Zaczniemy od najprostszego sposobu podłączenia większych obciążeń do płytki Arduino Uno. Posłużymy się tranzystorem.
Ważne!
Tranzystor to element sterujący przepływem prądu lub wzmacniający go. Możemy myśleć o nim jako o elektronicznym przełączniku, który w bezpieczny sposób (to jest małym prądem) może włączyć przepływ większego prądu.
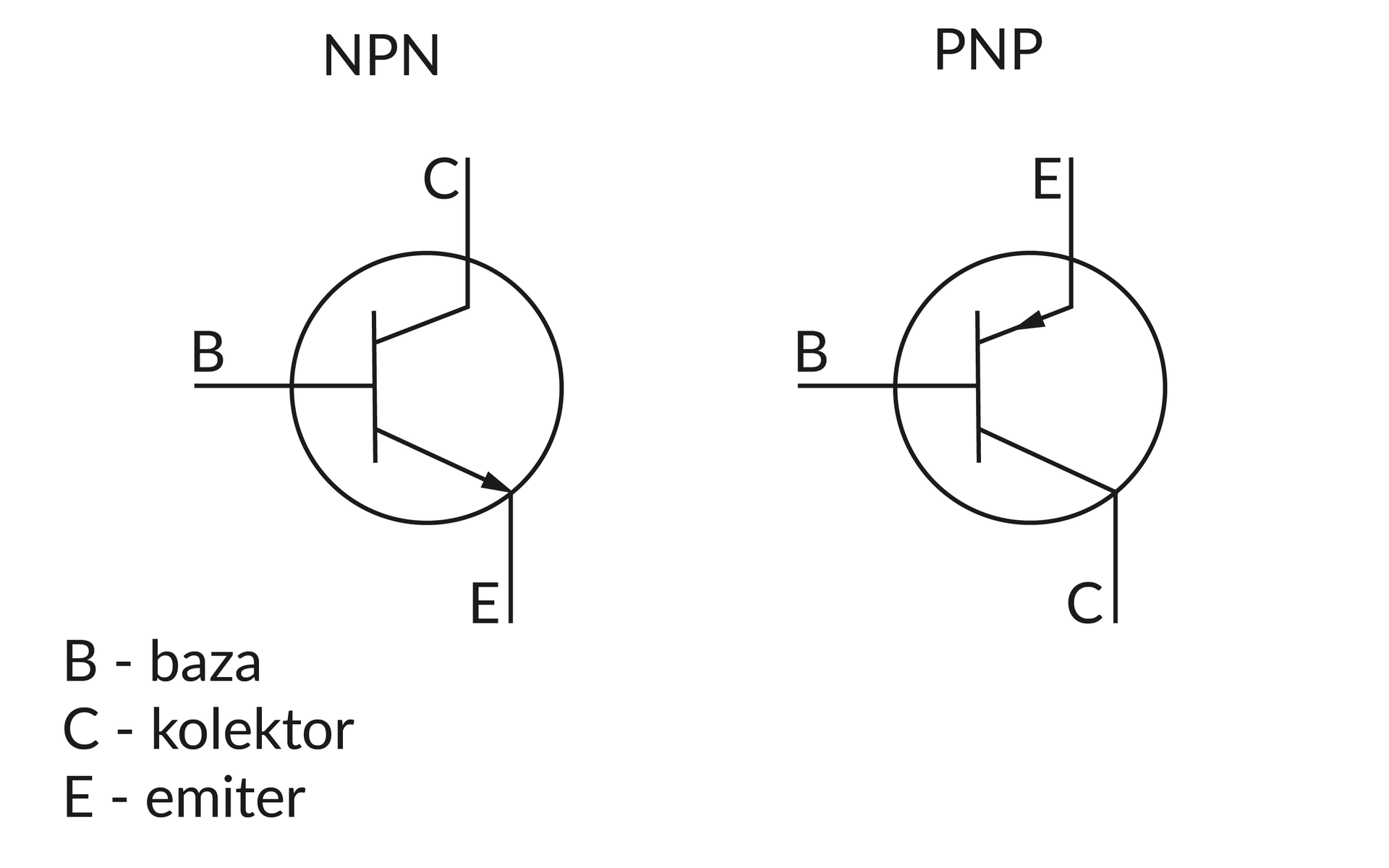
Tranzystory ze względu na budowę dzieli się na bipolarne i polowe (unipolarne). Tranzystory bipolarne również dzielimy na dwie grupy: NPN i PNP. Różnica między nimi polega na układzie wykorzystywanego materiału półprzewodnikowego, a także na tym, w jaki sposób polaryzuje się poszczególne wyprowadzenia oraz jak prąd przepływa przez tranzystor. Zastosujemy jeden z popularniejszych tranzystorów bipolarnych typu NPN – 2N2222.
RBmp3j5zOumhm
Ilustracja przedstawia 2 grafiki używane do reprezentacji tranzystora BJT. Po lewo konfiguracja NPN, po prawo PNP, różnią się zamienioną kolejnością pinów C i E oraz kierunkiem i miejscem położenia strzałki. W kole narysowana jest pionowa kreska, do której pod kątem prostym dochodzi pin B - baza. Od pionowej kreski odchodzą dwie, w małej odległości od siebie, ukośne kreski skierowane na zewnątrz. W konfiguracji NPN górna kreska to pin C - kolektor, natomiast dolna to E - emiter, w konfiguracji PNP jest na odwrót. Ostatnim istotym elementem jest strzałka, która zawsze znajduje się obok emitera, w NPN kieruje na zewnątrz "od bazy", w PNP kieruje do wewnątrz "do bazy".
Podział tranzystorów bipolarnych
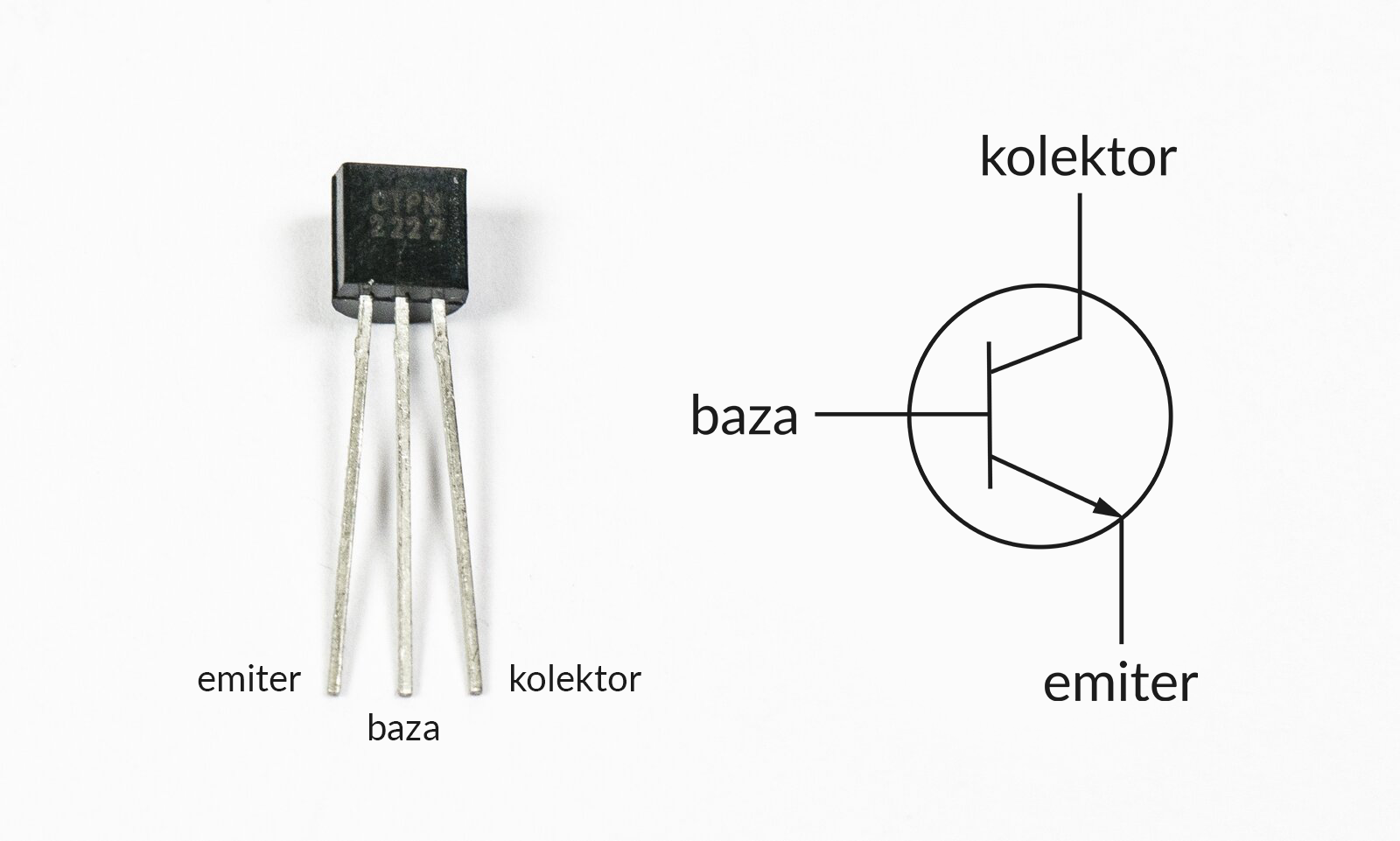
Obudowa tranzystora 2N2222 podobna jest do obudowy czujnika temperatury: jest to obudowa typu TO‑92. Gdy patrzymy na płaską stronę tranzystora, a jego wyprowadzenia są skierowane w dół, lewa nóżka to emiter, środkowa jest bazą, a prawa to kolektor. W przypadku tranzystorów bipolarnych za pomocą niewielkiego prądu płynącego pomiędzy bazą a emiterem sterujemy większym prądem płynącym pomiędzy kolektorem a emiterem.
