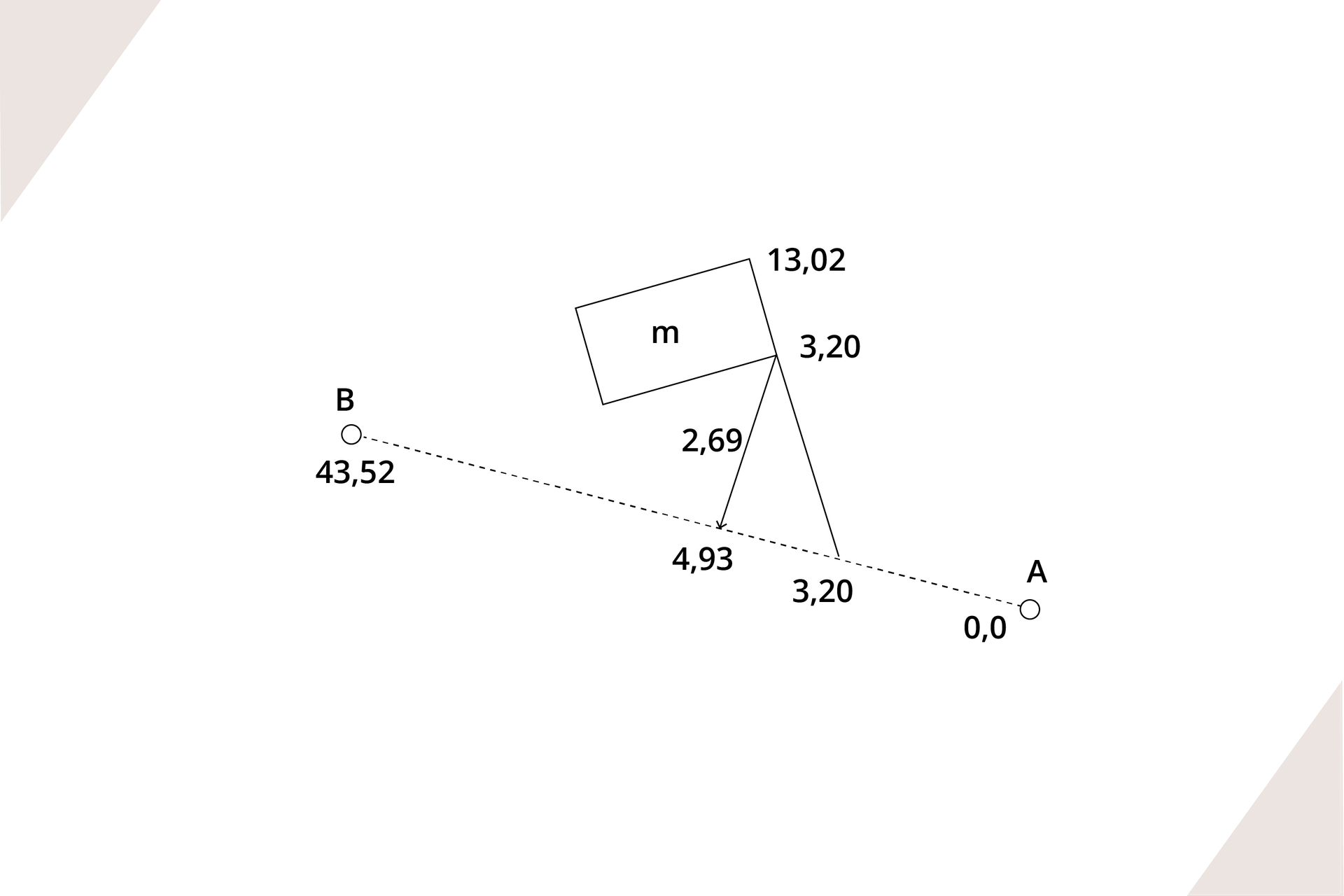
Metoda domiarów prostokątnych polega na rzutowaniu punktów wyznaczających szczegóły sytuacyjne na bok osnowy pomiarowej. Linie służące do rzutowania na nie punktów sytuacyjnych to linie pomiarowe, powstające z połączenia istniejących punktów osnowy pomiarowej.
Metoda ta pozwala na określenie położenia punktu względem boku osnowy pomiarowej na podstawie dwóch miar: odciętej i rzędnej. Miara bieżąca (odcięta) to odległość rzutu prostokątnego punktu sytuacyjnego na linię pomiarową od punktu początkowego linii pomiarowej. Domiar (rzędna) jest odległością punktu sytuacyjnego od linii pomiarowej.
Zdejmowany punkt sytuacyjny C sygnalizuje się tyczką, następnie za pomocą węgielnicy określa i oznacza położenie rzutu prostokątnego C’ tego punktu na linię pomiarową AB, po czym odczytuje na rozciągniętej wzdłuż niej taśmie wartość odciętej l = AC’. Odcinek rzędnej h = CC’ domierza się ruletką. Odcięta i rzędna to współrzędne prostokątne w układzie linii pomiarowej.
Po zdjęciu wszystkich punktów sytuacyjnych przypadających na aktualne odłożenie taśmy przesuwa się ją do następnego przyłożenia i kontynuuje rzutowanie.
Miary bieżące (odcięte) liczone są zawsze od początku linii pomiarowej, a zatem do aktualnego odczytu widocznego na wstędze taśmy należy dodawać odległość wynikającą z liczby wykonywanych wcześniej pełnych odłożeń przymiaru. Dla uzyskania dobrej widoczności obrazów tyczek bocznych w węgielnicy dwupryzmatycznej (urządzenie zbudowane z dwóch umieszczonych jeden nad drugim pryzmatów oraz okienka pomiędzy nimi; pryzmaty umożliwiają patrzenie pod kątem prostym na prawo i lewo) należy przetyczyć linię pomiarową, wprowadzając na nią tyczki pośrednie. Podczas zdjęcia szczegółów metodą domiarów prostokątnych punkty pośrednie na linii pomiarowej powinny znajdować się od siebie w odległości nie większej niż 100 m i być wcześniej wytyczone instrumentem kątomierczym przynajmniej o 16‑krotnym powiększeniu lunety.
Metoda biegunowa polega na wyznaczaniu długości d osi celowej (odległości) od znanego punktu osnowy do punktu zdejmowanego oraz kąta alfa pomiędzy bokiem osnowy a osią celową.
Do wykonania pomiaru metodą biegunową używa się:
do pomiaru kątów – teodolitu,
do pomiaru długości – ruletki, dalmierza optycznego lub elektronicznego,
tachimetru, który jednocześnie mierzy kąty i odległości.
Przy geodezyjnym pomiarze stanowiskami instrumentu oraz punktami nawiązania mogą być:
punkty pomiarowej osnowy poziomej,
punkty poziomej osnowy geodezyjnej.
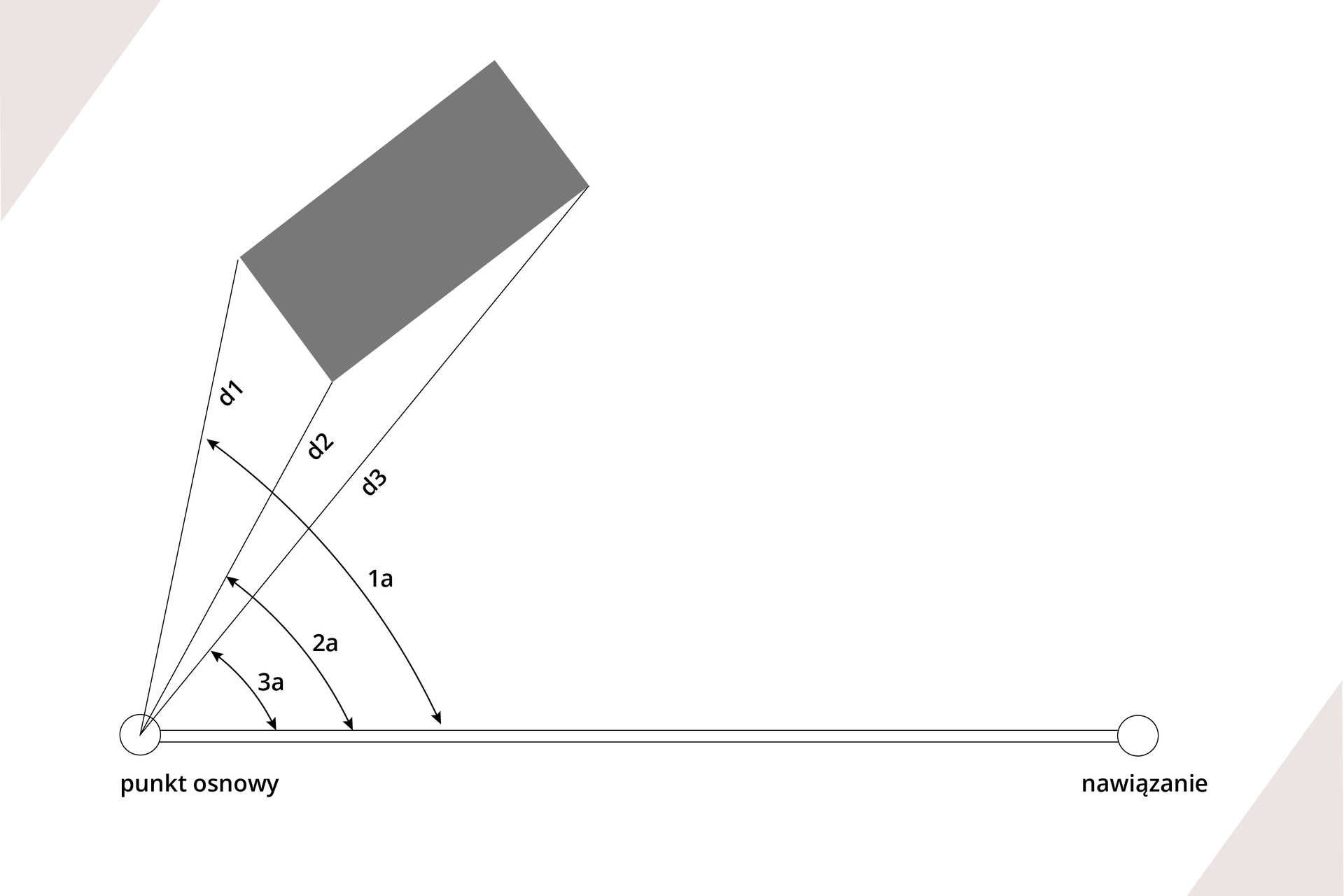
d - oś celowa (odległość) od znanego punktu osnowy do punktu zdejmowanego
alfa - kąt pomiędzy bokiem osnowy a osią celową
Mimo, że kąty zazwyczaj mierzy się zgodnie z ruchem zegara, to w obecnych instrumentach istnieje możliwość pomiaru kątów w lewo i w prawo.
