Wektory dla każdego
W życiu wyróżniamy dwa rodzaje wielkości, wielkości skalarne i wielkości wektorowe. Bardzo ważne jest prawidłowe posługiwanie się szczególnie wielkościami wektorowymi. W poniższym materiale znajdziesz programy ilustrujące: metodę dodawania wektorów, metodę rozkładu wektorów na składowe i zasadę równowagi trzech sił.
utrwalisz graficzne metody dodawania wektorów,
przećwiczysz rozkładanie wektorów względem różnych kierunków,
przeanalizujesz rozkład sił działających w doświadczeniu
równowaga trzech sił
,zobaczysz rozkład sił na równi pochyłej.
Wielkości skalarne
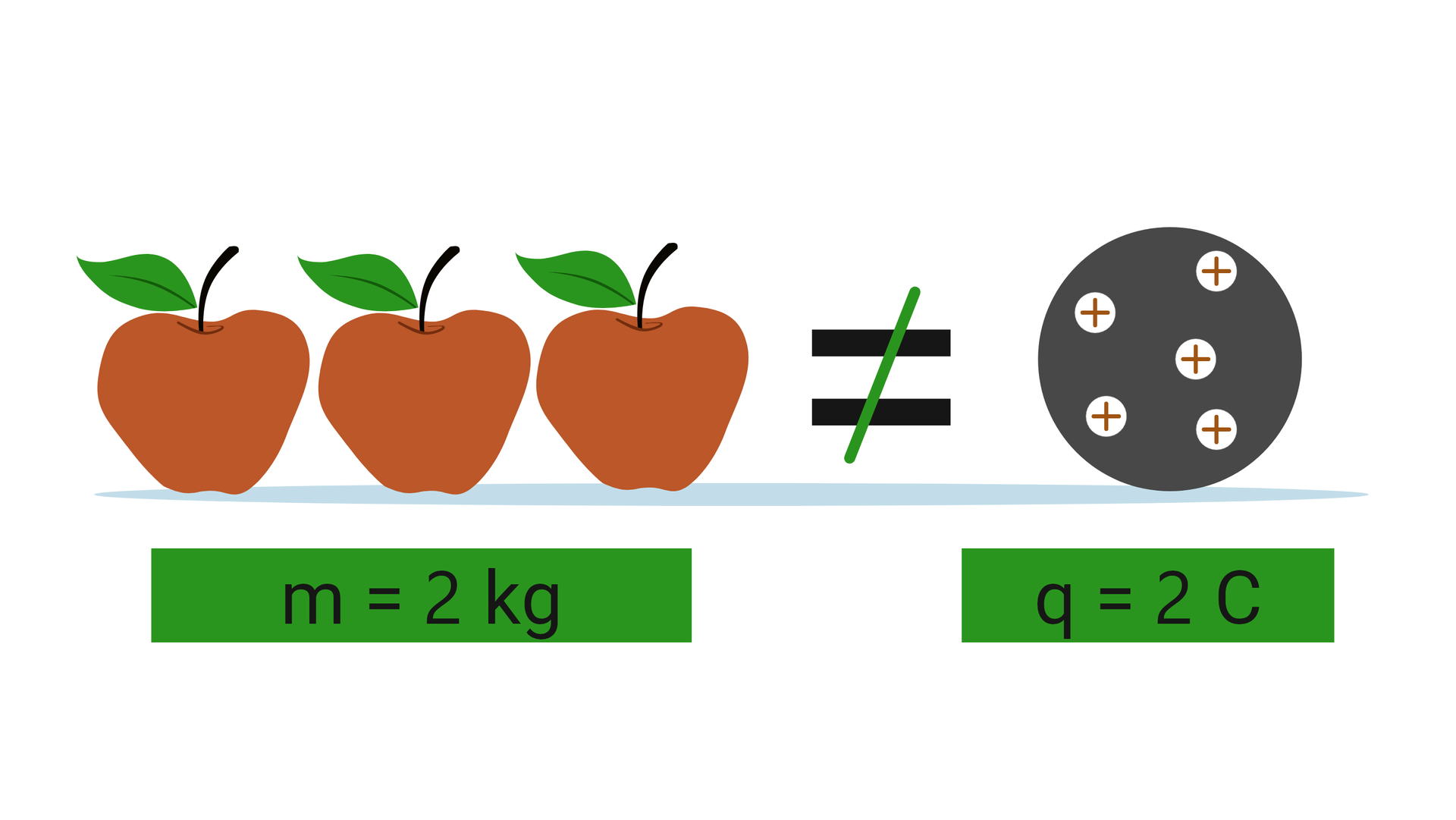
Wielkości skalarne są to wielkości fizyczne, które charakteryzowane się tylko przez jedną liczbę rzeczywistą wraz z odpowiednią jednostką. Przykładem wielkości fizycznej skalarnej jest np.: droga, energia, masa, czas czy ładunek elektryczny.
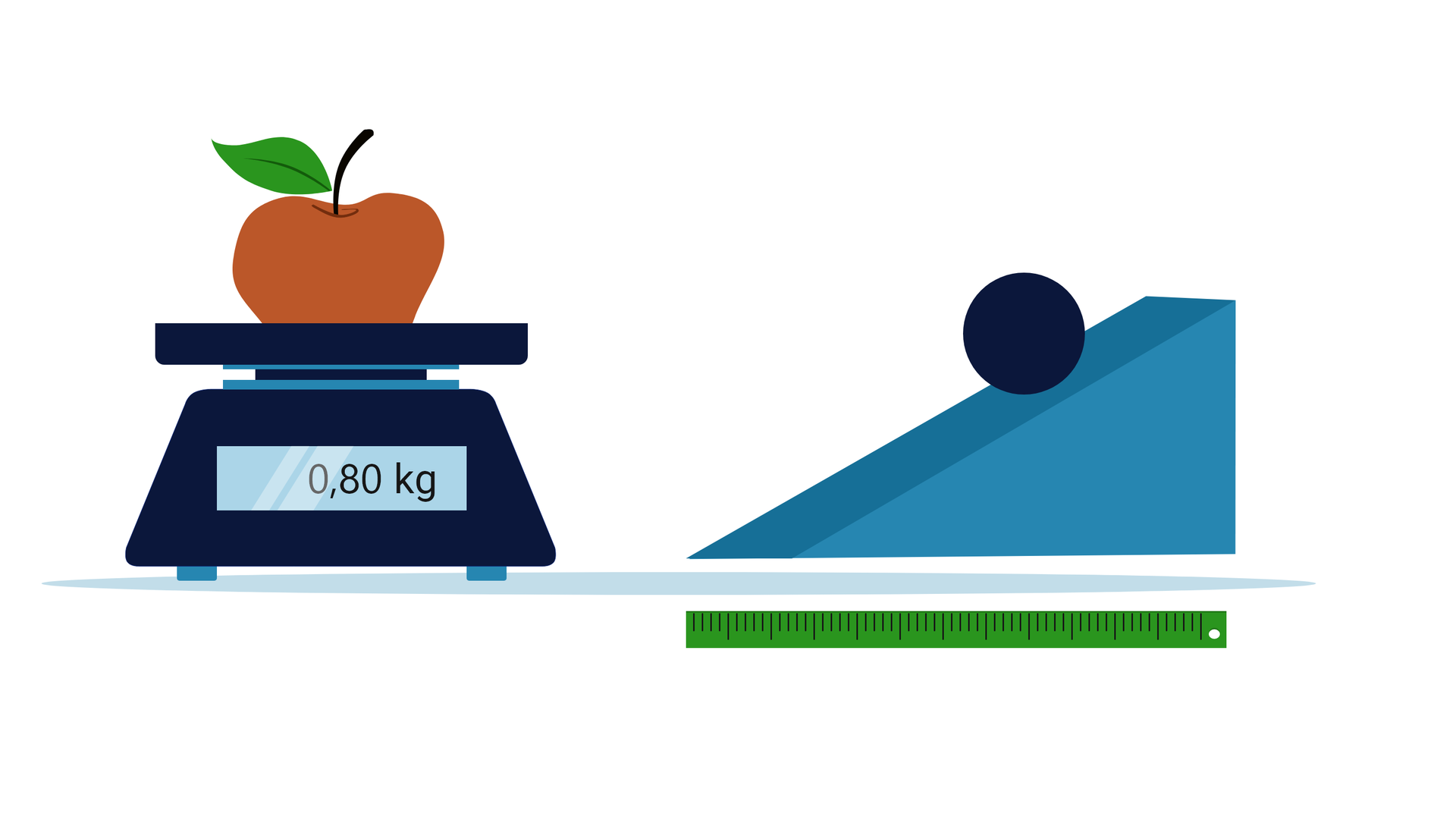
Pamiętaj, że poza liczbą w przypadku wielkości fizycznych ważna jest także jednostka! Dwa kilogramy jabłek nie mogą równać się dwóm kulombom ładunku elektrycznego.