Ważne!
Jeżeli masz inny tranzystor, sprawdź w nocie katalogowej, które wyprowadzenia to baza, emiter i kolektor, gdyż mogą być one rozmieszczone inaczej niż w tranzystorze 2N2222.
R1Gd00qPdjfKC
Zdjęcie przedstawia zarówno fizyczny jak i graficzny tranzystor BJT. Fizyczny tranzystor posiada 3 nóżki: emiter, baza i kolektor. Graficzna reprezentacja to BJT w konfiguracji NPN, gdzie w okręgu narysowano pionową kreskę, do której dochodzi prostopadle do niej pin bazy, od pionowej kreski odchodzą pod lekkim kątem piny kolektora (na górze) oraz emitera (na dole). Od bazy do emitera kieruje strzałka wewnątrz okręgu.
Źródło: Contentplus.pl Sp. z o.o., licencja: CC BY-SA 3.0.
Zanim przejdziemy do sterowania silnikiem, zajmijmy się nieco łatwiejszym zadaniem. Po raz kolejny użyjemy diod LED.
Dotychczas wszystkie diody podłączaliśmy do osobnych pinów, więc zasilanie nie sprawiało kłopotu. Jeżeli jednak podłączymy kilka diod do jednego pinu, to płytka Arduino Uno może sobie nie poradzić z zasilaniem. Dlaczego tak się dzieje?
Jeden pin na płytce Arduino Uno może być obciążony maksymalnie prądem o natężeniu 40 miliamperów. Załóżmy, że podłączamy do pinu jedną czerwoną diodę (1,2 V) i jeden rezystor (220 Ωomega). Obciążenie prądowe to różnica między napięciem, jakie uzyskujemy na płytce Arduino (5 V), a napięciem diody podzielonym przez rezystancję: (5 V – 1,2 V) : 220 Ωomega = 17,27 mA.
Jeżeli podepniemy do jednego pinu dwie czerwone diody, to płytka będzie musiała wygenerować na nim prąd o natężeniu 34,54 mA. Przy trzech diodach będzie to już 51,81 mA, czyli za dużo jak na możliwości Arduino Uno. Sięgniemy więc po tranzystor. Podłączmy pięć diod, które będziemy zasilać wprost z pinu 5 V. Tranzystor posłuży do sterowania diodami LED.
Narysujmy schemat odpowiedniego układu:
R12Yzi34HQuLL
Schemat elektryczny przedstawia połączenie płytki arduino uno do tranzystora BJT w konfiguracji NPN oraz szeregu LED oraz rezystorów. Od pinu 5V połączone są równolegle zestawy 5 LED, do każdej z tyłu podłączony jest rezystor 220 om. Katody tych LED podłączone są do wspólnego węzła, który następnie podłączony jest do pinu kolektora BJT. Baza BJT podłączona jest do pinu 6 poprzez rezystor 220 om, natomiast emiter do pinu GND.
Elementy potrzebne do wykonania zadania:
płytka Arduino Uno,
płytka stykowa,
Kabel USB typu A‑B,
5 czerwonych diod LED,
6 rezystorów 220 Ωomega,
tranzystor,
przewody i zworki połączeniowe.
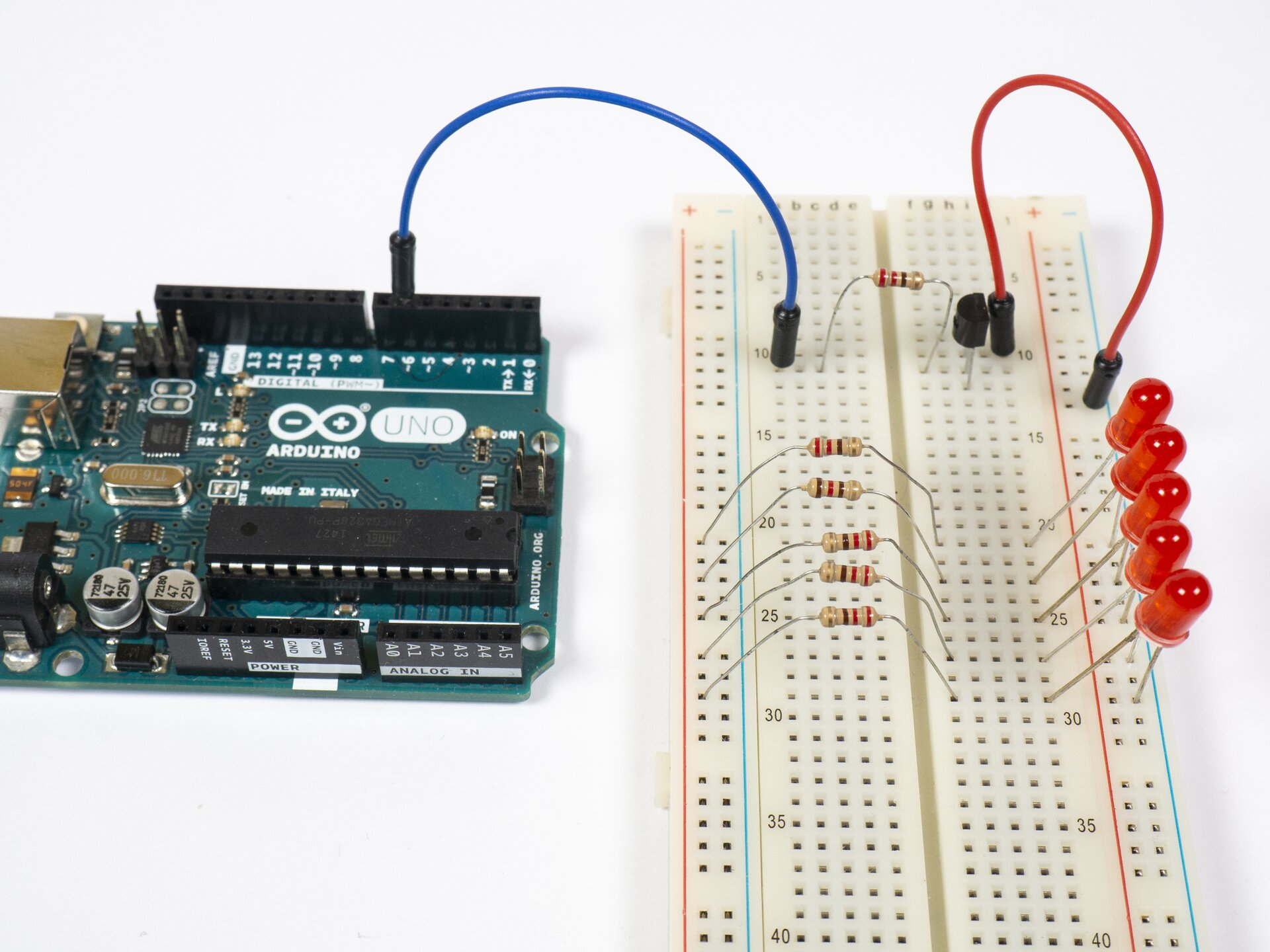
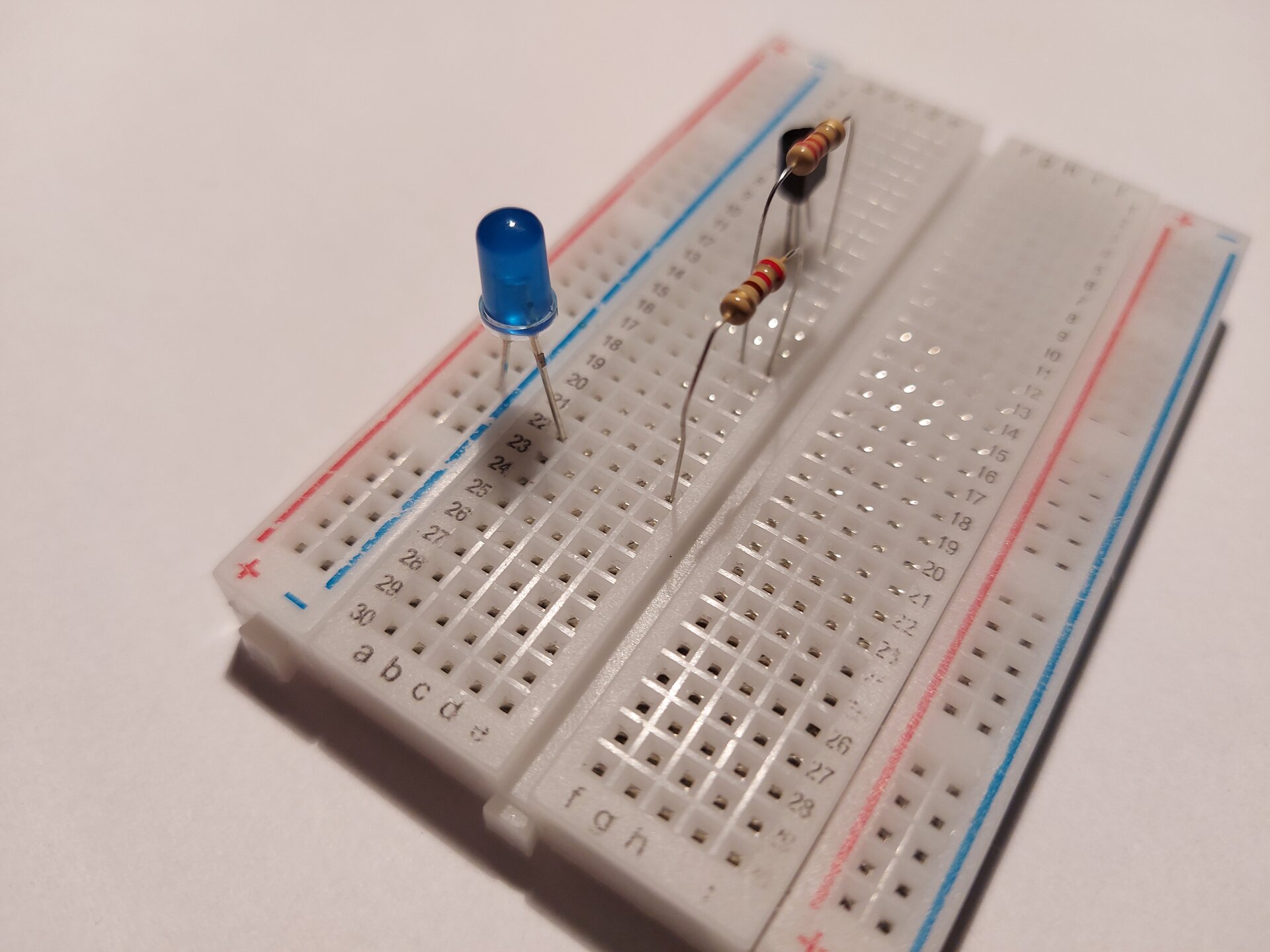
1. Podłączamy diody do płytki stykowej – anody wpinamy w szynę danych, katody w szynę ujemną. Anody łączymy rezystorami z szyną dodatnią.