Przy pomiarze szczegółów terenowych II oraz III grupy dokładnościowej stanowiskami i nawiązaniami mogą być szczegóły terenowe I grupy.
Długość nawiązania nie może być mniejsza niż 40 metrów. Minimalna liczba nawiązań: 2. Wyjątkiem jest pomiar wykonywany z ostatniego punktu ciągu wiszącego, gdy dopuszcza się jeden kierunek nawiązania, wówczas jednak należy wykonać pomiar kontrolny na co najmniej jeden szczegół terenowy I grupy o znanych współrzędnych.
Metoda przedłużeń konturów sytuacyjnych np. ściany budynku polega na przedłużeniu odcinka zdejmowanego do przecięcia z linią osnowy pomiarowej.
Metoda wcięć liniowych polega na pomiarze odległości od punktu zdejmowanego do dwóch punktów leżących na liniach osnowy pomiarowej.
W zależności od wykonywanych pomiarów wcięcia dzielimy na:
- kątowe
- liniowe
- kątowo‑liniowe (kombinowane)
W zależności od ustawienia instrumentu dzielimy na:
- w przód (instrument stoi na punktach o znanych współrzędnych)
- wstecz (instrument na punkcie wcinanym).
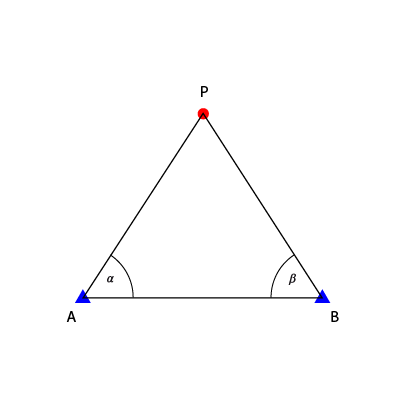
Kolorem niebieskim zaznaczone stanowiska teodolitu A i B, na punktach o znanych współrzędnych i mierzone kąty alfa i beta. Kolorem czerwonym punkt, którego współrzędne chcemy wyznaczyć, zwany punktem wcinanym.
Metoda wcięć kątowo‑liniowych wykorzystuje pomiar kątów i odległości. Można stwierdzić, że łączy ona metodę wcięcia kątowego z wcięciem liniowym, dlatego wcięcie kątowo‑liniowe nazywane jest wcięciem kombinowanym.
Powrót do spisu treściPowrót do spisu treści
6. Instrumenty pomiarowe
Przyjrzyjmy się bliżej instrumentom pomiarowym. Do pomiaru odległości wykorzystuje się zazwyczaj fale elektromagnetyczne. Pomiar opiera się na właściwości prostoliniowego rozchodzenia się fal elektromagnetycznych ze stałą prędkością. Jeśli znana jest szybkość rozchodzenia się fali w powietrzu i czas jej przebiegu, można ustalić odległość między punktami. W zależności od długości fal stosowanych w dalmierzu wyróżniamy: dalmierze radarowe, radiowe i świetlne.
Pomiar odległości dalmierzem elektronicznym pomiędzy punktami A i B polega na wysyłaniu przez dalmierz fali elektromagnetycznej z punktu A, odbiciu jej od lustra w punkcie B i odbiorze jej przez dalmierz określający czas przebiegu fali na drodze A‑B-A. Wartość odległości jest widoczna na wyświetlaczu.
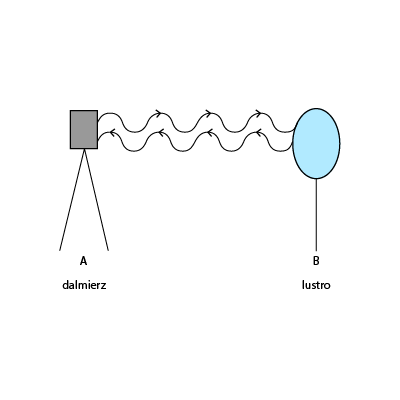
Do pomiaru odległości można też wykorzystać instrumenty bezlustrowe – wówczas, gdy mierzymy odległość na płaskiej, jasnej przestrzeni.
Do fazowego pomiaru odległości wykorzystuje się dalmierze fazowe; pomiar odbywa się w sposób pośredni, poprzez określenie różnicy faz fali pomiarowej wychodzącej z dalmierza i powracającej do niego. Własności fal (stabilna częstotliwość, zwarta wiązka) uzyskuje się przez modulację (nakładanie się na siebie dwóch fal).
6.1 Instrumenty do pomiaru odległości
Dalmierz impulsowy mierzy czas poprzez rejestrację wyjścia i powrotu impulsu świetlnego. Pomiar czasu i obliczanie odległości są zautomatyzowane; wynik pomiaru długości jest wyświetlany w oknie odczytowym.
Geodezyjne dalmierze świetlne są umieszczane w lunetach tachimetrów elektronicznych bądź występują jako nasadki dedykowane do zainstalowania na lunecie tradycyjnego teodolitu. Niekiedy mają formę małych ręcznych dalmierzy do pomiaru niewielkich odległości (do 100 m).
6.2 Instrumenty do pomiaru kątów
Teodolit – instrument do pomiaru kątów poziomych i pionowych, składa się ze: spodarki (metalowa płyta wyposażona w trzy poziomujące śruby), limbusa (szklany bądź metalowy krążek) i alidady (ruchoma część teodolitu składająca się z wielu mechanicznych i optycznych podzespołów). W ramach tych zespołów wyróżnia się: lunetę, limbus pionowy (metalowe bądź szklane koło pionowe lub wierzchołkowe), urządzenia odczytowe, libellę (szklana rurka mająca w przekroju podłużnym kształt koła), śruby poziomujące, zaciskowe, ruchu powolnego, rektyfikacyjne. Teodolit może być także wzbogacony w mikroskop odczytowy i układy optyczne, pion optyczny, śrubę rejteracyjną lub zacisk repetycyjny. Integralną częścią teodolitu jest też statyw i wyposażenie dodatkowe.
6.3 Instrumenty do pomiaru odległości i kątów
Współczesny tachimetr elektroniczny jest połączeniem teodolitu elektronicznego z elektronicznymi systemami odczytowymi kierunków poziomych i pionowych oraz umieszczonego w lunecie dalmierza elektronicznego. Instrument składa się z kilku podstawowych elementów: mikroprocesora, klawiatury numerycznej lub alfanumerycznej, wyświetlacza ciekłokrystalicznego, monitora, rejestratora, gniazda oraz baterii. Do wyposażenia tachimetru należy także statyw i pryzmat — zwierciadło zwrotne umieszczone na tyczce.
Powrót do spisu treściPowrót do spisu treści
7. Pomiar kątów poziomych
Pomiary kątowe i odległościowe wykonuje się, ustawiając instrument i sygnał (tarczę celowniczą) centrycznie nad punktami geodezyjnymi. Instrument powinien zostać dokładnie spoziomowany i scentrowany. Na początku wykonuje się zgrubne centrowanie, czyli ustawienie instrumentu na głowicy statywu w taki sposób, aby pion znalazł się nad punktem.
Pomiaru kąta dokonujemy celując na dwa kierunki wyznaczające ramienia kąta, kierunek lewy (KL) i kierunek prawy (KP). Wartość kąta otrzymujemy z odjęcia tych dwóch odczytów na podstawie wzoru:
Wartość kąta = KP - KL
Można ułatwić sposób pomiaru dokonując tzw. wyzerowania kierunku lewego. Wtedy jego wartość wynosi 0Indeks górny gg, czyli wartość kąta otrzymamy od razu z pomiaru kierunku prawego.
Kąty poziome możemy mierzyć kilkoma sposobami:
- metoda pojedynczego kąta
- metoda kierunkowa
- metoda wypełniania horyzontu
- metoda sektorowa
- metoda Schreibera
Pomiar wykonany przy dwóch położeniach koła to seria. Między pierwszym a drugim położeniem lunety alidada obracana jest o 200Indeks górny gg.
Aby móc skierować lunetę na sąsiednie punkty tworzące kąt, należy je zasygnalizować, np. poprzez umieszczenie na nich tyczek geodezyjnych.