Pamiętaj, że w przypadku obliczeń dodawać możesz tylko dwie wielkości fizyczne, których jednostka jest taka sama.
Wielkości wektorowe
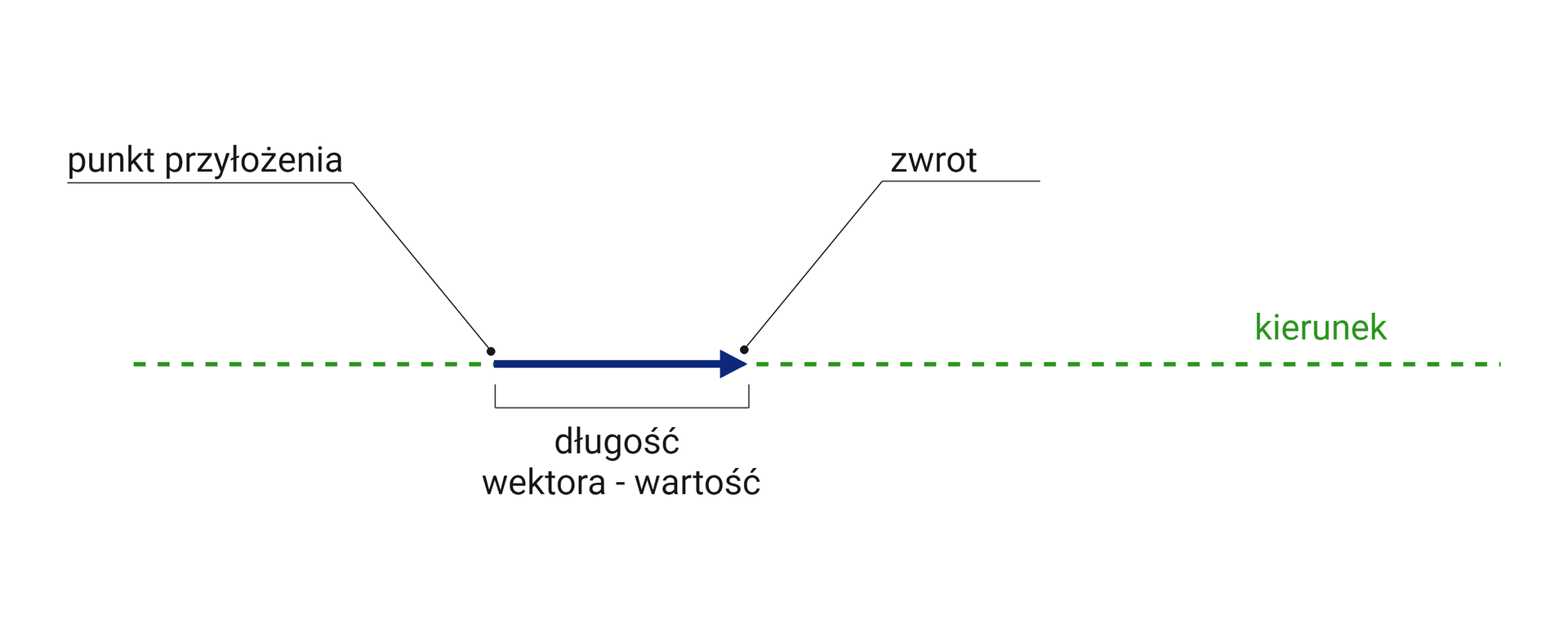
Wielkości wektorowe są to wielkości fizyczne, które poza swoją wartości posiadają także kierunek, zwrot i punkt przyłożenia. Przykładami takich wielkości są: siłasiła, przyspieszenie, prędkośćprędkość czy pęd. W przypadku wielkości wektorowych poza samą wartością bardzo ważny jest kierunek działania opisywany przez kierunek (prostą na której lewy wektor) i zwrot (orientacją wektora na tej prostej).
Wartości wielkości posiada także odpowiednią jednostkę np. w przypadku siły jest to niuton , a prędkośćprędkość może to być .
Działania na wektorach
Dodawanie czy odejmowanie wielkości fizycznych wektorowych nie jest już takie proste jak w przypadku wielkości skalarnych. Poza tym, występuje także nowy rodzaj operacji - rozkład wektora na składowe. Mnożenie wektorów w sensie podobnym jak w przypadku wielkości skalarnych nie występuje.
Dodawanie wektorów
W przypadku wektorów ze względu na to, że poza ich długością ważny jest także kierunek działania, nie możemy wektorów dodawać, dodając po prostu ich wartości. Dodawać możemy tylko wektory mające ten sam punkt przyłożenia. Możemy rozpatrzyć kilka przypadków wektorów do dodania:
gdy wektory mają ten sam kierunek,
nie ma tego samego kierunku.
Graczne dodawanie wektorów możemy wykonać na dwa sposoby.
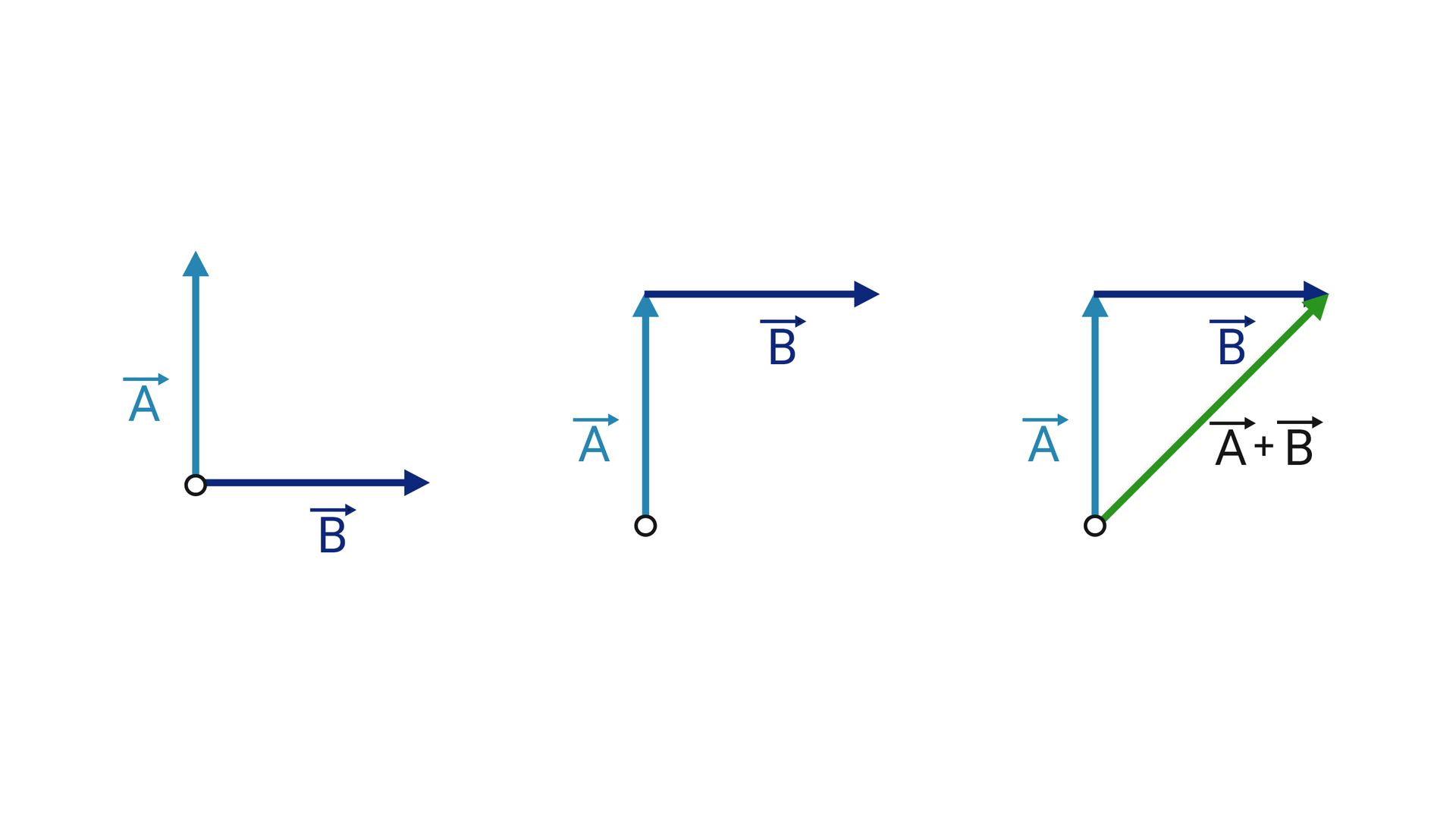
Metoda równoległoboku
Ta metoda służy do dodawania tylko dwóch wektorów. Aby dodać dwa wektory należy:
narysować nowe wektory o tej samej długości kierunku i zwrocie jak dodawane wektory tak, aby początek każdego z nowych wektorów znajdował się w końcu drugiego z wektorów, w ten sposób powinien powstać równoległobok,
narysować wektor mający początek w punkcie, w którym początek miały dodawane wektory i koniec w punkcie, w którym mają końce przesunięte równolegle wektory, wektor ten leży na tej przekątnej równoległoboku, której jeden z końców jest w punkcie przyłożenia obydwu dodawanych wektorów. Wektor ten jest sumą tych dwóch wektorów.