R1OZmVcpsyu7Z
Zdjęcie przedstawia płytkę stykową z 5 rezystorami podłączonymi szeregowo do 5 czerwonych LED. Katody LED połączone są do uziemienia płytki, natomiast anody rezystorów do przeciwległego węzła +.
Źródło: Contentplus.pl Sp. z o.o., licencja: CC BY-SA 3.0.
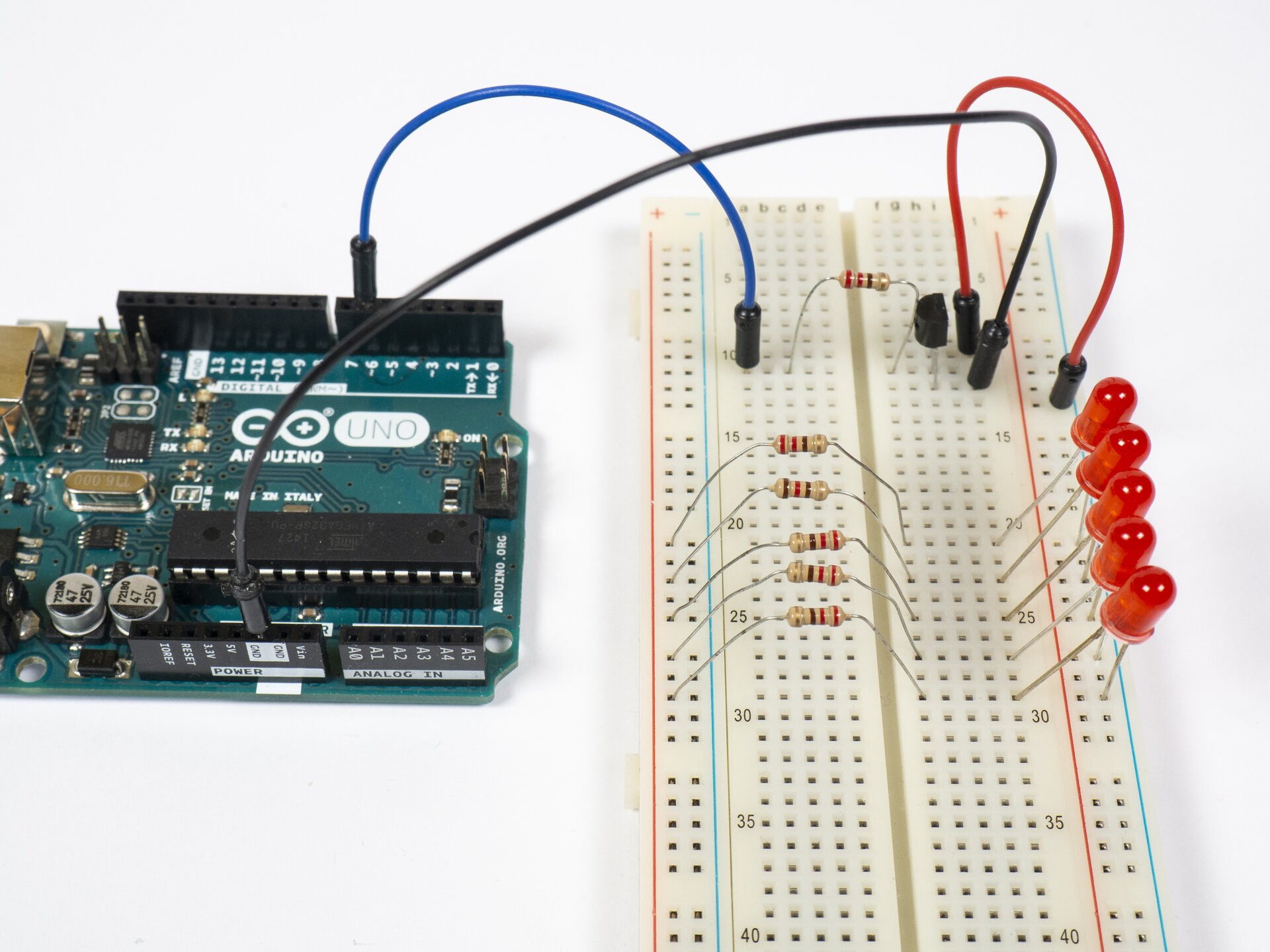
2. Wpinamy tranzystor – ustawiamy nóżki wzdłuż płytki. Bazę (środkową nóżkę) podłączamy do pinu numer 6 (możesz wybrać inny pin). Pamiętaj, że między pinem a bazą ma się znaleźć rezystor.
R1OM1dI33fSVj
Zdjęcie przedstawia płytkę stykową z 5 rezystorami podłączonymi szeregowo do 5 czerwonych LED. Katody LED połączone są do uziemienia płytki, natomiast anody rezystorów do przeciwległego węzła +. Po lewej stronie położono arduino uno, które jest podłączone do płytki 1 kablem do pinu 6, następnie na płytce poprzez rezystor do bazy BJT.
Źródło: Contentplus.pl Sp. z o.o., licencja: CC BY-SA 3.0.
3. Łączymy kolektor z szyną płytki stykowej – oczywiście tą samą, do której podpięte są katody diod.
R1JJ7ErfurJLK
Zdjęcie przedstawia płytkę stykową z 5 rezystorami podłączonymi szeregowo do 5 czerwonych LED. Katody LED połączone są do uziemienia płytki, natomiast anody rezystorów do przeciwległego węzła +. Po lewej stronie położono arduino uno, które jest podłączone do płytki 1 kablem do pinu 6, następnie na płytce poprzez rezystor do bazy BJT. Z kolektora BJT po uziemienia płytki stykowej podłączony jest kabel.
Źródło: Contentplus.pl Sp. z o.o., licencja: CC BY-SA 3.0.
4. Podłączamy masę (GND) do emitera.
R1S5mXGCkjjin
Zdjęcie przedstawia płytkę stykową z 5 rezystorami podłączonymi szeregowo do 5 czerwonych LED. Katody LED połączone są do uziemienia płytki, natomiast anody rezystorów do przeciwległego węzła +. Po lewej stronie położono arduino uno, które jest podłączone do płytki 1 kablem do pinu 6, następnie na płytce poprzez rezystor do bazy BJT. Z kolektora BJT po uziemienia płytki stykowej podłączony jest kabel, natomiast od emitera do GND arduino podłączono kolejny.
Źródło: Contentplus.pl Sp. z o.o., licencja: CC BY-SA 3.0.
5. Podłączamy zasilanie (5 V) do dodatniej szyny płytki stykowej, w której znajdują się rezystory.
RdUdWPJCbsJhB
Zdjęcie przedstawia płytkę stykową z 5 rezystorami podłączonymi szeregowo do 5 czerwonych LED. Katody LED połączone są do uziemienia płytki, natomiast anody rezystorów do przeciwległego węzła +. Po lewej stronie położono arduino uno, które jest podłączone do płytki 1 kablem do pinu 6, następnie na płytce poprzez rezystor do bazy BJT. Z kolektora BJT po uziemienia płytki stykowej podłączony jest kabel, natomiast od emitera do GND arduino podłączono kolejny. Od pinu arduino 5V do płytki stykowej podłączony jest kabel do węzła +, do którego podłączone są rezystory.
Źródło: Contentplus.pl Sp. z o.o., licencja: CC BY-SA 3.0.
Płytkę Arduino Uno podłączamy do komputera. Uruchamiamy Arduino IDE i zapisujemy nowy szkic. Teraz sprawimy, że diody będą migać co pół sekundy.
Linia 1. int ledPin znak równości 6 średnik.
Linia 3. void setup otwórz nawias okrągły zamknij nawias okrągły otwórz nawias klamrowy.
Linia 4. pinMode otwórz nawias okrągły ledPin przecinek OUTPUT zamknij nawias okrągły średnik.
Linia 5. zamknij nawias klamrowy.