Podczas celowania należy posługiwać się śrubami zaciskowymi oraz leniwkami alidady i lunety. Po zwolnieniu śrub naprowadza się lunetę na punkt celowany, aby znalazł się on w jej polu widzenia, następnie przykręca śruby zaciskowe i leniwkami naprowadza lunetę na cel.
Powrót do spisu treściPowrót do spisu treści
8. Tyczenie kątów prostych
Podczas wykonywania pomiarów szczegółowych zachodzi niekiedy potrzeba tyczenia kątów prostych przy użyciu węgielnicy, czyli szklanego pryzmatu w kształcie graniastosłupa o podstawie trójkąta prostokątnego równobocznego. W dwóch okienkach węgielnicy widzimy tyczki znajdujące się po lewej i prawej stronie obserwatora a w trzecim tyczkę znajdującą się naprzeciwko.
Kiedy wszystkie trzy obrazy pokryją się znajdujemy się w punkcie w którym wyznaczony jest kąt prosty.
Wyznaczanie kąta prostego za pomocą teodolitu: do wyznaczenia kątów wymagane są dwie osoby oraz teodolit i tyczka. Po odpowiednim ustawieniu przyrządu należy na wyznaczonej osi ustawić tyczkę i odczytać wartość kątową (kierunek lewy‑KL) w miejscu jej ustawienia. Oś - linia łącząca tyczkę z punktem, nad którym jest ustawione urządzenie kątowe – stanowi jedno ramię kąta. Przesuwając lunetę w żądanym kierunku, odmierzamy kąt (kierunek prawy – KP) o wartości wyliczonej z poniższego wzoru
KP = KL + 100Indeks górny gg
Patrząc w lunetę i kierując ruchami osoby trzymającej tyczkę, ustawiamy ją w miejscu pokrywającym się z dokonanym odczytem. W ten sposób zostaje wyznaczony przebieg drugiego ramienia kąta, czyli linia łącząca wyznaczony punkt z wierzchołkiem kąta, nad którym ustawiony jest teodolit.
Powrót do spisu treściPowrót do spisu treści
9. Wyznaczanie azymutów i południków
Azymut kierunku to kąt poziomy, liczony od kierunku północy w prawo, zawarty między północą a danym kierunkiem. Azymut mierzymy w punkcie obserwacji, zgodnie z ruchem wskazówek zegara, od południka do kierunku odcinka. Azymut danej linii nie jest wielkością stałą na całej jej długości, gdyż kierunki południków nie są do siebie równoległe, stanowiąc układ linii zbieżnych w biegunie.
Kierunek południka geograficznego można wyznaczyć metodami astronomii geodezyjnej na podstawie obserwacji gwiazd lub Słońca bądź za pomocą żyroskopu.
Południk magnetyczny wyznacza się, wykorzystując zawieszoną swobodnie igłę magnetyczną, którą ustawia się zawsze w stałym określonym kierunku w płaszczyźnie południka magnetycznego. Bieguny magnetyczny i geograficzny nie pokrywają się ze sobą, dlatego płaszczyzny południków magnetycznych i geograficznych są od siebie oddalone o kąt, który nosi nazwę deklinacji magnetycznej (zmiennej w czasie i przestrzeni).
Południk kartograficzny to oś x układu współrzędnych prostokątnych danej mapy. Kąt utworzony między kierunkiem równoległym do południka osiowego obszaru odwzorowywanego i danym kierunkiem nazywa się azymutem kartograficznym.
W jaki sposób można wyznaczyć południk geograficzny?
Metody astronomiczne polegają na pomiarze odległości zenitalnej obranego ciała niebieskiego wraz z czasem owego pomiaru. Na podstawie tych danych oraz znajomości współrzędnych obserwowanego ciała niebieskiego (uzyskanych z tablic astronomicznych) można obliczyć azymut ciała niebieskiego w momencie obserwacji i na tej podstawie wyznaczyć kierunek południka geograficznego. Do dokładnego wyznaczenia kierunku południka geograficznego na półkuli północnej wykorzystuje się Gwiazdę Polarną.
Metody żyroskopowe pozwalają wyznaczyć kierunek południka geograficznego na podstawie ruchu osi obrotu szybko obracającego się krążka żyroskopu (bryły wirującej dookoła swej osi symetrii).
Powrót do spisu treściPowrót do spisu treści
10. Pomiary satelitarne
Pomiary satelitarne polegają na wyznaczeniu pozycji na podstawie znajomości współrzędnych satelitów w momencie wysyłania sygnału i pomiarze pseudoodległości od satelity do odbiornika.
GNSS to Globalny System Nawigacji Satelitarnej (Global Navigation Satellite System), który służy do wyznaczania pozycji użytkownika. Obecnie do GNSS zaliczamy: GPS, GLONASS, BeiDou, Galileo, QZSS. Do wyznaczania pozycji potrzebna jest nam znajomość współrzędnych minimum czterech satelitów w momencie wysyłania sygnału.
W systemie tym otrzymuje się współrzędne punktów w jednolitym, globalnym, trójwymiarowym układzie współrzędnych WGS’84; jego początek znajduje się w centrum masy Ziemi. Podstawowe części systemów to segmenty: kosmiczny, stacji kontrolnych, użytkowników posługujących się odbiornikami satelitarnymi.
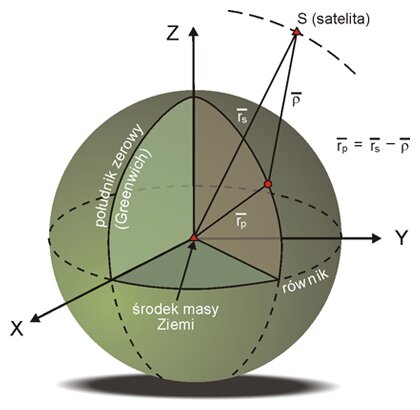
– wektor punktu określanego,
– wektor określający w momencie pomiaru pozycję satelity,
– wektor mierzony
Pomiary satelitarne mają wiele zalet w porównaniu do tradycyjnych metod pomiarowych. Jedną z nich jest wysoka precyzja pozycjonowania, która może sięgać kilku centymetrów lub nawet mniej w przypadku zaawansowanych odbiorników. Ponadto są szybkie i skuteczne, pozwalając na wykonywanie pomiarów na dużych obszarach w krótkim czasie.
W praktyce geodeci wykorzystują pomiary satelitarne do różnych celów. Jednym z najważniejszych zastosowań jest aktualizacja baz danych, które są niezbędne do tworzenia np. map sytuacyjnych, ewidencyjnych, map do celów projektowych. Itp. które są niezbędne przy projektowaniu infrastruktury, takiej jak drogi, mosty, budynki czy sieci komunikacyjne. Pomiary satelitarne umożliwiają dokładne określenie współrzędnych geograficznych punktów, ich wysokości nad poziomem morza oraz nachylenia terenu. Pomiary satelitarne mają również zastosowanie w monitorowaniu deformacji terenu. Dzięki regularnym pomiarom satelitarnym można kontrolować przemieszczenia, osiadania czy deformacje obiektów geotechnicznych, takich jak budowle, zapory czy osuwiska. To pozwala na wczesne wykrywanie problemów i podejmowanie odpowiednich działań naprawczych. Jednak pomiarom satelitarnym towarzyszą pewne wyzwania. Czynniki atmosferyczne, takie jak pogoda, mogą wpływać na jakość odbieranych sygnałów i dokładność pomiarów. Dodatkowo, teren o dużej koncentracji wysokich budynków lub wąskie doliny mogą powodować tzw. efekt cienia, czyli ograniczenie widoczności niektórych satelitów.
Technologia satelitarna w geodezji jest niezwykle cenna i stale się rozwija. Dzięki niej geodeci i inżynierowie mają dostęp do precyzyjnych danych pomiarowych, które są niezbędne do planowania, projektowania i monitorowania infrastruktury. Pomiarom satelitarnym można zaufać, ponieważ są one oparte na sprawdzonych naukowo metodach, a ich dokładność jest stale doskonalona i weryfikowana.
II. Pomiar wysokościowy i sytuacyjno‑wysokościowy
„Geodezyjny pomiar wysokościowy – zespół czynności technicznych polegających na określeniu wysokości charakterystycznych punktów szczegółów terenowych w państwowym układzie wysokościowym” (Rozporządzenie Ministra Rozwoju z dnia 18 sierpnia 2020 r. w sprawie standardów technicznych wykonywania geodezyjnych pomiarów sytuacyjnych i wysokościowych oraz opracowywania i przekazywania wyników tych pomiarów do państwowego zasobu geodezyjnego i kartograficznego, Dz. U. 2022, poz. 1670).
Do pomiarów wysokościowych należą czynności związane z ustalaniem wysokości albo różnic wysokości punktów znajdujących się na powierzchni Ziemi. Pomiary te opierają się na sieci znaków wysokościowych zwanych reperami.
Do pomiarów sytuacyjno‑wysokościowych zalicza się takie, które umożliwiają jednoczesne wyznaczenie położenia i wysokości punktów terenowych.
Powyższa tabela zwiera dane z pomiaru niwelacji geometrycznej ze środka.
Wykorzystując pomierzone wartości należy obliczyć współrzędne narożników mierzonego budynku. Dodatkowo wykonać kontrolę współrzędnych obliczonych z obu stanowisk dla punktu nr 2, czy mieszczą się w dopuszczalnej odchyłce dla szczegółów I grupy dokładnościowej (0.10 m).