Sposób postąpowania zilustrowany jest na grafice poniżej.
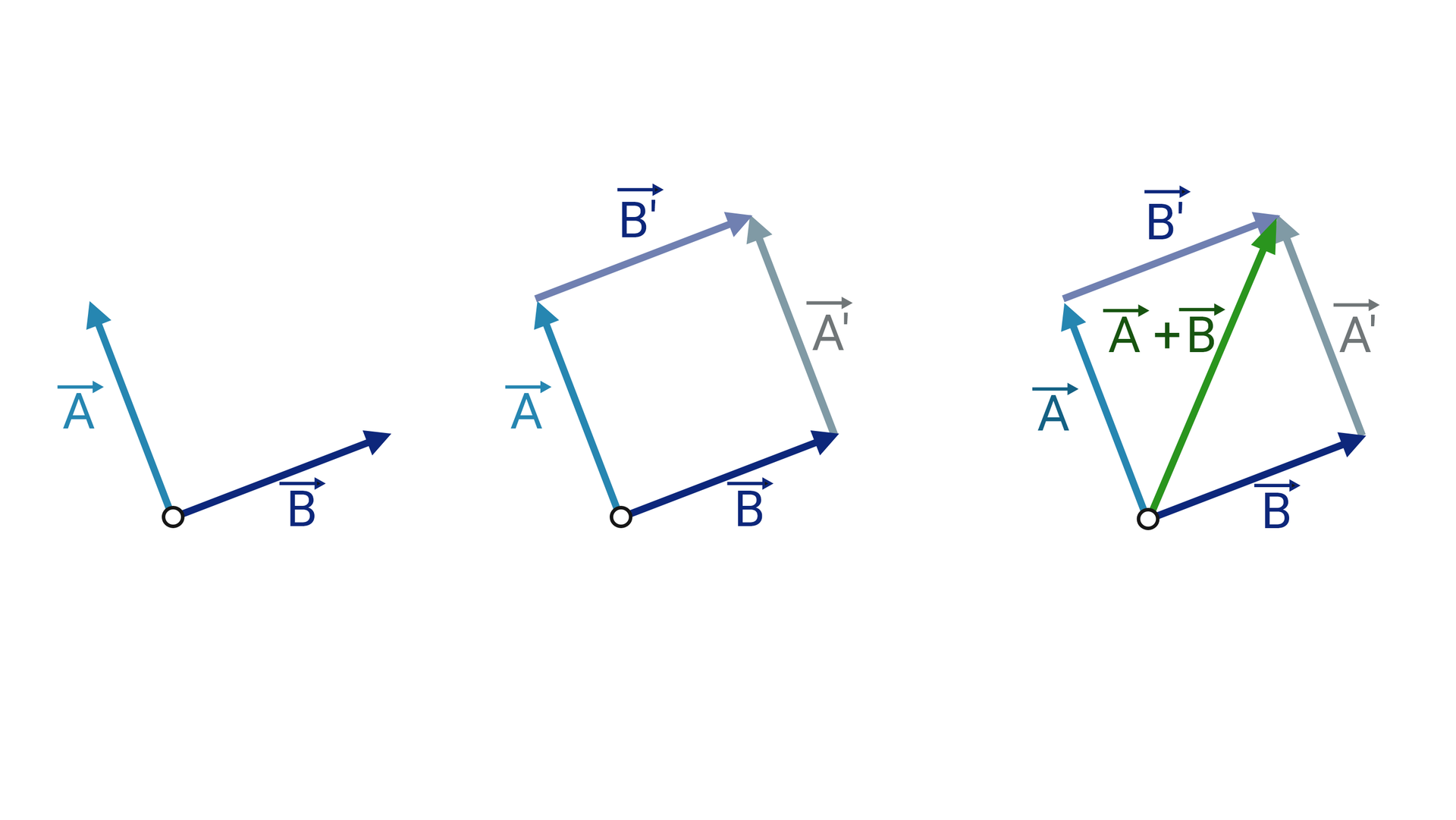
Zauważ, że wynikowy wektor nie musi mieć długości równej sumie długości wektorów dodawanych.
Metoda trójkąta
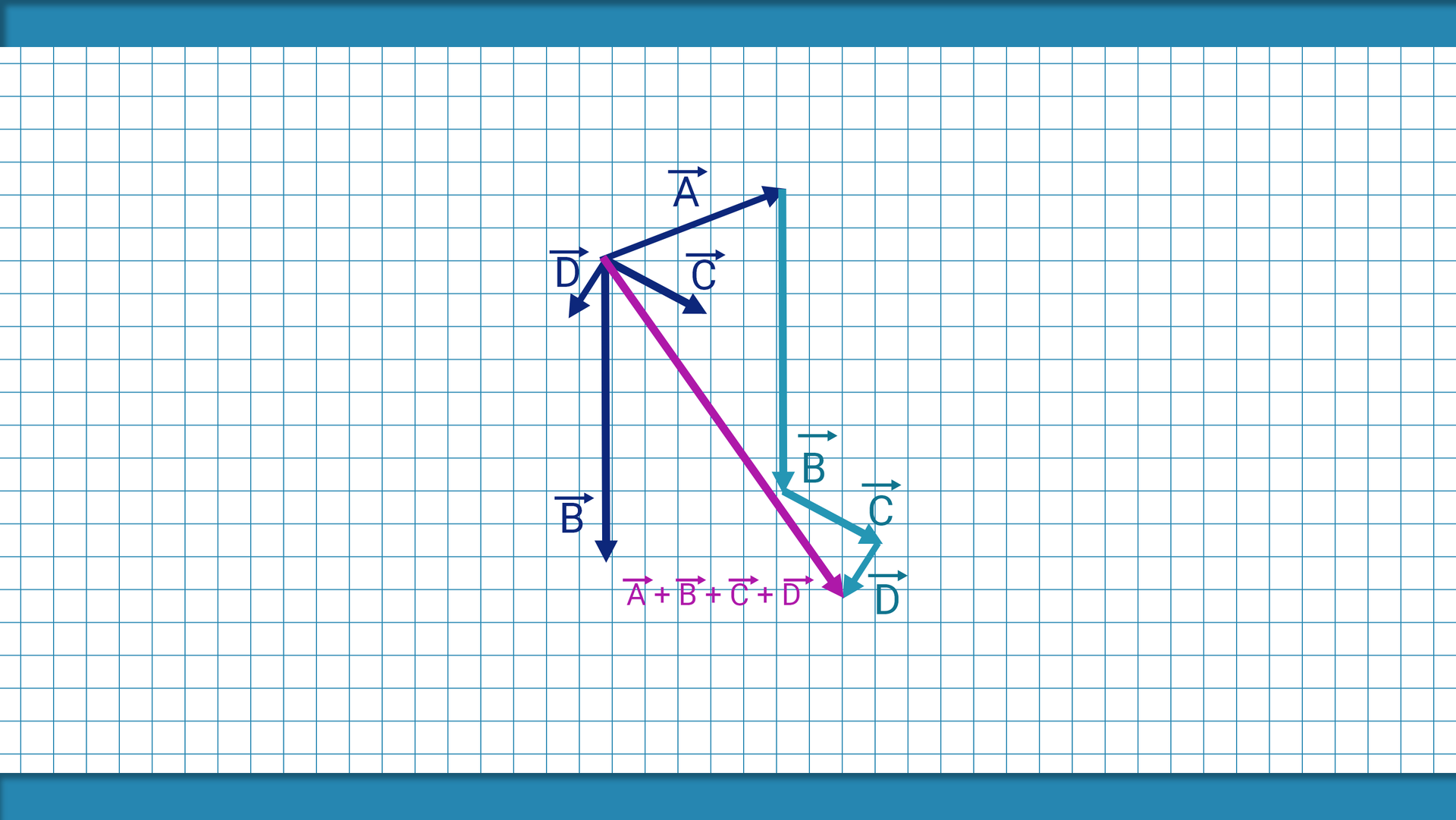
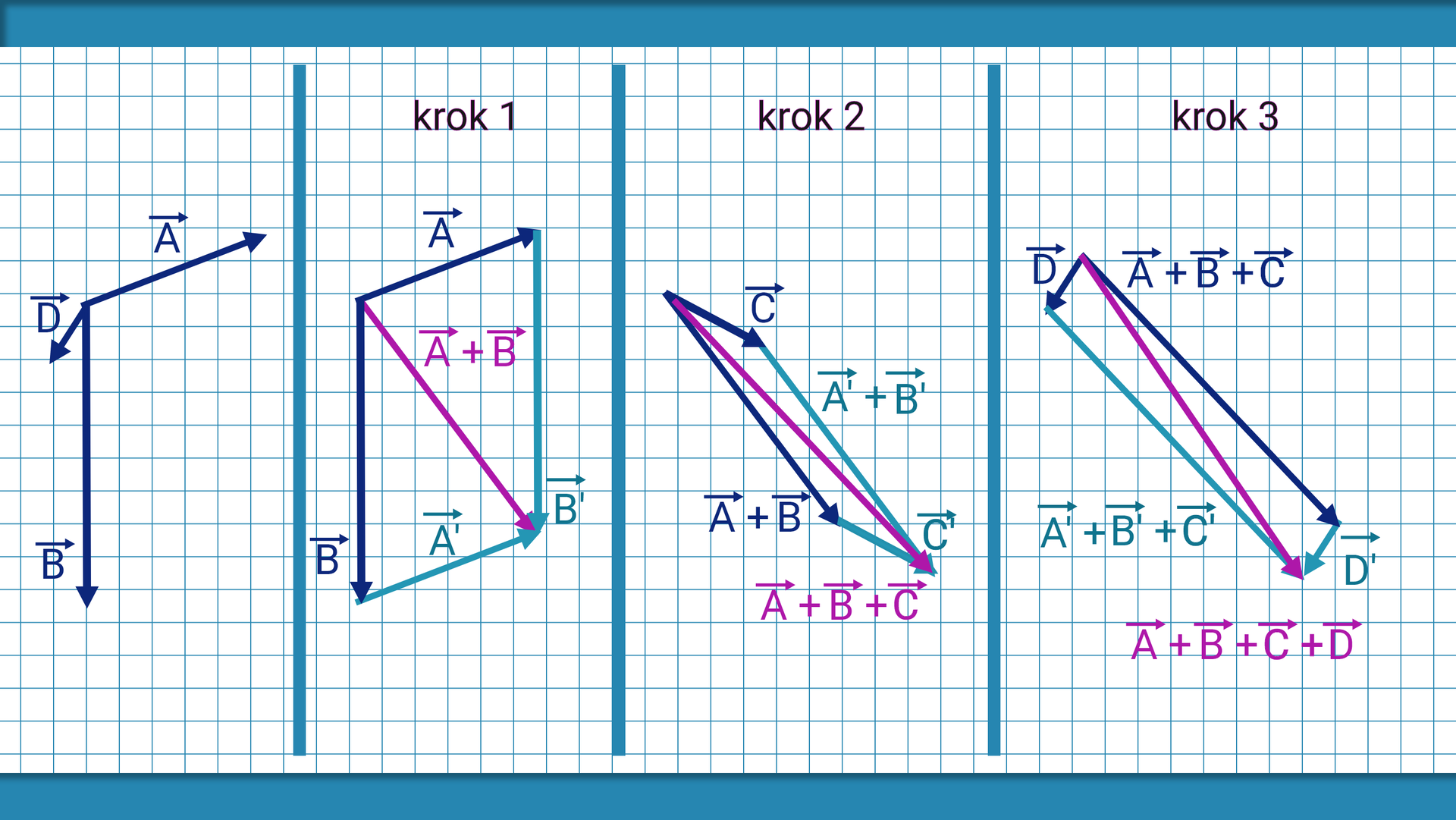
Druga metoda może być wykorzystana do dodawania dwóch i więcej wektorów. Aby z jej pomocą znaleźć wektor będący sumą kilku wektorów należy:
po kolei przenosić równolegle wektory tak aby punkt końcowy pierwszego wektora był