Linia 7. void loop otwórz nawias okrągły zamknij nawias okrągły otwórz nawias klamrowy.
Linia 8. digitalWrite otwórz nawias okrągły ledPin przecinek HIGH zamknij nawias okrągły średnik.
Linia 9. delay otwórz nawias okrągły 500 zamknij nawias okrągły średnik.
Linia 10. digitalWrite otwórz nawias okrągły ledPin przecinek LOW zamknij nawias okrągły średnik.
Linia 11. delay otwórz nawias okrągły 500 zamknij nawias okrągły średnik.
Linia 12. zamknij nawias klamrowy.
Źródło: Contentplus.pl Sp. z o.o., licencja: CC BY-SA 3.0.
Film nawiązujący do treści materiału. Podłączone do płytki czerwone diody migają z częstotliwością co pół sekundy.
Podłączenie silnika prądu stałego
Zastąpimy teraz diody silnikiem DCsilnik DCsilnikiem DC. Jak wiadomo, silnik wymaga odpowiedniego zasilania. W związku z tym, że każdy silnik pracuje przy określonym napięciu, zastosujemy zewnętrzne źródło zasilania.
Teoretycznie nasz silnik można zasilać wprost z płytki Arduino. Jednak ze względu na bezpieczeństwo elementów na płytce i możliwość użycia więcej niż jednego silnika (na przykład w przypadku pojazdów zazwyczaj stosuje się co najmniej dwa silniki), które również mogą wymagać większego napięcia, bardziej sensowne wydaje się wykorzystanie zewnętrznego źródła zasilania.
Zanim jednak przejdziemy do budowy układu, musimy poznać jeszcze jeden element elektroniczny. Jest nim dioda prostownicza.
R1dgkb9DWcksH
Zdjęcie przedstawia diodę, nie jest to świecąca dioda - LED, ale zwykła nie świecąca wersja. Ma 2 metalowe nóżki, a sam komponent to walec z srebnym paskiem po jednej stronie.
Źródło: Contentplus.pl Sp. z o.o., licencja: CC BY-SA 3.0.
W przeciwieństwie do diody LED nie emituje ona światła, lecz prostuje prąd. Co to znaczy? Załóżmy, że chcemy włączyć silnik, a następnie go wyłączyć. Jeszcze przez chwilę po wyłączeniu silnika wirnik będzie się kręcić. Działa on wówczas jak prądnica, czyli zmienia energię mechaniczną w energię elektryczną. Prąd błądzący, czyli właśnie ten, który może powstać po wyłączeniu silnika, jest w stanie uszkodzić płytkę Arduino. Dlatego musimy go zablokować. W diodzie prostowniczej prąd przepływa tylko w jednym kierunku – od anody do katody.
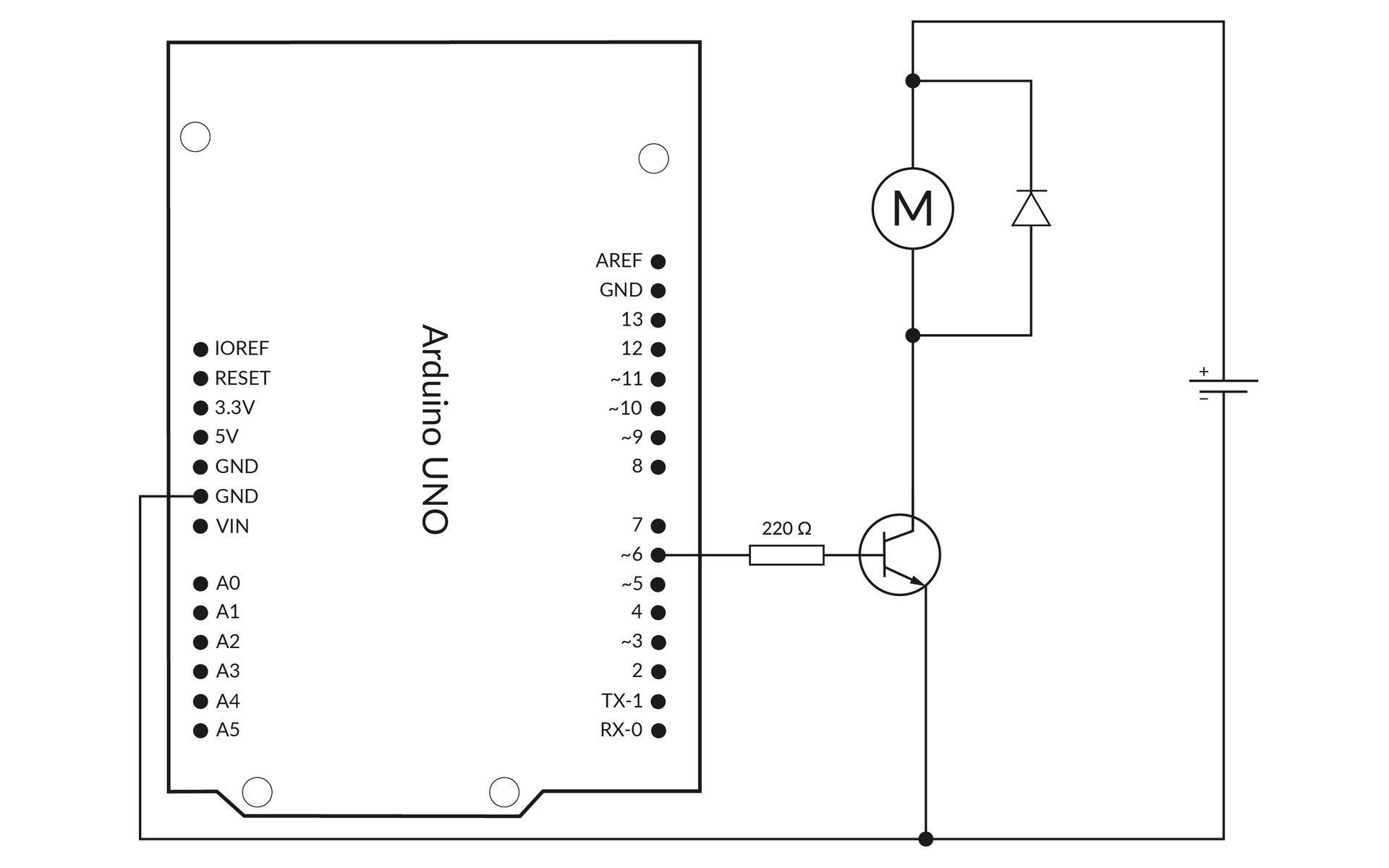
Niżej pokazujemy schemat podłączenia silnika wraz z zewnętrznym źródłem zasilania. Należy pamiętać, że strzałka w symbolu diody prostowniczej ściśle określa kierunek prądu, natomiast kreska oznacza, że prąd nie może przez tę diodę wrócić. Silnik, którym dysponujemy, wymaga zasilania napięciem 3 V. Sprawdź swój silnik – być może wymaga innego napięcia.
R1c0hHUp5hxj8
Ilustracja przedstawia schemat elektryczny połączenia arduino uno do silniczka i źródła prądu. Od pinu 6 poprzez rezystor 220 om podłączona jest baza BJT. Emiter bazy podłączony jest do pinu GND, natomiast kolektor podłączony jest do silniczka oznaczonego jako okrąg z literą 'M' w środku. Obok silniczka oznaczona jest dioda, która podłączona jest do niego równolegle, katodą "do góry". Do Anody silnika podłączone jest źródło prądu, którego ujemny terminal podłączony jest do uziemienia arduino - pin GND.
Elementy potrzebne do budowy układu
płytka Arduino Uno,
płytka stykowa,
kabel USB typu A‑B,
tranzystor,
dioda prostownicza,
rezystor 220 Ωomega,
silnik DC,
2 baterie 1,5 V,
koszyk na baterie,
przewody i zworki połączeniowe.
1. Podłączamy tranzystor do pinu numer 6 – wpinamy tranzystor tak, aby każda nóżka znalazła się w innym wierszu. Bazę (środkową nóżkę) łączymy rezystorem i przewodem z pinem płytki Arduino.
ROrzCetgDf7a7
Zdjęcie przedstawia arduino uno podłączone kablem z pinu 6 do płytki stykowej, kabel łączy się z rezystorem, a następnie szeregowo do BJT.
Źródło: Contentplus.pl Sp. z o.o., licencja: CC BY-SA 3.0.
2. Kolektor łączymy z jednym z przewodów silnika oraz diodą prostowniczą – anoda ma być wpięta w szynę danych, a katoda do szyny dodatniej.
R1PAzG6uZDDWS
Zdjęcie przedstawia arduino uno podłączone kablem z pinu 6 do płytki stykowej, kabel łączy się z rezystorem, a następnie szeregowo do BJT. Do kolektora BJT podłączono czerwony kabel silnika jak i diodę - stroną bez kreski. Katodę (stronę z kreską) diody podłączono do węzła plus płytki stykowej.
Źródło: Contentplus.pl Sp. z o.o., licencja: CC BY-SA 3.0.
3. Podłączamy zasilanie – drugi, wolny przewód silnika łączymy z szyną dodatnią płytki stykowej. Do tej samej szyny podłączamy przewód zasilający biegnący z koszyka baterii 2 × 1,5 V, a drugi przewód baterii wpinamy do szyny masy.