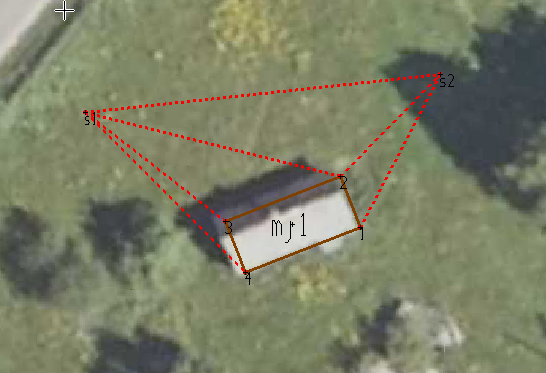
Stanowisko nr 1 – s1
współrzędne x=5820523.94 y=8458485.07
Nawiązanie – s2 – 0.0000 g, odległość = 29.80 m
Stanowisko nr 2 – s2
współrzędne x=5820527.16 y=8458514.69
Nawiązanie – s1 – 0.0000 g, odległość = 29.80 m
Powrót do spisu treściPowrót do spisu treści
1. Metody pomiarów wysokościowych
Wysokości punktów określa się poprzez pomiar różnic wysokości, czyli niwelację.
Rodzaje niwelacji:
niwelacja barometryczna,
niwelacja trygonometryczna,
niwelacja hydrostatyczna,
bezpośredni pomiar różnic wysokości za pomocą przymiarów zwisających,
niwelacja fotogrametryczna,
niwelacja satelitarna (GNSS),
niwelacja geometryczna.
Niwelacja barometryczna to określanie różnic wysokości pomiędzy punktami na podstawie pomiaru ciśnienia atmosferycznego w tych punktach. Dokładność tej niwelacji wynosi 2‑3 m.
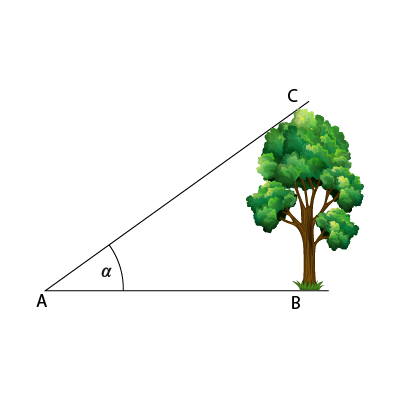
Niwelacja trygonometryczna polega na określeniu różnicy wysokości jako przyprostokątnej trójkąta prostego, w którym zmierzono kąt ostry naprzeciwko tej przyprostokątnej oraz jeden z boków przyległych do kąta – przeciwprostokątną lub przyprostokątną. Obliczenie różnicy wysokości opiera się na zależnościach trygonometrycznych zachodzących w trójkącie prostokątnym.
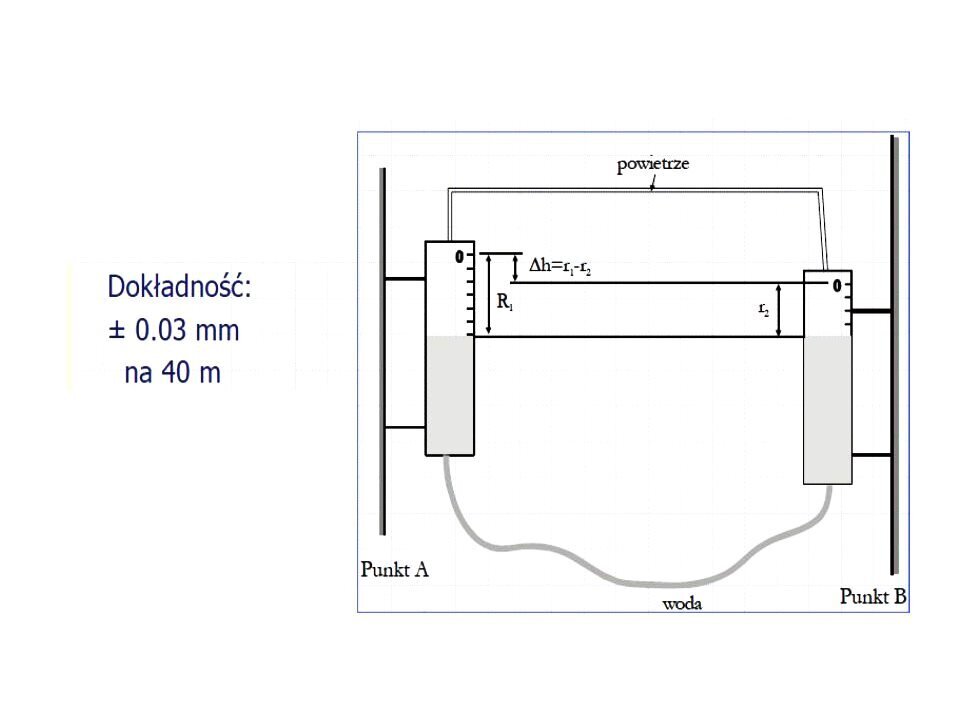
Niwelacja hydrostatyczna polega na wyznaczaniu różnic wysokości w oparciu o pomiar poziomu cieczy w naczyniach połączonych. Dzięki niej można prowadzić okresowe obserwacje osnowy wysokościowej.
Bezpośredni pomiar różnic wysokości za pomocą przymiarów zwisających – metoda ta pozwala obliczyć wysokości za pomocą wstęgowych lub drutowych przymiarów zawieszonych na jednym końcu, a na drugim obciążonych.
Metoda fotogrametryczna opiera się na utworzeniu modelu stereoskopowego, który powstaje dzięki obserwacjom pary zdjęć lotniczych lub naziemnych za pomocą przyrządów fotogrametrycznych (np. stereoskop), obecnie głównie w cyfrowej stacji
fotogrametrycznej.
Niwelacja metodą satelitarną (GNSS) – pomiar różnic wysokości punktów wykonywany metodą precyzyjnego pozycjonowania przy pomocy globalnego systemu nawigacji satelitarnej. Jest to zespół czynności, których rezultatem jest wyznaczenie wysokości ortometrycznych na podstawie wysokości geometrycznych wyznaczanych techniką satelitarną GNSS oraz informacji o ziemskim polu siły ciężkości, które pozwalają wyznaczyć odstęp geoidy od elipsoidy.
Niwelacja geometryczna polega na wyznaczeniu różnicy między dwoma sąsiednimi punktami terenowymi za pomocą celowania wzdłuż poziomej linii do pionowo ustawionych na tych punktach łat niwelacyjnych.

Powrót do spisu treściPowrót do spisu treści
2. Podział niwelacji geometrycznej ze względu na dokładność
Niwelacja w przód – podczas wykonywania niwelacji tym sposobem instrument (niwelator) znajduje się na jednym końcu niwelowanego odcinka, natomiast na drugim końcu stoi łata niwelacyjna, na której wykonujemy pomiar w przód - p. Na stanowisku niwelatora jego wysokość ( i ) mierzymy za pomocą ruletki lub łaty – zastępujemy w ten sposób odczyt wstecz. Różnicę wysokości obliczamy ze wzoru: HAB = i - p. Gdy wysokość stanowiska instrumentu jest znana, wtedy wysokość punktu ustawienia łaty wyraża się wzorem: HB = HA + i - p. Wysokość osi celowej stanowi suma wysokości stanowiska i wysokości instrumentu.