punktem przyłożenia drugiego, punkt końcowy drugiego był punktem przyłożenia trzeciego itd.
narysować wektor mający punkt przyłożenia w punkcie przyłożenia pierwszego wektora i koniec w punkcie końcowym ostatniego wektora, wektor ten jest wynikiem dodawania tych wektorów.
Sposób postąpowania zilustrowany jest na grafice poniżej.
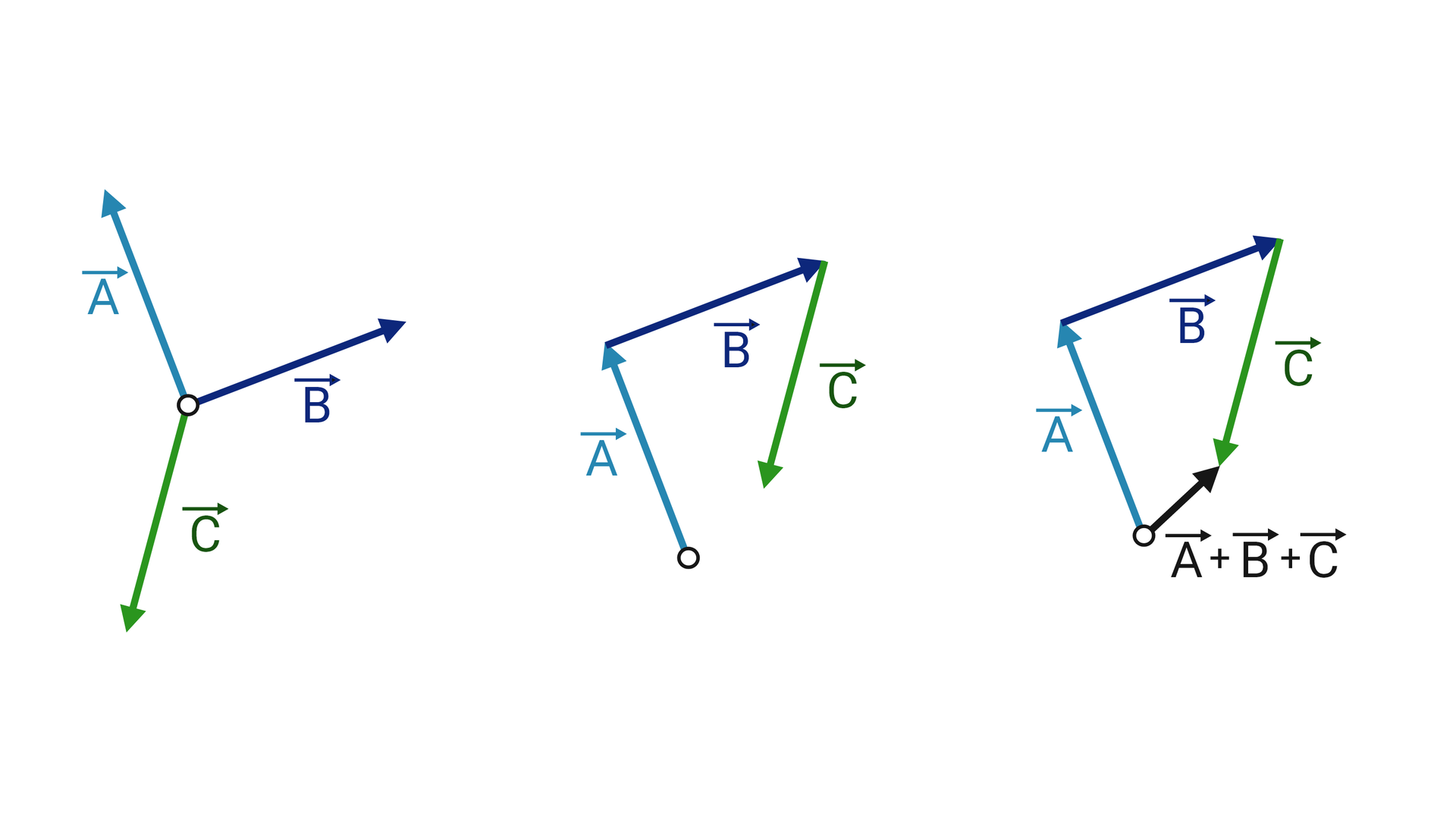
Metoda ta bierze swoją nazwę z figury jaka powstaje po przesunięciu i narysowaniu wektora wynikowego w przypadku dodawania dwóch wektorów.