RaTgtHZWZAVxt
Zdjęcie przedstawia arduino uno podłączone kablem z pinu 6 do płytki stykowej, kabel łączy się z rezystorem, a następnie szeregowo do BJT. Do kolektora BJT podłączono czerwony kabel silnika jak i diodę - stroną bez kreski. Katodę (stronę z kreską) diody podłączono do węzła plus płytki stykowej. Do węzła plus płytki podłączono zarówno czarny kabel silnika jak i czerwony kabel wychodzący z zestawu bateri, czarny kabel tego zestawu podłączono do uziemienia płytki.
Źródło: Contentplus.pl Sp. z o.o., licencja: CC BY-SA 3.0.
4. Na koniec podpinamy masę. Emiter tranzystora łączymy z szyną masy płytki stykowej, a następnie łączymy szynę z pinem masy płytki Arduino (GND).
RO7KfE6siDrTh
Zdjęcie przedstawia arduino uno podłączone kablem z pinu 6 do płytki stykowej, kabel łączy się z rezystorem, a następnie szeregowo do BJT. Do kolektora BJT podłączono czerwony kabel silnika jak i diodę - stroną bez kreski. Katodę (stronę z kreską) diody podłączono do węzła plus płytki stykowej. Do węzła plus płytki podłączono zarówno czarny kabel silnika jak i czerwony kabel wychodzący z zestawu bateri, czarny kabel tego zestawu podłączono do uziemienia płytki. Uziemienie płytki stykowej połączono kablem do uziemienia arduino.
Źródło: Contentplus.pl Sp. z o.o., licencja: CC BY-SA 3.0.
Podłączamy płytkę Arduino do komputera. Jeżeli w pamięci mikrokontrolera pozostawiliśmy poprzedni program, silnik będzie się włączał co pół sekundy. Zmodyfikujmy szkic tak, żeby silnik włączał się na dwie sekundy, a później wyłączał na pięć sekund.
Linia 1. int silnik znak równości 6 średnik.
Linia 3. void setup otwórz nawias okrągły zamknij nawias okrągły otwórz nawias klamrowy.
Linia 4. pinMode otwórz nawias okrągły silnik przecinek OUTPUT zamknij nawias okrągły średnik.
Linia 5. zamknij nawias klamrowy.
Linia 7. void loop otwórz nawias okrągły zamknij nawias okrągły otwórz nawias klamrowy.
Linia 8. digitalWrite otwórz nawias okrągły silnik przecinek HIGH zamknij nawias okrągły średnik.
Linia 9. delay otwórz nawias okrągły 2000 zamknij nawias okrągły średnik.
Linia 10. digitalWrite otwórz nawias okrągły silnik przecinek LOW zamknij nawias okrągły średnik.
Linia 11. delay otwórz nawias okrągły 5000 zamknij nawias okrągły średnik.
Linia 12. zamknij nawias klamrowy.
int silnik = 6;
void setup() {
pinMode(silnik, OUTPUT);
}
void loop() {
digitalWrite(silnik, HIGH);
delay(2000);
digitalWrite(silnik, LOW);
delay(5000);
}
Oto efekt działania programu:
R1CE5avB8tXLJ
Film przedstawiający działanie układu. Po uruchomieniu układu silnik zaczyna się kręcić, następnie po chwili przestaje. Sytuacja powtarza się zgodnie z zadaną uprzednio częstotliwością.
Film przedstawiający działanie układu. Po uruchomieniu układu silnik zaczyna się kręcić, następnie po chwili przestaje. Sytuacja powtarza się zgodnie z zadaną uprzednio częstotliwością.
Źródło: Contentplus.pl Sp. z o.o., licencja: CC BY-SA 3.0.
Źródło: Contentplus.pl Sp. z o.o., licencja: CC BY-SA 3.0.
Film przedstawiający działanie układu. Po uruchomieniu układu silnik zaczyna się kręcić, następnie po chwili przestaje. Sytuacja powtarza się zgodnie z zadaną uprzednio częstotliwością.
Mostek H
Mostek H to układ służący do sterowania kierunkiem obrotów wirnika silnika DC. Składa się on z czterech przełączników. Jeżeli styki przełączników znajdujących się po jednej z przekątnych są zamknięte, to właśnie przez nie płynie prąd, a wirnik silnika obraca się w jedną stronę. Jeżeli je otworzymy, a zamkniemy dwa pozostałe styki, prąd zmieni kierunek, a w rezultacie wirnik silnika zacznie obracać się w drugą stronę.
RQ09n3JV3b7SQ
Ilustracja przedstawia konfigurację mostka H używanego do sterowania silnikiem ułożonym pośrodku układu. Przedstawiono 3 wersje przepływu prądu względem zamknięcia przełączników. Grafiki zawierają katodę układu u góry i anodę u dołu, od każdej odchodzą równolegle dwa przełączniki. Przełączniki jak i od katody, jak i od anody spotykają się przy wspólnych węzłach po lewej i po prawej stronie silnika. Pierwszy rysunek przedstawia wszystkie przełączniki otwarte, a więc silnik się nie kręci. Drugi rysunek przedstawia lewy górny i prawy dolny przełącznik zamknięty, tak więc silnik kręci się w prawo. Natomiast trzeci, i ostani rysunek, przedstawia prawy górny i lewy dolny przełącznik zamknięty, a więc silnik kręci się w lewo.
Mostek H nie jest samodzielnym elementem elektronicznym. Wmontowany jest np. w układ L293D (w zasadzie układ ten zawiera dwa mostki H), czyli sterownik dwóch silników. Z takiego sterownika skorzystamy. Dostępny jest również układ w wersji L293, jednak wersja bez oznaczenia „D” nie ma wbudowanych diod zabezpieczających przed przepięciami. Używając układu L293D nie musimy się martwić, że prąd wygenerowany przez poruszający się siłą bezwładności silnik (po wyłączeniu) spali jakiś element.
Układ L293D pokazujemy na zdjęciu niżej. Zwróć uwagę na wycięcie w kształcie półokręgu – dzięki niemu wiemy, z której strony znajdują się konkretne wyprowadzenia.
RLMlHYXqx4B7D
Zdjęcie przedstawia komponent elektroniczny, który po każdej stronie prostopadłościennej bryły posiada po 8 nóżek. Na obudowie wyczuwalne jak i widoczne jest półkoliste wyżłobienie oznaczające górę komponentu.
Źródło: Contentplus.pl Sp. z o.o., licencja: CC BY-SA 3.0.
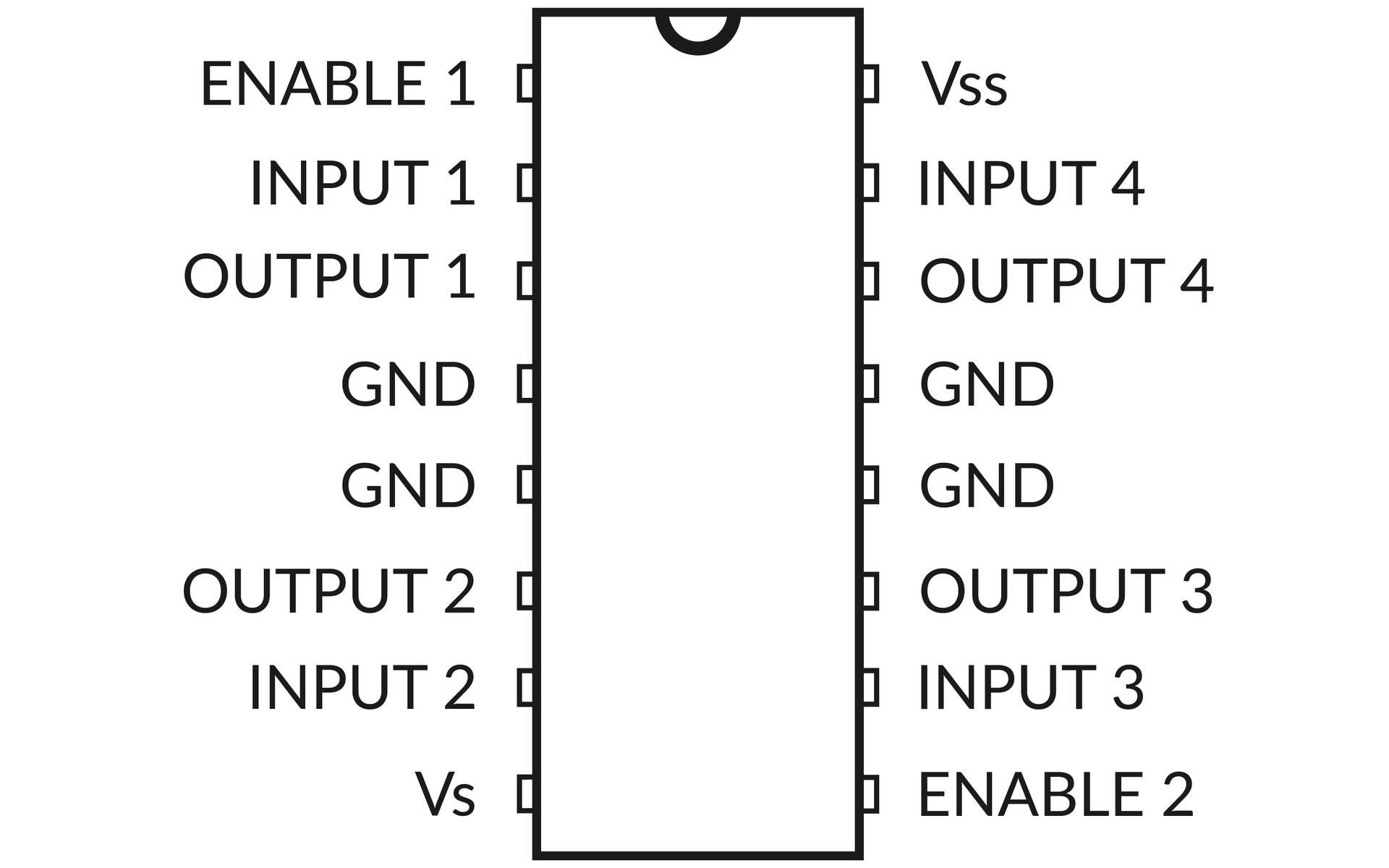
Układ L293D ma 16 wyprowadzeń o następujących oznaczeniach:
ENABLE 1 – włączenie kanałów 1 i 2
INPUT 1 – wejście kanału 1
OUTPUT 1 – wyjście kanału 1
GND – masa
GND – masa
OUTPUT 2 – wyjście kanału 2
INPUT 2 – wejście kanału 2
Vs – zasilanie silnika (4,5–36 V)
Vss – zasilanie części logicznej (5 V)
INPUT 4 – wejście kanału 4
OUTPUT 4 – Wyjście kanału 4
GND – masa
GND – masa
OUTPUT 3 – wyjście kanału 3
INPUT 3 – wejście kanału 3
ENABLE 2 – włączenie kanałów 3 i 4
RLm0J0hzvchIp
Ilustracja przedstawia rozkład pinów komponentu elektronicznego. Prostokąt posiada oznaczone po 8 pinów po każdej stronie, oznaczeniem góry prostokąta jest półkole u góry, przy krótszej ściance prostokąta. Względem wskazówek zegara, zaczynając od prawego górnego rogu, piny to: Vss, Input 4 , OUTPUT 4, GND, GND, OUTPUT 3, INPUT 3, ENABLE, VS, INPUT 2, OUTPUT 2, GND, GND, OUTPUT 1, INPUT 1, ENABLE.