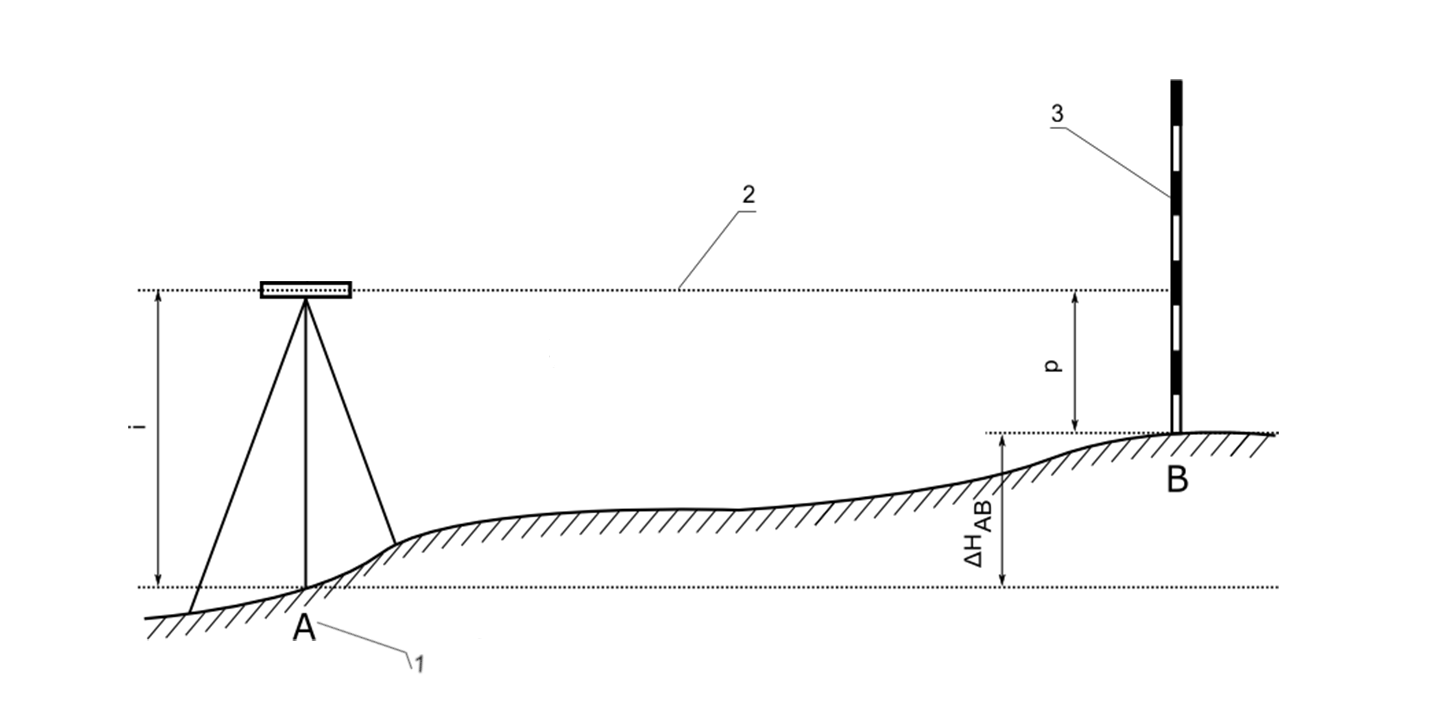
1. stanowisko instrumentu, 2. celowa, 3. łata
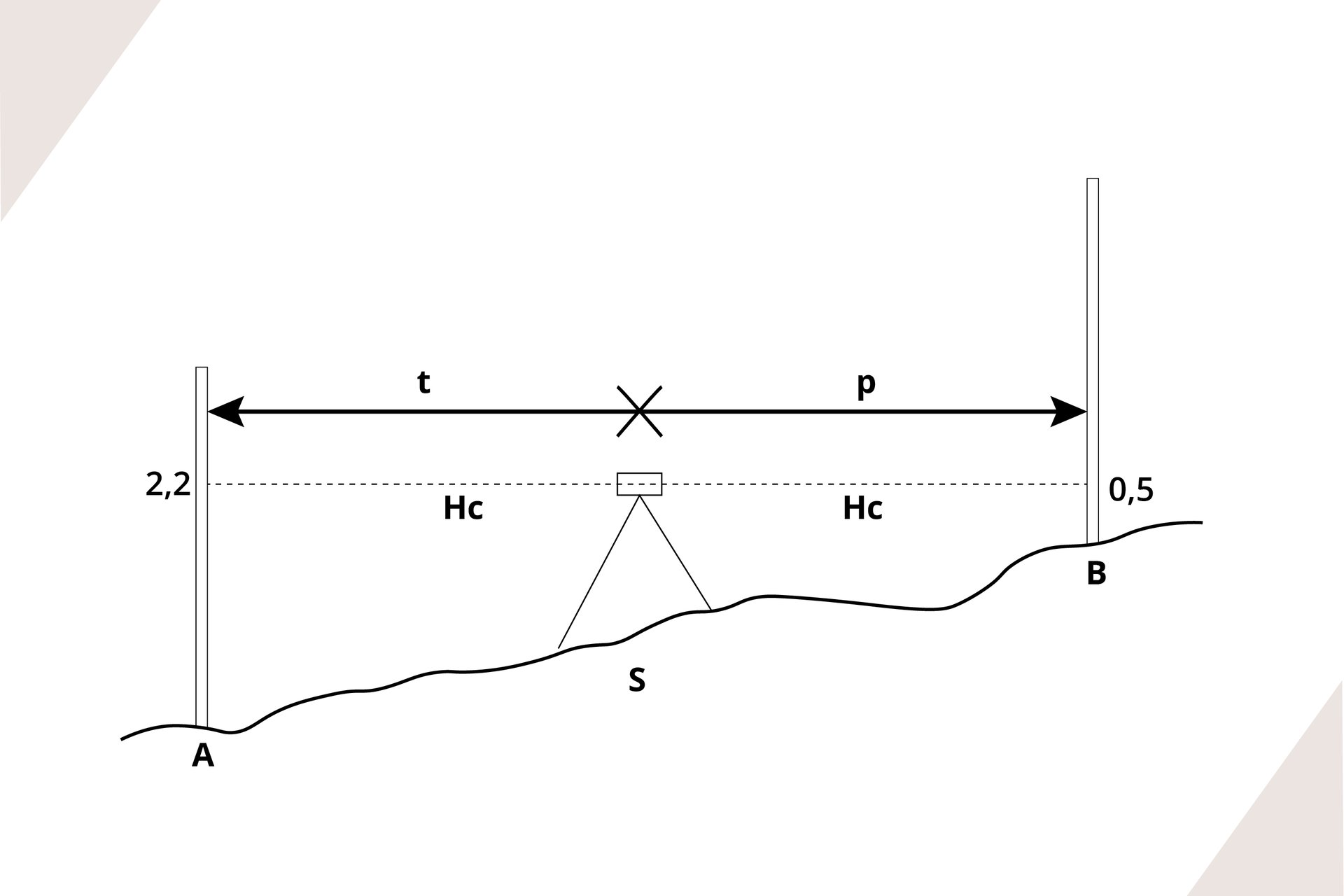
Niwelacja ze środka - polega na ustawieniu niwelatora nad punktem S, który znajduje się pośrodku odległości wyznaczonej przez stanowiska łat A, B. Odczyt na łacie A jest odczytem wstecz - t, natomiast z łaty B, odczytem w przód - p. Wysokość punktu B wynosi: HB = HA + t - p. Suma HA + t = Hc to wysokość płaszczyzny poziomej realizowanej nad terenem przez niwelator i nosi nazwę wysokości osi celowej Hc . Uwaga! Aby uniknąć pomyłek, należy na każdym stanowisku ze środka wykonać podwójny pomiar różnicy wysokości pomiędzy sąsiednimi punktami (drugi odczyt wykonywany po uprzedniej zmianie wysokości instrumentu).
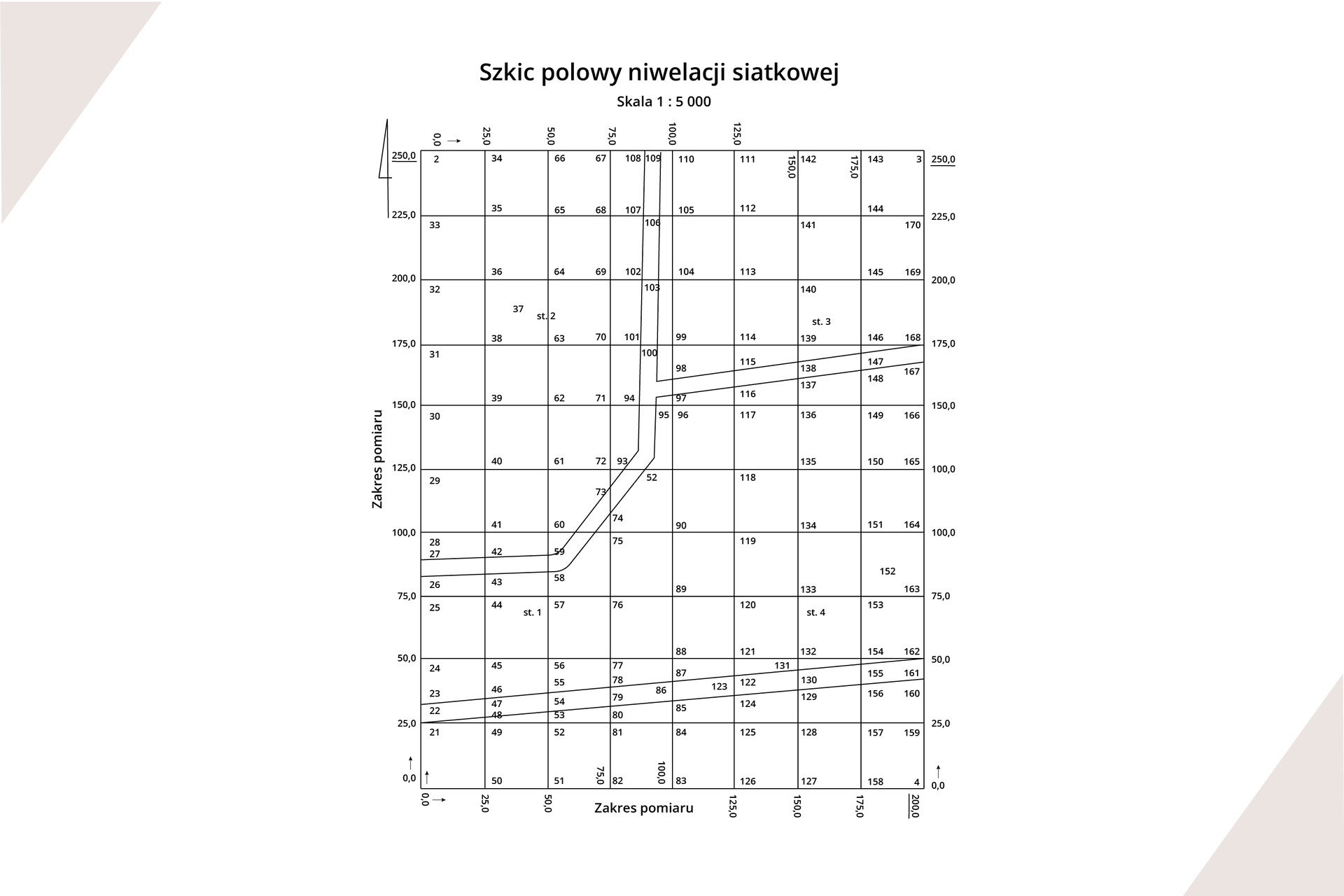
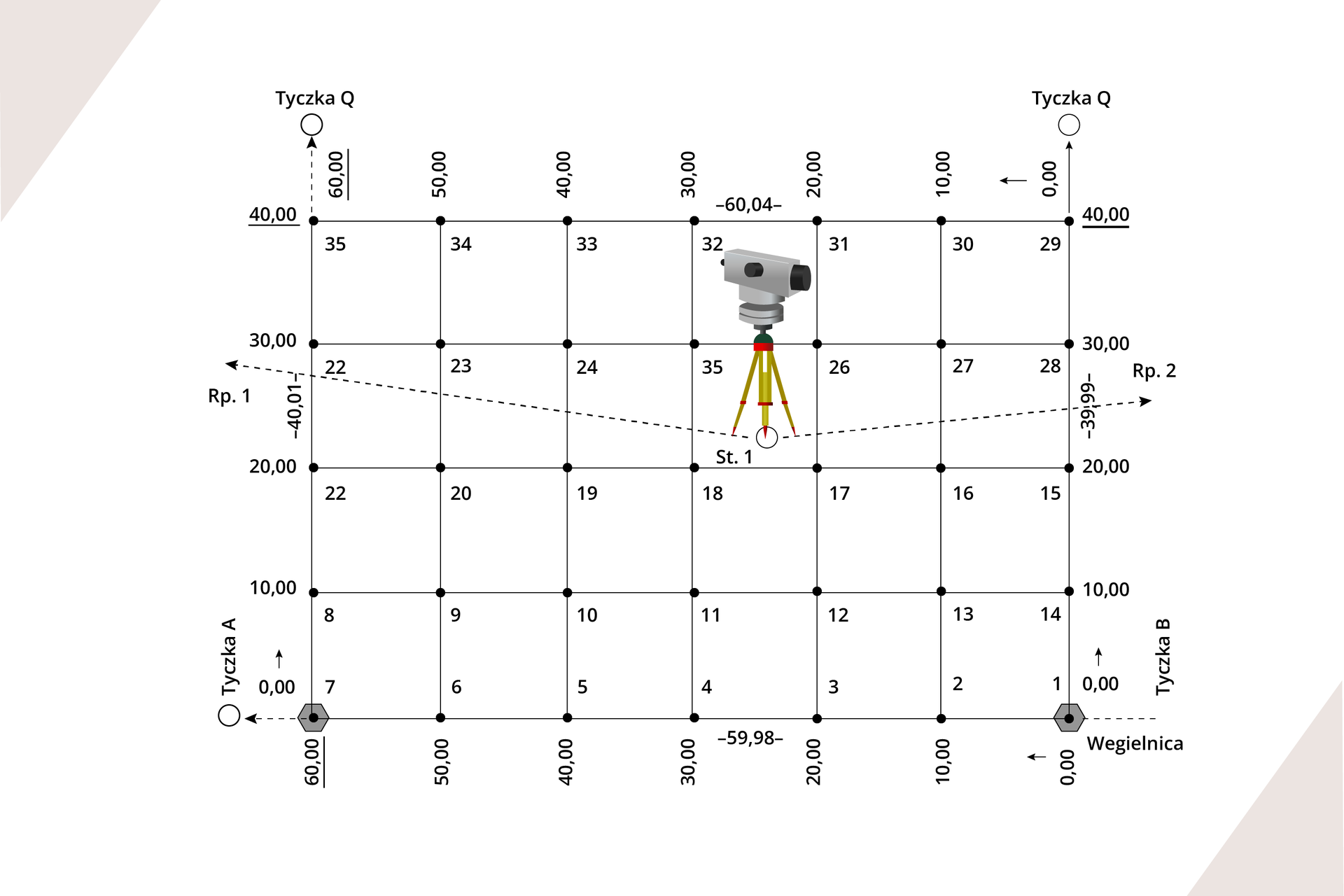
Niwelacja siatkowa stosowana jest do określenia różnic wysokościowych między punktami na obszarze o większym zasięgu. Pozwala na ustalenia dokładnych różnic wysokości pomiędzy wieloma regularnie rozmieszonymi punktami terenowymi, tworzącymi siatkę kwadratów.
Siatkę wytycza się na podstawie projektu w nawiązaniu do punktów osnowy poziomej. Na bokach figur podstawowych wyznacza się wierzchołki figur zapełniających. Pozostałe wierzchołki figur zapełniających wyznacza się jako punkty przecięcia prostych równoległych do boków figur podstawowych, z błędem nie większym niż 0,5 m. Wierzchołki figur podstawowych oznacza się w terenie palikami z wbitym gwoździem o wystającej główce, osadzonym równo z terenem. Obok umieszcza się dodatkowe paliki -świadki, wystające 15–20 cm ponad teren i opisane numerem punktu. Wierzchołki figur zapełniających oznacza się w terenie palikami, wystającymi 15–20 cm ponad teren dla ustawienia łaty obok nich napowierzchni terenu; paliki te opisuje się numerem punktu. Numerację wierzchołków podstawowych i zapełniających można przyjąć jako porządkową - kolejną, lub w pasy i słupy.
Niwelacja punktów rozproszonych polega na określeniu wysokości pikiet terenowych i punktów sytuacyjnych niwelacją geometryczną w przód przy równoczesnym wyznaczeniu ich położenia poziomego metodą biegunową w nawiązaniu do punktów osnowy geodezyjnej poziomej. Niwelację punktów rozproszonych stosuje się w przypadku pomiaru wysokościowego elementów szczegółów terenowych.
