Montaż mechaniczny urządzeń automatyki przemysłowej
ELM.01. Montaż, uruchamianie i obsługiwanie układów automatyki przemysłowej – Automatyk 731107 i Technik automatyk 311909
Montaż i serwis systemów automatyki przemysłowej
PROGRAM ĆWICZENIOWY DO PROJEKTOWANIA PRZEZ DOBIERANIE
Zasób interaktywny dostępny pod adresem https://zpe.gov.pl/a/D194grppB
Baza wiedzy
Grafika przedstawia robota przemysłowego. Jego elementy są opisane. Korpus umiejscowiony jest na solidnej podstawie. Do korpusu przymocowane jest ramię. Powyżej podstawy oraz przy miejscu osadzenia ramienia znajdują się zespoły napięciowe o kształcie walców. Na końcu ramienia znajdują się kiści, a między nimi interfejs mechaniczny. Obok robota znajdują się cztery prostopadłościany. Najmniejszy przytwierdzony do ściany to panel sterowania. Obok znajduje się bryła - układ sterujący z przyciskami opisanymi jako sterownik, a powyżej znajduje się ekran. Obok widoczna jest bryła z czerwonym przyciskiem. Jest to układ napędu.
Kolejność czynności, które musi wykonać automatyk podczas montażu pierścieni zacinających:
1. Przecięcie rury pod kątem prostym (zgodnie z PN‑EN dopuszczalne odchylenie od kąta prostego to 0,5°).
2. Usunięcie wewnętrznych i zewnętrznych zadziorów (wystających elementów po piłowaniu).
3. W zależności od typu oraz materiału wykonania rur (cienkościenne, aluminiowe, miedziane) zastosowanie tulejki wzmacniającej.
4. Zachować minimalne długości prostego odcinka rury zgodnie z zaleceniami.
Ćwiczenia
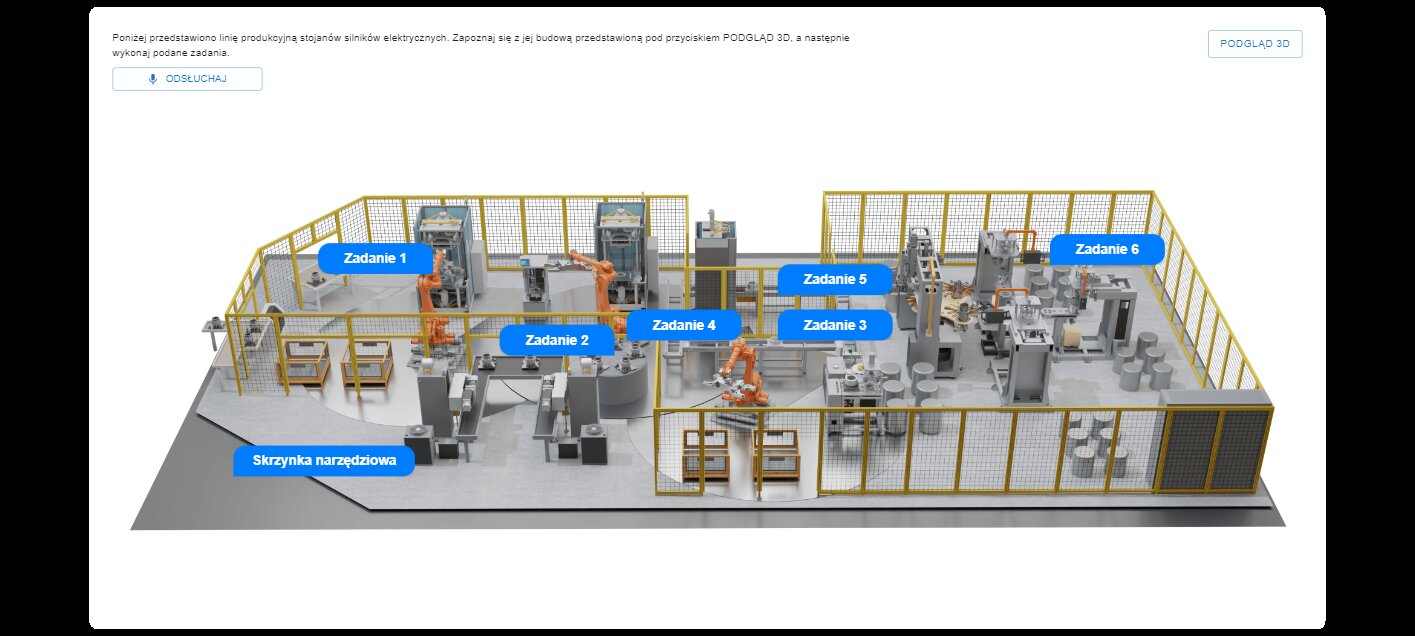
Gdzie należy szukać informacji dotyczących możliwej awarii linii produkcyjnej stojanów silników elektrycznych?
Jaki typ przenośnika jest wykorzystany w linii produkcyjnej stojanów?
Ile portów osiowych w robocie przemysłowym wymaga smarowania?