Tinkercad
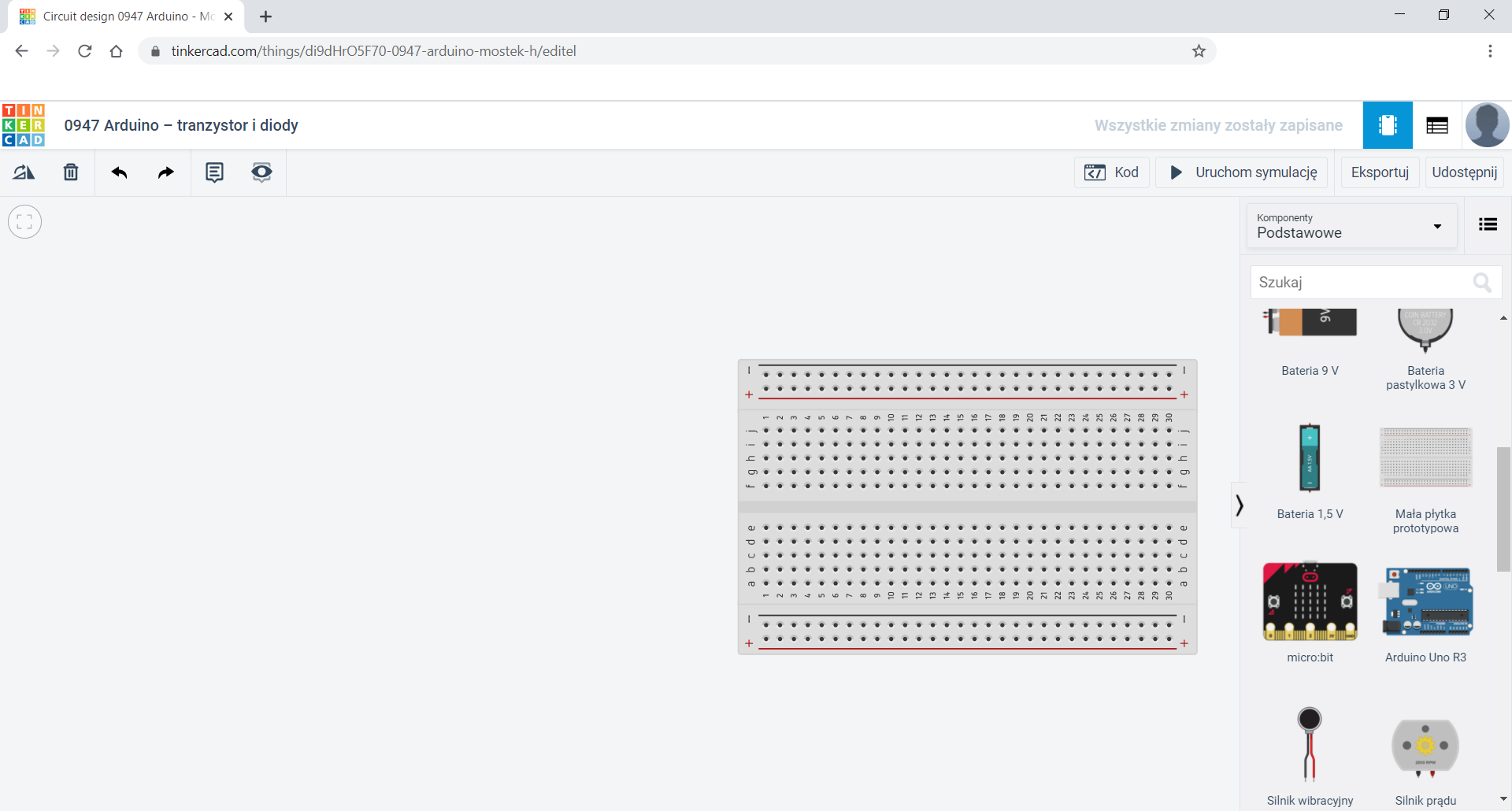
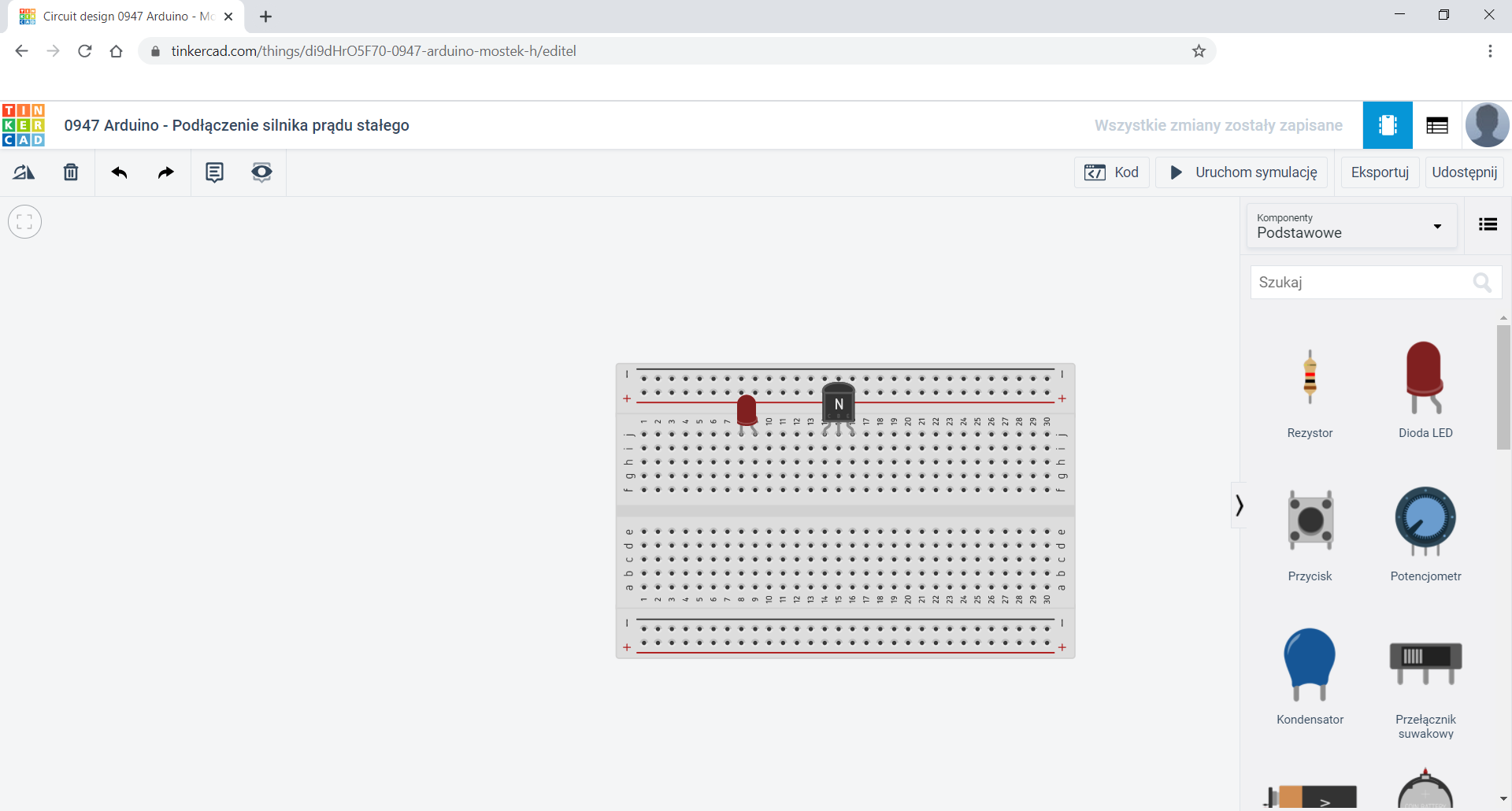
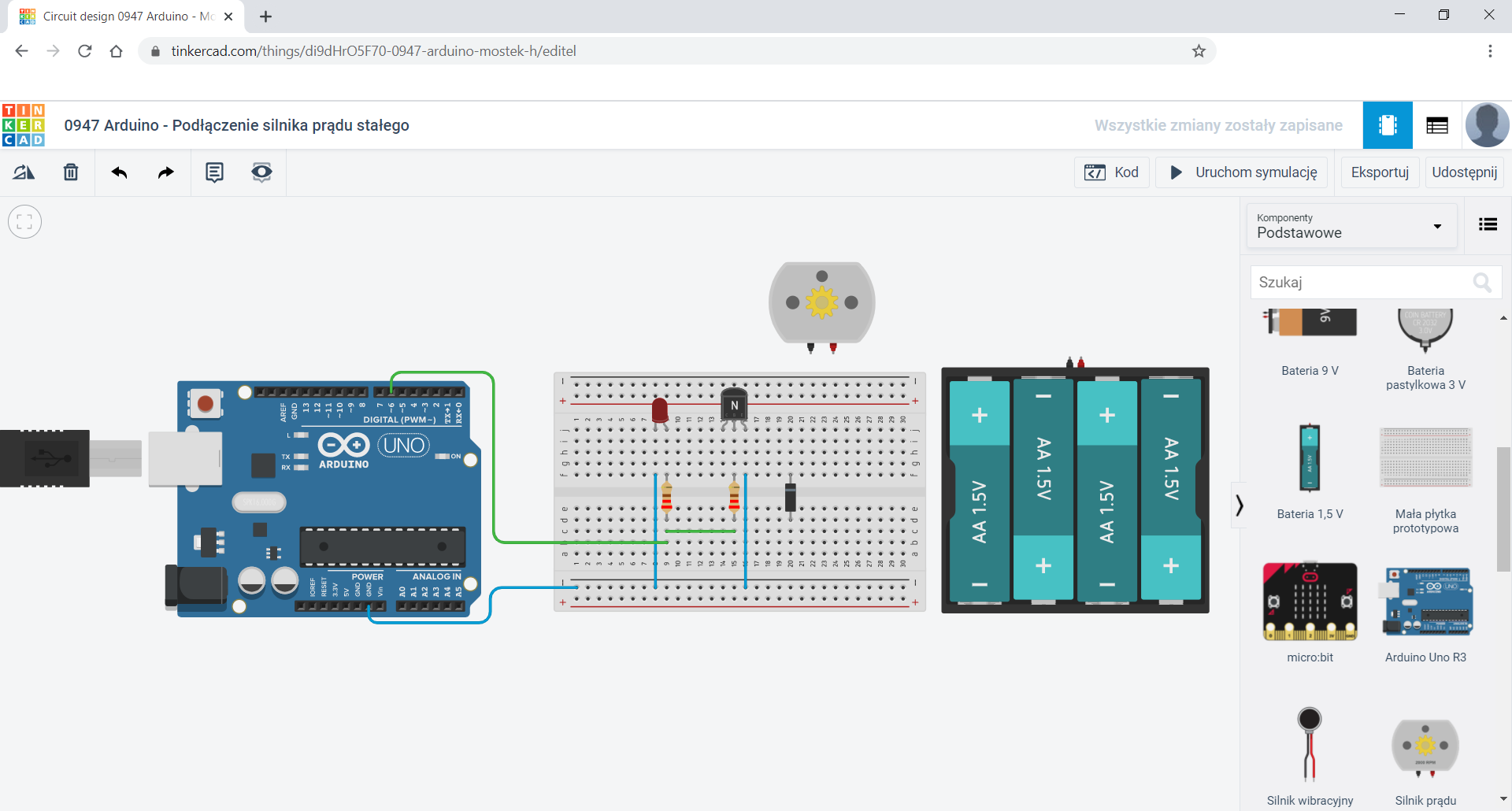
Zróbmy symulację za pomocą środowiska Tinkercad.
R1ZtJCTymCQuw
Zdjęcie ekranu przedstawia okno przeglądarki, w której otwarta jest strona tinkercad. W głównym oknie strony nie znajdują się jeszcze żadne komponenty, natomiast po prawej stronie otwarty jest pasek z ich listą w postaci kafelek.
Dodaj do głównego okna symulatora płytkę stykową.
Rx0aNQIiUMkwg
Zdjęcie ekranu przedstawia okno przeglądarki, w której otwarta jest strona tinkercad. Po prawej stronie otwarty jest pasek z listą elementów w postaci kafelek. Na głównym ekranie ustawiona została płytka stykowa.
Do płytki stykowej dodaj tranzystor NPN.
RKXJK4lqBTbKL
Zdjęcie ekranu przedstawia okno przeglądarki, w której otwarta jest strona tinkercad. Po prawej stronie otwarty jest pasek z listą elementów w postaci kafelek. Na głównym ekranie ustawiona została płytka stykowa, na której znajduje się: tranzystor BJT NPN.
Dodaj teraz pięć diod LED.
R1014iSToUg5N
Zdjęcie ekranu przedstawia okno przeglądarki, w której otwarta jest strona tinkercad. Po prawej stronie otwarty jest pasek z listą elementów w postaci kafelek. Na głównym ekranie ustawiona została płytka stykowa, na której znajduje się: tranzystor BJT NPN, 5 LED w tym samym rzędzie.
Do każdej anody diody dodaj rezystor o wartości 220 Ωomega.
R14OpwjEDUjcD
Zdjęcie ekranu przedstawia okno przeglądarki, w której otwarta jest strona tinkercad. Po prawej stronie otwarty jest pasek z listą elementów w postaci kafelek. Na głównym ekranie ustawiona została płytka stykowa, na której znajduje się: tranzystor BJT NPN, 5 LED w tym samym rzędzie, szeregowo podłączone do LED 5 rezystorów.
Do bazy tranzystora dodaj rezystor o wartości 220Ωomega.
R1JVgv6pOPoEs
Zdjęcie ekranu przedstawia okno przeglądarki, w której otwarta jest strona tinkercad. Po prawej stronie otwarty jest pasek z listą elementów w postaci kafelek. Na głównym ekranie ustawiona została płytka stykowa, na której znajduje się: tranzystor BJT NPN, 5 LED w tym samym rzędzie, szeregowo podłączone do LED 5 rezystorów, podłączona szeregowo do bazy BJT rezystor.
Połącz wszystkie katody diod LED i podepnij je pod kolektor tranzystora.
Rv77vQNN19FKH