Niwelacja przekrojów stosowana jest do określania różnic wysokości między punktami na linii przekroju terenu. Jest to szczególnie przydatne w przypadku pomiarów na długich odcinkach, takich jak trasy drogowe, linie kolejowe czy kanały. Podczas niwelacji geometrycznej metodą niwelacji przekrojów, wykonuje się szereg pomiarów pionowych na określonych punktach na linii przekroju. Procedura niwelacji przekrojów polega na ustawieniu niwelatora na punkcie o znanej wysokości. Następnie, przy użyciu łaty niwelacyjnej, dokonuje się odczytów niwelacyjnych na kolejnych punktach przekroju. Odczyty niwelacyjne to pomiary różnicy wysokości pomiędzy instrumentem a punktem docelowym na przekroju. Na podstawie odczytów niwelacyjnych oblicza się różnice wysokości między kolejnymi punktami przekroju. Te różnice wysokości reprezentują profil terenu na linii przekroju i mogą być wykorzystane do tworzenia wykresów wysokościowych, analiz topograficznych czy przygotowywania projektów inżynierskich. . Podczas niwelacji przekrojów ważne jest uwzględnienie różnych czynników wpływających na dokładność pomiarów, takich jak zmienne warunki atmosferyczne, błędy instrumentalne czy przypadkowe.
Powrót do spisu treściPowrót do spisu treści
3. Niwelatory
Podstawowym instrumentem do wykonywania niwelacji geometrycznej jest niwelator. Składa się on ze spodarki ze śrubami poziomującymi oraz alidady z lunetą. Dodatkowo wyposażony jest w: limbus poziomy, urządzenia odczytowe, libellę pudełkową, śrubę zaciskową, leniwkę, śruby rektyfikacyjne.
Niwelator automatyczny (samopoziomujący) – w odróżnieniu od niwelatora libellowego - do samoczynnego poziomowania osi celowej lunety wykorzystuje urządzenie zwane kompensatorem, korygujące nieznaczne odchylenia osi celowej lunety od ustawienia poziomego.
Pod względem konstrukcji niwelatory dzielimy na:
libelowe, których oś celowa jest poziomowana ręcznie, na podstawie obserwacji wskazań libeli niwelacyjnej,
automatyczne optyczne, gdzie oś celowa jest poziomowana automatycznie za pomocą kompensatora, a odczyt wykonywany jest przez obserwatora
automatyczne cyfrowe, w których oś celowa jest poziomowana automatycznie za pomocą kompensatora, a odczyt na łacie, wyposażonej w kod paskowy jest samoczynnie wykonywany przez instrument i wyświetlany w postaci cyfrowej,
laserowe, które realizują płaszczyznę poziomą przez generowanie obrotowej wiązki światła laserowego.
Do prac niwelacyjnych używa się również różnej długości łat niwelacyjnych – służą one do pomiaru pionowej odległości od punktu, na którym usytuowana jest łata, do poziomu osi celowej niwelatora.
Powrót do spisu treściPowrót do spisu treści
4. Tachimetria
Tachimetria to pomiar sytuacyjno‑wysokościowy wykonywany przy zastosowaniu metody biegunowej do określenia położenia sytuacyjnego szczegółów terenowych oraz niwelacji trygonometrycznej do określania wysokości tych punktów. Pomiary tachimetryczne można wykonywać w terenie o dużych różnicach wysokości.