W przypadku dodawania więcej niż dwóch wektorów powinniśmy ją nazywać metodą wieloboku.
Metodę tę wykorzystuje zamieszczony w tym materiale program.
Odejmowanie wektorów
Gdy odejmujemy wektor od wektora to możemy to równoważnie rozpatrzyć jako dodawanie do wektora wektora . Wektor nazywany jest wektorem przeciwnymwektorem przeciwnym do wektora i ma taką samą długość i kierunek jak wektor , lecz przeciwny zwrot.

Stąd odejmowanie wektorów możesz wykonać wykorzystując metody dodawania wektorów.
Rozkład wektora na składowe
Wektor można rozłożyć także na wektory składowe. Jest to niejako operacja odwrotna do dodawania wektorów. Chcąc poznać wektory, które zostały dodane, aby powstał dany wektor należy wybrać dwie proste przechodzące przez początek rozkładanego wektora oraz:
narysować proste równolegle do zadanych prostych przechodzące przez koniec wektora rozkładanego na skladowe,
narysować na każdej prostej wektor mający punkt przyłożenia w puncie, w którym ma punkt przyłożenia rozkładany wektor, a punkt końcowy w punkcie przecięcia prostych, wektor ten zawierać ma się w jednej z zadanych prostych. Drugi wektor powstaje analogicznie.
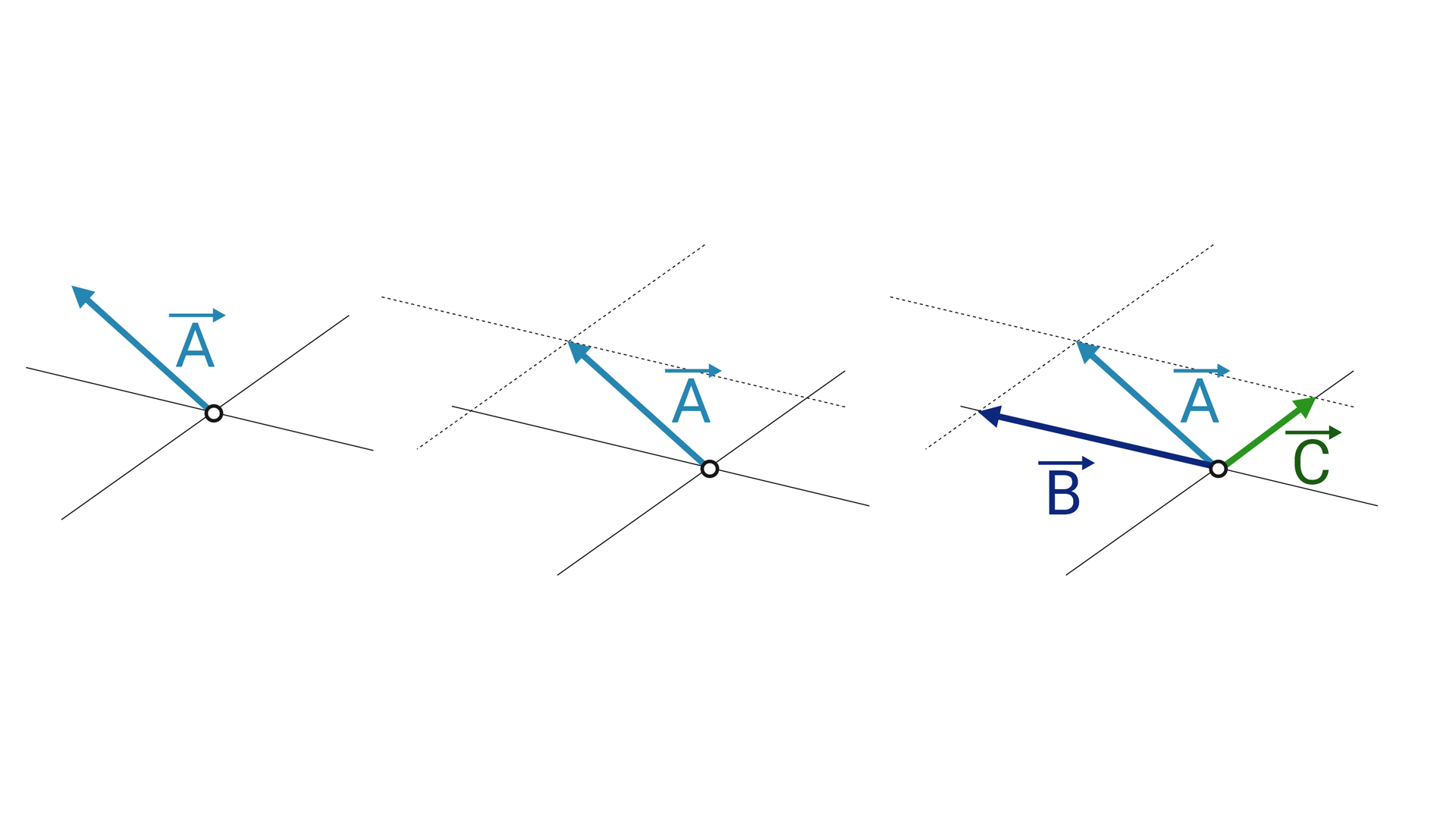
Szczególnym przypadkiem tej operacji, często wykorzystywanym w życiu, jest rozkład wektora na składowe prostopadłe zilustrowany na grafice poniżej.
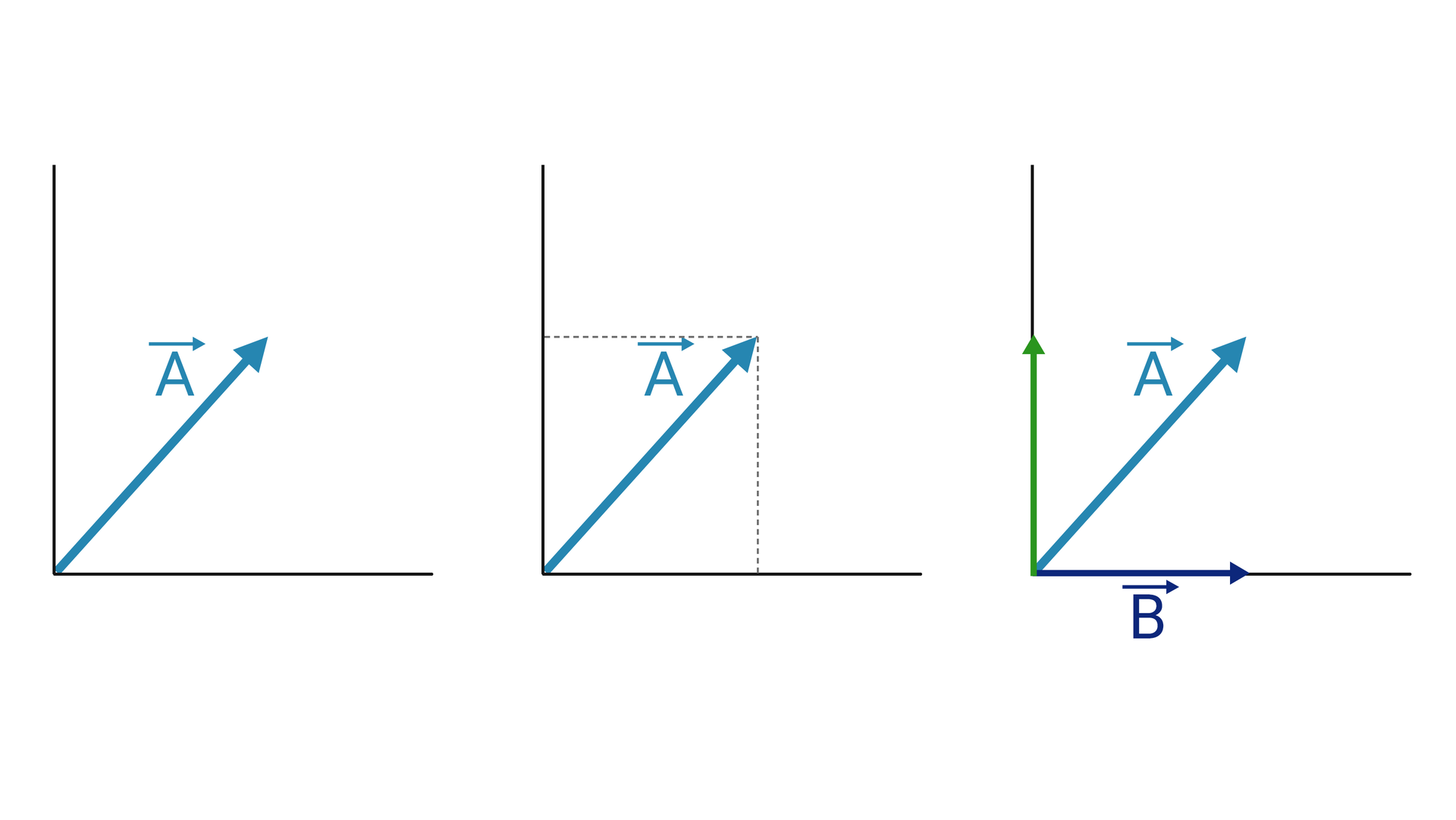
Przeprowadzenie tej operacji obrazuje druga część programu.