Zdjęcie ekranu przedstawia okno przeglądarki, w której otwarta jest strona tinkercad. Po prawej stronie otwarty jest pasek z listą elementów w postaci kafelek. Na głównym ekranie ustawiona została płytka stykowa, na której znajduje się: tranzystor BJT NPN, 5 LED w tym samym rzędzie, szeregowo podłączone do LED 5 rezystorów, podłączona szeregowo do bazy BJT rezystor. Wszystkie katody LED są podłączone kablami do kolektora BJT.
Wolne nóżki rezystorów podpiętych pod diody podepnij pod dodatnią szynę płytki.
RYJL3C8065Src
Zdjęcie ekranu przedstawia okno przeglądarki, w której otwarta jest strona tinkercad. Po prawej stronie otwarty jest pasek z listą elementów w postaci kafelek. Na głównym ekranie ustawiona została płytka stykowa, na której znajduje się: tranzystor BJT NPN, 5 LED w tym samym rzędzie, szeregowo podłączone do LED 5 rezystorów, podłączona szeregowo do bazy BJT rezystor. Wszystkie katody LED są podłączone kablami do kolektora BJT, natomiast rezystory podłączone do LED są także podłączone do dodatniej szyny płytki.
Dodaj moduł Arduino Uno do okna symulacji.
RjMFQhW38AjYi
Zdjęcie ekranu przedstawia okno przeglądarki, w której otwarta jest strona tinkercad. Po prawej stronie otwarty jest pasek z listą elementów w postaci kafelek. Na głównym ekranie ustawiona została płytka stykowa, na której znajduje się: tranzystor BJT NPN, 5 LED w tym samym rzędzie, szeregowo podłączone do LED 5 rezystorów, podłączona szeregowo do bazy BJT rezystor. Wszystkie katody LED są podłączone kablami do kolektora BJT, natomiast rezystory podłączone do LED są także podłączone do dodatniej szyny płytki. Z lewej strony dostawiono arduino uno, widoczny także jest niepodłączony kabel usb.
Pin 5V Arduino podepnij pod dodatnią szynę płytki.
RGtk1UvV9x4yL
Zdjęcie ekranu przedstawia okno przeglądarki, w której otwarta jest strona tinkercad. Po prawej stronie otwarty jest pasek z listą elementów w postaci kafelek. Na głównym ekranie ustawiona została płytka stykowa, na której znajduje się: tranzystor BJT NPN, 5 LED w tym samym rzędzie, szeregowo podłączone do LED 5 rezystorów, podłączona szeregowo do bazy BJT rezystor. Wszystkie katody LED są podłączone kablami do kolektora BJT, natomiast rezystory podłączone do LED są także podłączone do dodatniej szyny płytki. Z lewej strony dostawiono arduino uno, widoczny także jest niepodłączony kabel usb. Arduino podłączone z pinu 5V jest do dodatniej szyny płytki.
Pin GND Arduino podepnij do emitera tranzystora.