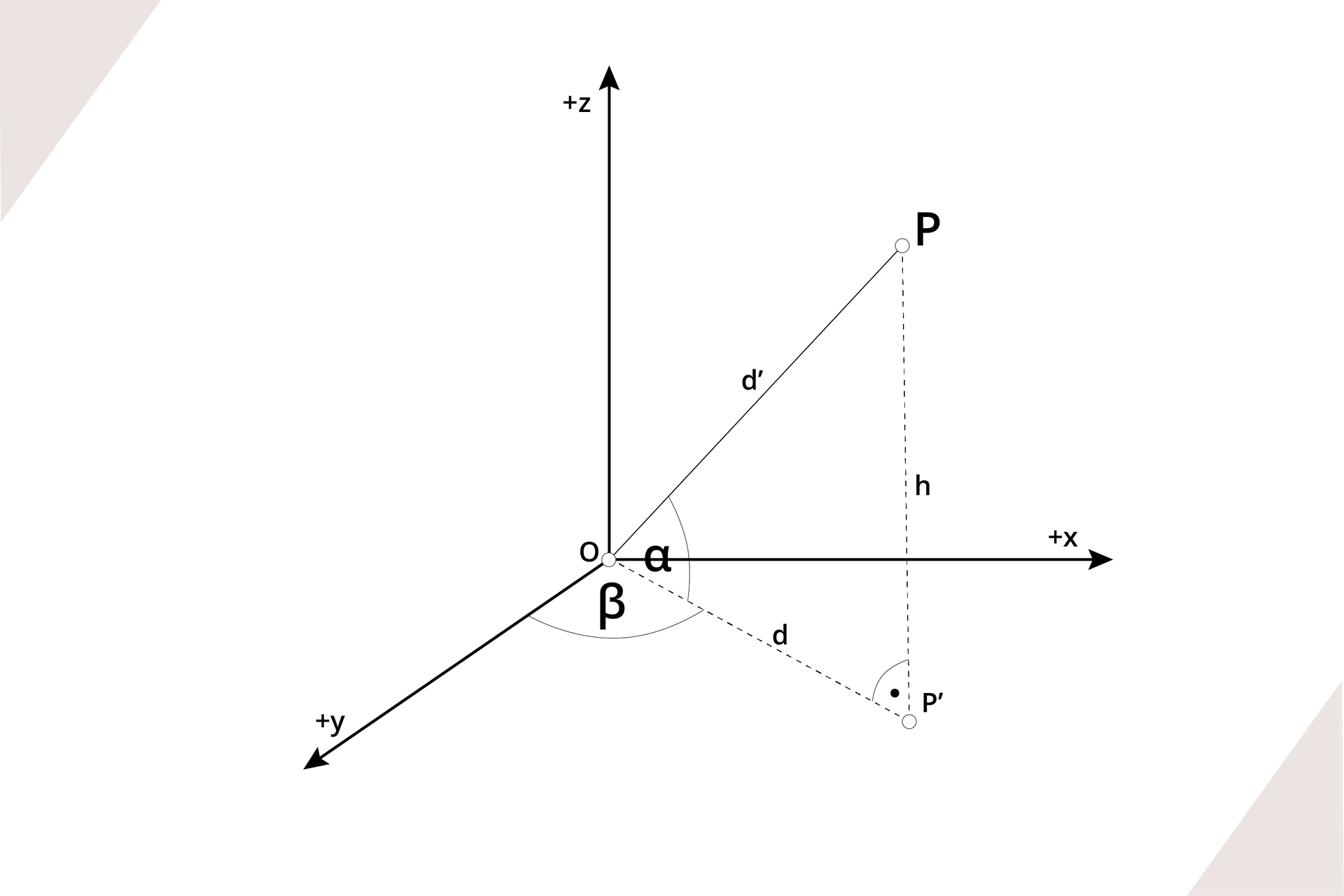
O – początek układu, alfa - kąt pionowy, beta - kąt poziomy, d - odległość pozioma, d' - odległość skośna, P - punkt mierzony
W tachimetrii wykorzystywane są tachimetry, obecnie najczęściej elektroniczne, które pozwalają na pomiar kątów i odległości za pomocą dalmierzy elektromagnetycznych.
Prace terenowe przy pomiarach tachimetrycznych obejmują:
- dokładny wywiad w terenie w celu wyboru stanowisk,
- wyznaczenie wzajemnego położenia stanowisk i ich wysokości,
- wyznaczenie położenia sytuacyjnego i wysokości szczegółów terenowych (pikiet).
Teren podczas pomiaru powinien być dobrze widoczny, zaś obrane stanowiska utrwalone w terenie, numerowane na bieżąco. Stanowiska muszą spełniać standardy osnowy pomiarowej czyli średni błąd położenia punktów nie może być większy niż 0,10 m względem najbliższych punktów poziomej osnowy geodezyjnej oraz nie większy niż 0,05 m względem najbliższych punktów wysokościowej osnowy geodezyjnej.
Dla punktów stanowiących osnowę pomiarową nie ma obowiązku sporządzania opisów topograficznych.
Powrót do spisu treściPowrót do spisu treści
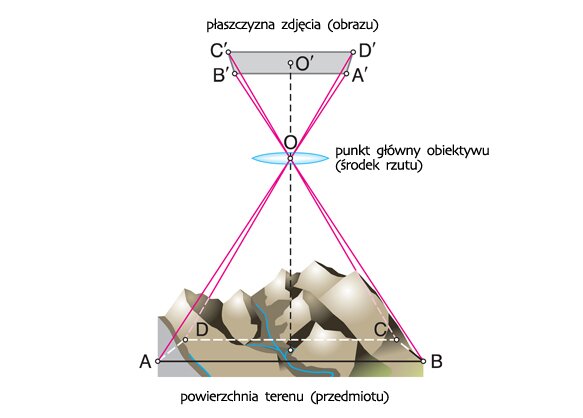
5. Fotogrametria
Fotogrametria polega na zastosowaniu odpowiednio wykonanych zdjęć fotograficznych (fotogrametrycznych) do pomiaru i odtwarzania pomiarów przestrzennych (współrzędnych) zdejmowanych obiektów oraz do sporządzania map sytuacyjnych i sytuacyjno‑wysokościowych.
W rozwoju fotogrametrii wyróżnia się trzy fazy: pierwsza z nich była fazą fotogrametrii analogowej, w fazie drugiej rozwinęła się fotogrametria analityczna, w fazie trzeciej, obecnej, zaznacza się dominacja fotogrametrii cyfrowej.
Fotogrametria analogowa to dział fotogrametrii, w którym stosuje się urządzenia i instrumenty analogowe o konstrukcji mechanicznej i optycznej, umożliwiające odtwarzanie trójwymiarowych związków geometrycznych pomiędzy obiektami fotografowanymi i zdjęciami fotogrametrycznymi.
Fotogrametria analityczna to dział fotogrametrii, w którym stosuje się komputery do numerycznego przetwarzania zarejestrowanych współrzędnych punktów obserwowanych na zdjęciach fotogrametrycznych. Fotogrametria ta ograniczyła stosowanie kosztownych urządzeń i pracochłonnych technik fotogrametrii analogowej.
Fotografia cyfrowa to dział fotogrametrii, w którym stosuje się komputerowe przetwarzanie obrazów fotogrametrycznych uzyskiwanych przez skanowanie zdjęć fotogrametrycznych lub bezpośrednio za pomocą cyfrowych kamer fotogrametrycznych.
W zależności od celu pomiarów można ją podzielić na topograficzną i nietopograficzną.
Ze względu na sposób wykonywania zdjęć fotograficznych dzielimy ją na:
- fotogrametrię naziemną (terrofotogrametria),
- fotogrametrię lotniczą (aerofotogrametrię).
W fotogrametrii naziemnej zdjęcia fotogrametryczne wykonujemy ze stanowisk naziemnych za pomocą kamery stereometrycznej lub fototeodolitu, czyli kamery fotograficznej i teodolitu zmontowanych na wspólnej osi pionowej.
W fotogrametrii lotniczej zdjęcia wykonywane są z powietrza za pomocą kamer lotniczych, umieszczonych na samolocie lub helikopterze.
W zależności od sposobu wykorzystania zdjęć fotogrametrię możemy podzielić na:
- fotogrametrię płaską (jednoobrazową), w której do opracowywania wykorzystywane są pojedyncze zdjęcia, na podstawie których można wykreować fotoszkice i fotomapy, a następnie mapy kreskowe sytuacyjne,
- fotogrametrię przestrzenną (dwuobrazową), zwaną również stereofotogrametrią.
Fotoszkice to szereg odbitek zdjęć fotogrametrycznych, bez skali i warstwic, naklejonych na wspólnym arkuszu, po uprzednim uzgodnieniu styków. Zdjęcia powinny być równej wysokości i nie zachodzić na siebie.
Fotomapa to odbitki zdjęć fotogrametrycznych przetworzone za pomocą przetwornika na żądaną skalę, zwykle jest to 1 : 5000, i naklejone na wspólny arkusz (sekcję). Zestawienie fotomapy opiera się nie tylko na sytuacji, ale przede wszystkim na punktach dostosowania, czyli tzw. fotopunktach.
Błąd położenia punktu na fotomapie w skali mapy dochodzi ± 1 mm.
Opracowania fotogrametrii przestrzennej opiera się na dwóch zdjęciach tego samego obiektu, wykonywanych z dwóch różnych stanowisk. Zdjęcia takie stanowią razem tzw. stereogram, a odległość pomiędzy stanowiskami zdjęć nazywamy bazą zdjęć. Opracowania stereofotogrametryczne dają możność sporządzania map sytuacyjno‑wysokościowych.