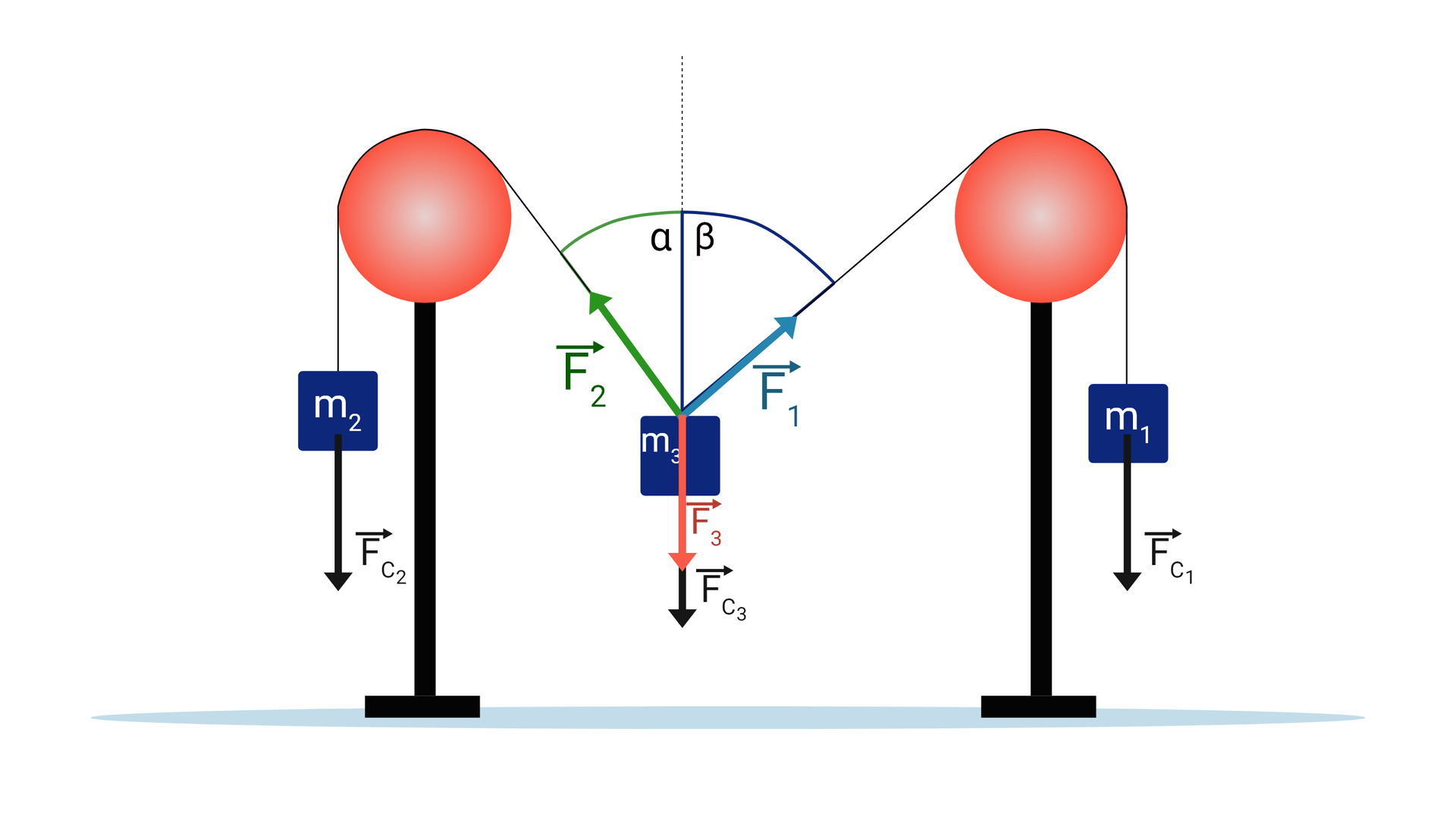
Równowaga trzech sił
Trzy siły znajdują się w równowadze kiedy:
proste na których leżą zawierają się w jednej płaszczyźnie oraz przecinają się w jednym punkcie,
wektory sił tworzą trójkąt.
Najprościej sytuację tę możemy zobaczyć gdy na cienkiej i nieważkiej lince powieszone zostaną trzy ciężarki: dwa na końcach i jeden pośrodku. Wtedy gdy masa dowolnych dwóch ciężarków jest większa od masy trzeciego, to ciężarki te przemieszczą się, lecz nie spadną. Pomiędzy linką, a kierunkiem pionowym w punkcie zawieszenia ciężarka pomiędzy bloczkami ustalą się takie kąty, aby po dodaniu wszystkich wektorów ich suma wynosiła zero, a zatem spełniona była zasada dynamiki Newtona zasada dynamiki Newtona.
Aby lepiej zrozumieć tę sytuację zajrzyj do trzeciej części programu.