Powrót do spisu treściPowrót do spisu treści
6. Skanowanie powierzchni
Pomiar sytuacyjno‑wysokościowy przy zastosowaniu naziemnych skanerów laserowych polega na skanowaniu, punkt po punkcie, obiektów terenowych z różnych stanowisk rozmieszczonych w taki sposób, aby obiekty były uchwycone kompletnie. W wyniku skanowania powstają olbrzymie zbiory punktów (chmury punktów), które pozwalają z geodezyjną dokładnością zbudować trójwymiarowe modele obiektów terenowych.
Skanery to połączenie dalmierza świetlnego i precyzyjnego skanera działającego poprzez wysyłanie impulsów świetlnych przez pionowo wirujące zwierciadło umieszczone na obracającej się w poziomie głowicy. Skaner ów uzyskuje pole widzenia w poziomie – 360°, a w pionie – 310°.
Dokładność określenia pozycji punktu waha się od kilku do kilkunastu milimetrów i uzależniona jest od odległości i zdolności odbijania światła przez powierzchnie obiektów; jest różna w pionie i poziomie.
Naziemny skaning laserowy zapewnia bardzo dokładne, trójwymiarowe obrazy pozwalające np. projektantom pracować bezpośrednio na rzeczywistych modelach, wspomagając proces projektowania.
Zalety stosowania skaningu laserowego:
– szybkość – skaner laserowy skraca czas potrzebny na realizacje inwentaryzacji – w ciągu sekundy mierzy do 1 mln punktów;
– precyzja – powstała w wyniku skanowania chmura punktów dostarcza dokładnej informacji o obiekcie i jego powierzchni – dokładność pomiaru sięgająca nawet 2 mm;
– kompletność danych – kompleksowa informacja o obiekcie gwarantuje pełną analizę w dowolnym czasie.
Skanowanie powierzchni może odbywać się również przez skaning lotniczy i mobilny. Skaning lotniczy to technika zbierania danych za pomocą samolotów lub dronów wyposażonych w skanery laserowe i kamery. Skaning mobilny to technika zbierania danych, która wykorzystuje specjalne pojazdy wyposażone w skanery laserowe, kamery i inne przyrządy pomiarowe. Pojazdy wykorzystywane z skaningu mobilnym to np.: samochody czy łodzie, które wyposażone w wyżej wspominane urządzenia, zbierają dane z powierzchni obszaru, po którym się poruszają. Skanowanie mobilne jest wykorzystywane do zbierania danych z trudno dostępnych lub dynamicznych środowisk takich jak miasta.
Powrót do spisu treściPowrót do spisu treści
7. Pomiary satelitarne
Metody satelitrane pomiarów sytuacyjno‑wysokościowych wykorzystują sygnał GPS lub GNSS do określania pozycji i wysokości punktów na powierzchni Ziemi. Wyróżnia się trzy metody takich pomiarów:
Metoda statyczna, w której odbiornik GNSS jest umieszczany na jednym punkcie przez dłuższy czas, zwykle od kilkudziesięciu minut do kilku godzin. Odbiornik zbiera sygnały satelitarne i rejestruje pomiary pozycji i czasu. Po zakończonym pomiarze dane są przetwarzane w celu wyznaczenia pozycji i wysokości punktu mierzonego. Metoda ta jest stosowana gdy wymagana jest bardzo wysoka dokładność.
W metodzie RTK (Real Time Kinematic) odbiornik GNSS jest używany w połączeniu ze stacją referencyjną, która znajduje się na punkcie o znanych współrzędnych, np. punkcie osnowy geodezyjnej. Stacja ta przesyła dane korekcyjne do odbiornika GNSS w czasie rzeczywistym. Odbiornik GNSS korzysta z tych danych różnicowych w celu dokładnego wyznaczenia pozycji i wysokości punktu mierzonego w czasie rzeczywistym. Metoda RTK jest stosowana, gdy wymagana jest wysoka dokładność pomiarów w czasie rzeczywistym, na przykład w pracach pomiarowych na budowach, przy precyzyjnym wyznaczaniu granic działek lub w nawigacji pojazdów.
Metoda RTN jest podobna do metody RTK, ale różni się tym, że dane różnicowe są przesyłane do odbiornika GNSS nie przez jedną stację referencyjną lecz poprzez sieć stacji. Zastosowane tutaj są poprawki powierzchniowe VRS (ang. Virtual Reference Station). Sieć taka składa się z wielu stacji referencyjnych rozmieszczonych na znanych punktach geodezyjnych. Odbiornik GNSS odbiera dane z sieci stacji i wykorzystuje je do dokładnego wyznaczenia pozycji i wysokości punktu mierzonego w czasie rzeczywistym. Metoda RTN (Real Time Network) pozwala na uzyskanie najwyższych dokładności w pomiarach satelitarnych w czasie rzeczywistym, a także powtarzalność otrzymywanych wyników.
Powrót do spisu treściPowrót do spisu treści
III. Błędy pomiarów
Źródła błędów podczas pomiarów szczegółów sytuacyjnych i wysokościowych można podzielić na:
osobiste
instrumentalne
naturalne
Geodeta nie ma wpływu na błędy instrumentalne czyli wynikające z niedoskonałości konstrukcji instrumentów pomiarowych lub też naturalne spowodowane zmianą warunków środowiska w jakich pomiar jest realizowany.
Do grupy błędów osobistych możemy zaliczyć błędy powstające podczas wykonywania pomiarów przez obserwatora. Eliminacja błędów a właściwie określanie ich wielkości również jest różnorodne. Czasem to odpowiednia metoda pomiaru, czasem ilość obserwacji nadliczbowych. Sposobem określenia wielkości błędów i ich wpływu na pomiar zajmuje się rachunek wyrównawczy. Do tej grupy zaliczamy również błędy: przybliżenia, przeoczenia oraz pomyłki (błędy grube).
Błędy przybliżenia wynikają z uproszczenia warunków pomiaru lub ze stosowania
przybliżonych wzorów.
Błędy przeoczenia (systematyczne) wynikają z niedokładności użytych przyrządów,
błędnej metody pomiaru lub działania trudno zauważalnych czynników zewnętrznych. Wykrycie źródła tych błędów systematycznych jest trudne i wymaga porównania użytych przyrządów ze wzorcem oraz dogłębnej analizy metody pomiaru.
Pomyłki (błędy grube) powstają na skutek fałszywego odczytania wskazań, błędnego
zapisania wyniku itp. Pomyłki dają się łatwo zauważyć i wyeliminować, ponieważ otrzymany wynik znacznie różni się od innych wyników pomiarów tej samej wielkości. Wynik uzyskany obarczony błędem grubym w dalszej analizie należy pominąć.
Błędy w geodezji powstają przez wpływ różnych czynników, najważniejsze jest ich świadome rozpoznanie, analizowanie i eliminowanie. W celu minimalizowania wystąpienia:
błędów osobowych, wynikających z niedoskonałości operatora należy dbać o przeszkolenie obserwatora, regularną kalibrację przyrządów, precyzyjne odczytywanie danych oraz stosowanie odpowiednich technik,
błędów instrumentalnych należy regularnie kalibrować i sprawdzać instrumenty oraz stosować odpowiednie procedury obsługi, konserwacji instrumentów oraz ich przechowywania,
błędów wynikających z warunków atmosferycznych należy stosować techniki kompensacyjne, takie jak stosowanie korekcji refrakcyjnej lub należy dokonywać pomiarów w określonych warunkach meteorologicznych,
błędów grubych należy dbać o poprawność przebiegu pomiaru, a w przypadku ich wystąpienia powtórzyć pomiar lub skorygować dane na podstawie innych niezależnych źródeł.
Powrót do spisu treściPowrót do spisu treści
Podstawa prawna:
Rozporządzenie Ministra Rozwoju w sprawie standardów technicznych wykonywania pomiarów sytuacyjnych i wysokościowych oraz opracowywania i przekazywania wyników tych pomiarów do państwowego zasobu geodezyjnego i kartograficznego z dnia 18 sierpnia 2020 r. (Dz. U. 2022, poz. 1670).
Rozporządzenie Ministra Rozwoju Regionalnego i Budownictwa w sprawie ewidencji gruntów i budynków z dnia 29 marca 2001 r. (Dz. U. 2019, poz. 393, tekst jednolity z dnia 3 stycznia 2019 r.).
Rozporządzenie Rady Ministrów w sprawie państwowego systemu odniesień przestrzennych z dnia 15 października 2012 r. (Dz. U. 2012, poz. 1247).
Rozporządzenie Rady Ministrów zmieniające rozporządzenie w sprawie państwowego systemu odniesień przestrzennych z dnia 19 grudnia 2019 r. (Dz. U. 2019, poz. 2494).
Ustawa Prawo geodezyjne i kartograficzne z dnia 17 maja 1989 r. (Dz. U. 2020, poz. 276, tekst jednolity z dnia 28 stycznia 2020 r.).
Powrót do spisu treściPowrót do spisu treści
Bibliografia:
Jagielski A., Geodezja I w teorii i praktyce, część pierwsza, GEODPIS, wyd. 4, Kraków 2019.
Jagielski A., Przewodnik do ćwiczeń z geodezji II, Geodpis, Warszawa 2009.
Kosiński W., Geodezja, Wydawnictwo Naukowe PWN, Warszawa 2010.
Kruszewski P., Geodezja w praktyce, Kabe, Krosno 2018.
Malarski R., Geodezyjne pomiary szczegółowe. Klasyczne metody pomiarowe sieci geodezyjnych, Oficyna Wydawnicza Politechniki Warszawskiej, Warszawa 2021.
Powrót do spisu treściPowrót do spisu treści