Rozkład sił na równi pochyłej
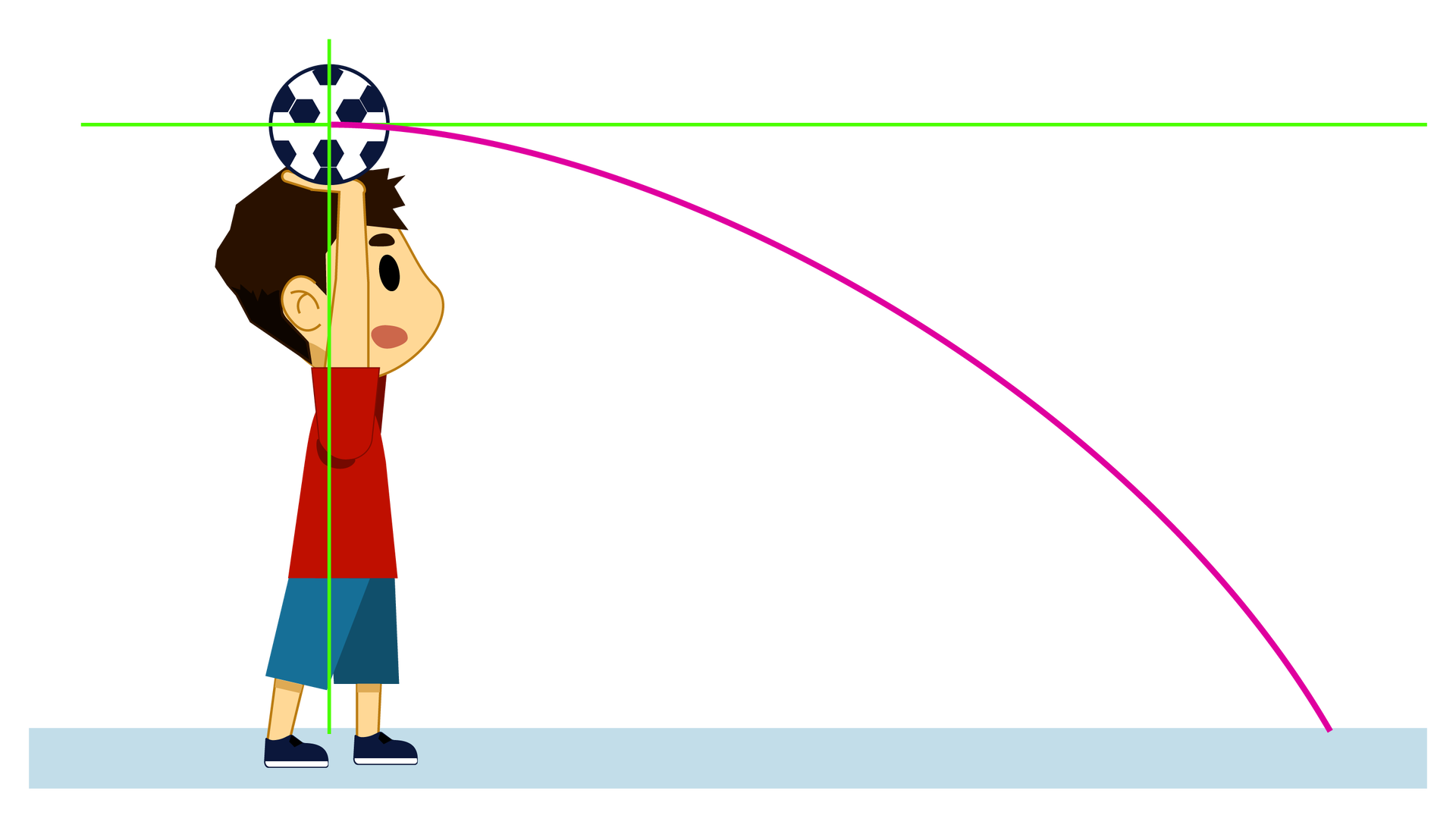
Jedną z sytuacji, w których wykorzystuje się rozkład wektorów na składowe jest rozwiązywanie zadań związanych z dynamiką ciała znajdującego się na równi pochyłej. Rozwiązując dowolny problem ruchu ciała w więcej niż jednym wymiarze konieczne jest rozłożenie wszystkich sił działających na ciało (a także innych wielkości wektorowych, które mają wpływ na ruch, jak np. prędkość) na prostopadłe do siebie kierunki, w ten sposób możemy osobno opisywać ruch względem każdego z tych kierunków. Wybór kierunków, względem których będziemy opisywać ruch jest dowolny, jednak zazwyczaj wybieramy taką orientację jednego z kierunków, aby opis ruchu był jak najprostszy. W przypadku opisu ruchu rzuconej znad głowy piłki przed siebie wszystkie wektory będziemy rozkładać względem kierunków: równoległego do ziemi i prostopadłego do niego.
W przypadku równi pochyłej rozkładu sił możemy dokonać równolegle do podłoża (i prostopadle do niego) - w kierunku zgodnym z kierunkiem wektora siły ciężkości lub równolegle do powierzchni równi i prostopadle do niej - w kierunku zgodnym z kierunkiem wektora siły reakcji podłoża. Zazwyczaj wybieramy drugi sposób rozkładu wektorów, ze względu na dużo prostszy opis matematyczny ruchu w takim układzie.
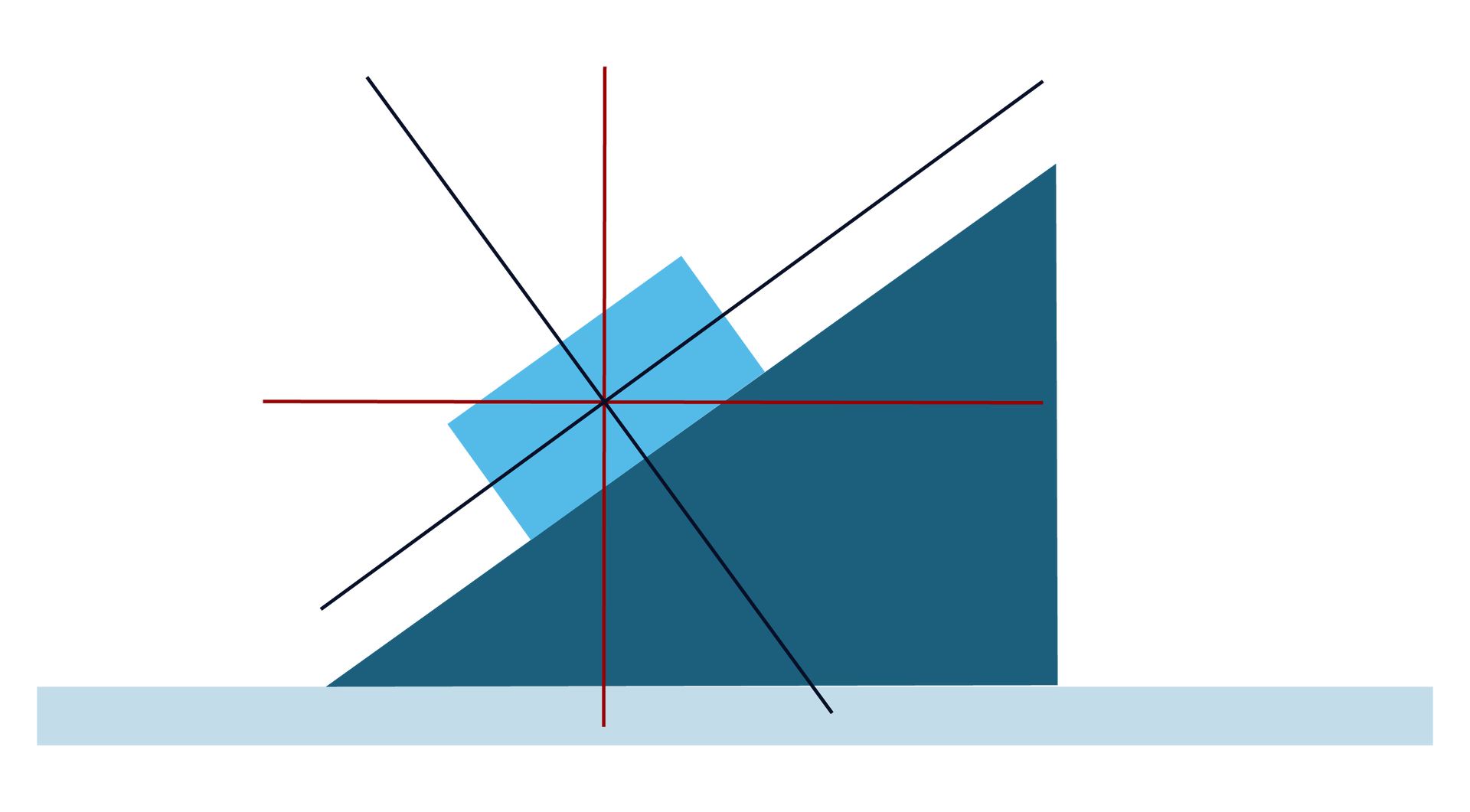
W przypadku rysowania sił działających na ciało na równi pochyłej ważne jest, aby w prawidłowych miejsach przykładać działające siły, gdyż ta informacja będzie kluczowa w momencie, w którym omawiać będziesz dynamikę bryły sztywnej. Pamiętaj, że siła tarcia przyłożona jest w środku odcinka stycznego pomiędzy ciałem, a równią. Zwróć także uwagę, że siła nacisku przyłożona jest do równi, a nie ciała! Do ciała przyłożona jest siła reakcji podłoża działająca w związku z zasadą dynamiki Newtona, dlatego ma ona taki sam kierunek i wartość jak siła nacisku. W programie oraz tym materiale ciało umieszczone na równi jest punktem materialnym, zatem wszystkie siły, których punkty przyłożenia znajdują się na ciele (zazwyczaj rysowanym jako kwadrat), są przyłożone w jednym punkcie, stąd możemy je sumować.
W programie poszczególne siły oznaczone są jako:
- siła ciężkości,
- siła nacisku,
- siła reakcji podłoża,
- siła tarcia,
- siła prostopadła do powierzchni równi,
- siła równoległa do powierzchni równi,
- siła wypadkowa.
Pamiętaj, że równoważące się siły zgodnie z zasadą dynamiki powodują, że ciało porusza się ruchem jednostajnym prostoliniowym (jeśli się wcześniej poruszało) albo spoczywa. Pierwszą z opisanych sytuacji możesz zaobserwować w programie.
Program ucząco‑monitorujący do nauki zapisu wektorów
Uruchom program klikając przycisk Rozpocznij
. Program możesz też otworzyć w widoku pełnoekranowym klikając przycisk w prawym dolnym rogu. Wybierz jeden z trzech programów:
Dodawanie wektorów.
Równowaga trzech sił.
Rozkładanie wektorów na składowe,
Rozkład sił na równi pochyłej.
W każdym z programów w prawym górnym rogu znajdziesz przyciski służące kolejno do: wgrania pliku tekstowego ze zdefiniowanymi parametrami programu, pobrania aktualnego stanu programu oraz powrotu do wyboru programu.

W prawym dolnym rogu znajdziesz przyciski odpowiadające za oddalanie kamery, przybliżanie kamery i resetowanie widoku do domyślnego.

Dodawanie wektorów
W tym programie najpierw wybierz liczbę wektorów, klikając strzałki w prawo lub w lewo znajdujące się przy polu Liczba wektorów
. Aby zmienić kierunek, zwrot i długość wektora naciśnij i przytrzymaj jego koniec, przesuwając go w wybrane miejsce. Możesz w ten sam sposób przesunąć także czerwony punkt, który jest punktem przyłożenia wszystkich wektorów. Gdy ustawisz wybrane parametry, naciśnij przycisk Rozpocznij
i obserwuj animację. Z listy po prawej stronie ekranu możesz odczytać współrzędne wektorów , które są dodawane oraz wektora będącego sumą tych wektorów. Aby cofnąć do momentu definiowania wektorów, kliknij przycisk Restartuj
.
Równowaga trzech sił
Wybierz wartość wszystkich mas, klikając strzałki w lewo lub w prawo w poszczególnych polach. Program sprawdza warunki, jakie muszą spełniać masy, dlatego możesz nie być w stanie zmniejszyć lub zwiększyć wartości danych mas. Po kliknięciu w pole Suma sił
wyświetli się graficzne zsumowanie wektorów oraz . Poniżej wyświetlają się wartości kątów oraz . Aby powrócić do początkowych ustawień masy, kliknij przycisk Restartuj
.
Rozkładanie wektorów na składowe
Wybierz ułożenie punktu przyłożenia, klikając i przytrzymując przemieść w nowe miejsce czerwony punkt. Aby wybrać kierunki prostych, kliknij i przytrzymaj zaznaczony na nich punkt w kolorze prostej i przemieść w nowe miejsce. Aby zmienić długość i kierunek wektora , analogicznie kliknij i przemieść koniec wektora w wybrane miejsce. Klikając przycisk Rozpocznij
włączysz animację. Naciskając przycisk Restartuj
powrócisz do początkowych ustawień programu. Po prawej stronie w górnej tabeli podane są współrzędne poszczególnych wektorów, a w dolnej ich długości.
Rozkład sił na równi pochyłej
W menu z prawej strony możesz wybrać masę ciała znajdującego się na równi, wartość współczynnika tarcia oraz możesz zobaczyć wartości poszczególnych sił. Kąt nachylenia równi możesz ustalić przesuwając niebieski punkt na górze równi lub skorzystać z menu po prawej stronie, z pomocą którego wybierzesz charakterystyczne wartości od do co . Możesz także pokazać lub ukryć linie pomocnicze pochodzące z rozkładania wektora na składowe oraz wektory powstałe w wyniku tej operacji, zaznaczając odpowiednie pole wyboru. Za pomocą pomarańczowego punktu możesz przesuwać kamerę. Naciśnij przycisk Rozpocznij
, aby pojawiła się dodatkowa siła zewnętrzna , która zapewni aby klocek poruszał się ruchem jednostajnym i zobaczyć ten ruch. Aby klocek wrócił na piewotne miejsce naciśnij przycisk Restartuj
, który pojawi się obok niego.
- Dodawanie wektorów.
- Rozkład wektorów na składowe.
- Równowaga trzech sił.
- Rozkład sił na równi pochyłej.
Zasób interaktywny dostępny pod adresem https://zpe.gov.pl/b/PLiOTq6ue
Interaktywny program ucząco‑monitorujący do nauki zapisu wektorów składa się z czterech części:
Dodawanie wektorów.
Rozkład wektorów na składowe.
Równowaga trzech sił.
Rozkład sił na równi pochyłej.
W dalszej części zapoznasz się z algebraicznym podejściem do wektorów ich dodawania oraz rozkładu na składowe.
Informacje ogólne
Z pojęciem wektora możesz spotkać się także w matematyce. W matematyce spotkasz się z tym, że wartość (długość) będzie częściej nazywana modułem. W matematyce też bardzo często omawia się wektory swobodne, które tym różnią się od wektorów omawianych na fizyce, że nie mają punktu przyłożenia. W dalszej części zapoznasz się z algebraicznym podejściem do dodawania wektorów oraz rozkładu wektorów na składowe na płaszczyźnie. Wektor na płaszczyźnie posiada dwie współrzędne. W przypadku zaczepienia go w początku układu współrzędnych współrzędne wektora określają wtedy punkt, w którym będzie się kończył wektor. Np. wektor o współrzędnych ma początek w punkcie , a koniec w punkcie . W przypadku gdy wektor rozpięty jest pomiędzy dwoma punktami jego współrzędne ustalamy poprzez odjęcie od odpowiednich współrzędnych punktu końcowego tych punktu początkowego (punktu przyłożenia). Np. gdy koniec wektora jest w punkcie o współrzędnych , a początek wektora , to współrzędne wektora będą wynosiły oraz , zatem wektor ten będzie miał współrzędne .
Dodawanie wektorów
Algebraiczne dodawanie wektorów polega na dodaniu do siebie odpowiednich współrzędnych każdego z wektorów. Np. oraz , wtedy . Dodawanie wektorów jest przemienne.
Rozkładanie wektora na składowe
Podczas rozkładu wektorów na składowe dane są równania dwóch prostych: oraz wektora . Trzeba wyznaczyć nowe proste będące przesuniętymi prostymi w stosunku do pierwotnych o wektor, w takiej sytuacji dla prostej wyznaczamy wyraz wolny z pomocą równania: , zatem równanie przesuniętej prostej to . Analogiczne postępowanie powtarzamy w przypadku drugiej prostej. Następnie znajdujemy punkt wspólny dla par prostych nierównoległych (przesuniętej i nieprzesuniętej) w obydwu kombinacjach. Postępowanie dla pierwszej pary: przyrównujemy równania odpowiednich prostych i z wyznaczamy (odciętą punktu wspólnego), następnie podstawiamy do równania jednej z przyrównanych wcześniej prostych wyznaczając rzędną punktu wspólnego (). W ten sposób otrzymamy współrzędne punktu, które będą jednocześnie współrzędnymi jednego z wektorów składowych. Analogiczne postępowanie powtarzamy dla drugiej pary prostych otrzymując drugi wektor składowy. Jeśli wszystkie operacje wykonaliśmy poprawnie to suma otrzymanych wektorów jest rozkładanym wektorem.
Polecenia
Kiedy długość wektora, będącego sumą dwóch wektorów jest sumą długości dodawanych wektorów?
Dodaj cztery wektory graficznie metodą równoległoboku i metodą trójkąta. Która z tych metod jest w tym wypadku szybsza?
Przez dwa bloczki przewieszono cienką i nieważką linkę. Na jednym końcu powieszono ciężarek o ciężarze , na drugim , a na środku pomiędzy bloczkami zawieszono ciężarek o masie . Czy siły te zrównoważą się i układ pozostanie w spoczynku?
Dokonując rozkładu sił na równi pochyłej, jakie kryterium muszą spełniać kierunki, względem których rozkładamy działające siły? Jak, dla wygody, wybieramy jeden z kierunków?
Zestaw ćwiczeń interaktywnych
Słownik
to zasada fizyczna mówiąca, że jeśli na ciało nie działają żadne siły lub działające siły równoważą się, to ciało pozostaje w spoczynku lub porusza się ruchem jednostajnym prostoliniowym
jest to wektorowa wielkość fizyczna, opisująca zmianę położenia ciała w czasie. Długość tego wektora nazywana jest szybkością
wektor o tej samej długości, tym samym kierunku oraz takim samym punkcie przyłożenia, ale przeciwnym zwrocie niż wektor pierwotny
jest to wektorowa wielkość fizyczna, opisująca oddziaływania fizyczne między ciałami
Bibliografia
Sagnowska B., Szot‑Gawlik D., Godlewska M., Rozenbajgier M., Rozenbajgier R., 2017, Świat fizyki, Warszawa, WSiP.