RKlLZ2TlBuAts
Zdjęcie ekranu przedstawia okno przeglądarki, w której otwarta jest strona tinkercad. Po prawej stronie otwarty jest pasek z listą elementów w postaci kafelek. Na głównym ekranie ustawiona została płytka stykowa, na której znajduje się: tranzystor BJT NPN, 5 LED w tym samym rzędzie, szeregowo podłączone do LED 5 rezystorów, podłączona szeregowo do bazy BJT rezystor. Wszystkie katody LED są podłączone kablami do kolektora BJT, natomiast rezystory podłączone do LED są także podłączone do dodatniej szyny płytki. Z lewej strony dostawiono arduino uno, widoczny także jest niepodłączony kabel usb. Arduino podłączone z pinu 5V jest do dodatniej szyny płytki, natomiast GND z arduino podłączone jest do emitera BJT.
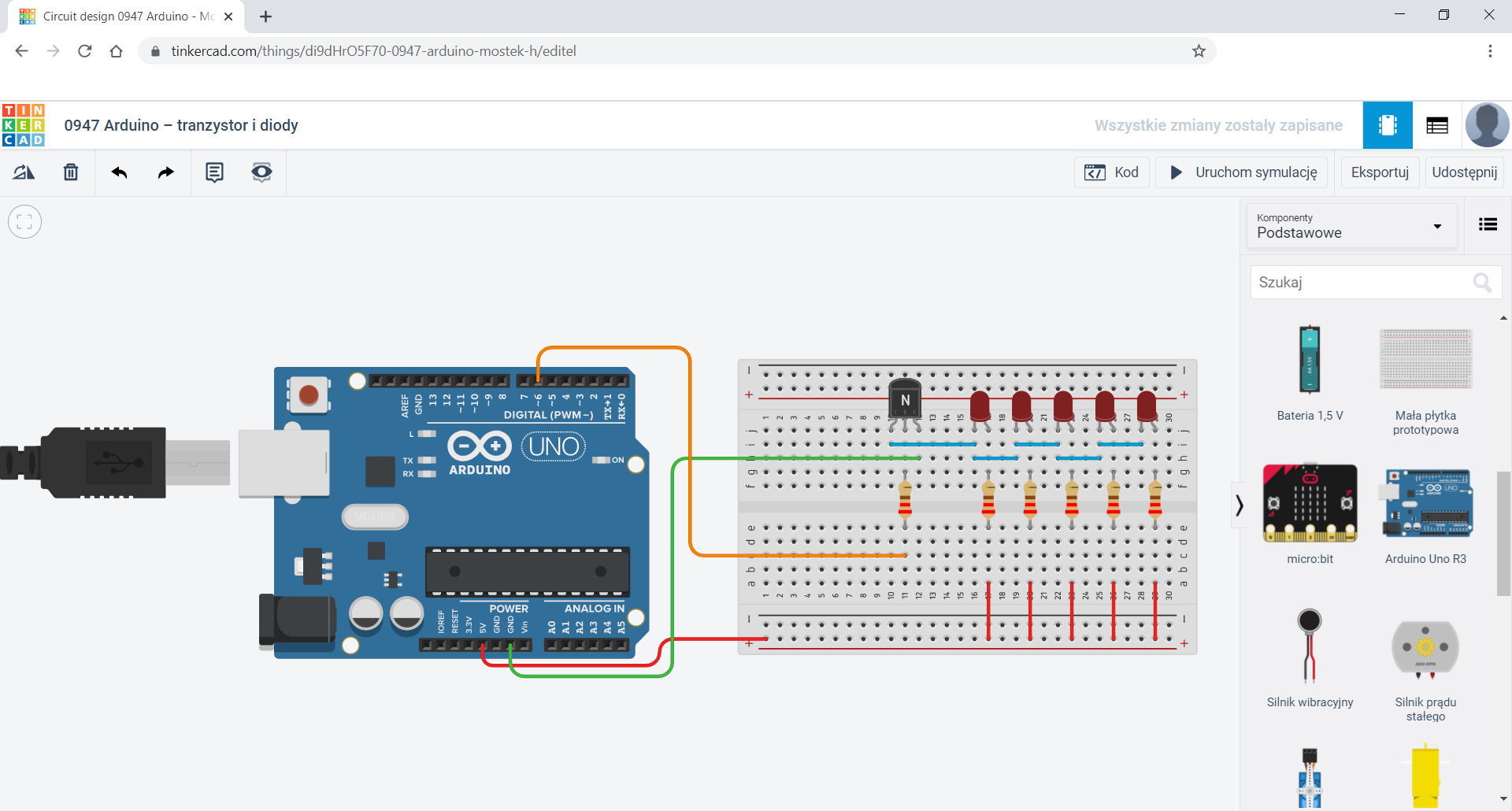
Wolną nóżkę rezystora wpiętego do bazy tranzystora podepnij pod pin D6 Arduino.
RC2CAXw31umH4
Zdjęcie ekranu przedstawia okno przeglądarki, w której otwarta jest strona tinkercad. Po prawej stronie otwarty jest pasek z listą elementów w postaci kafelek. Na głównym ekranie ustawiona została płytka stykowa, na której znajduje się: tranzystor BJT NPN, 5 LED w tym samym rzędzie, szeregowo podłączone do LED 5 rezystorów, podłączona szeregowo do bazy BJT rezystor. Wszystkie katody LED są podłączone kablami do kolektora BJT, natomiast rezystory podłączone do LED są także podłączone do dodatniej szyny płytki. Z lewej strony dostawiono arduino uno, widoczny także jest niepodłączony kabel usb. Arduino podłączone z pinu 5V jest do dodatniej szyny płytki, natomiast GND z arduino podłączone jest do emitera BJT. Pin 6 arduino podłączony jest do rezystora przy bazie BJT.
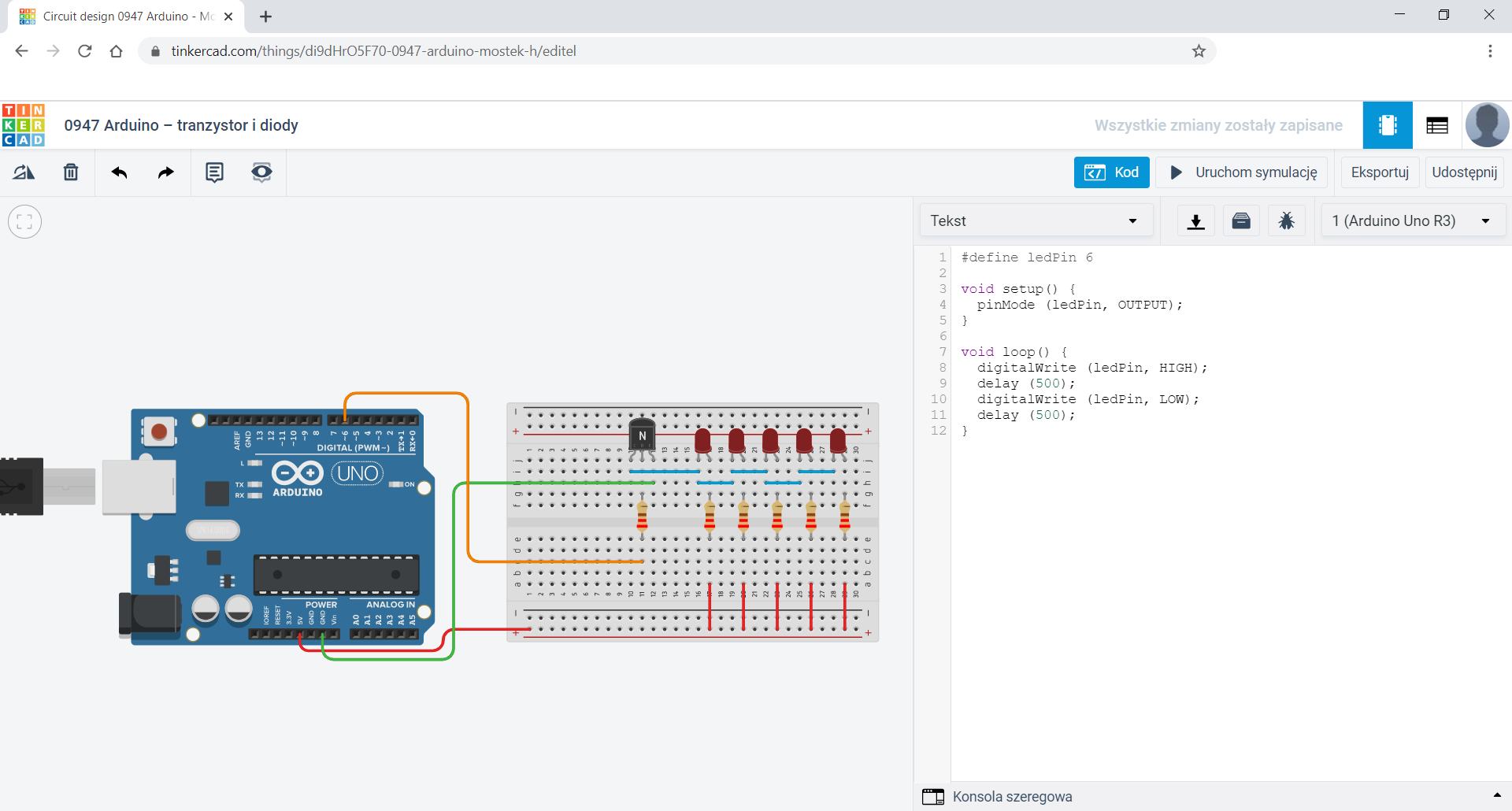
Przejdźmy teraz do pisania kodu. W tym celu klikamy na przycisk Kod, z listy rozwijanej wybieramy Tekst, potwierdzamy chęć zmiany widoku i czyścimy zawartość.
Przepisz kod, dopasuj widok okna i uruchom symulację.
RwcxI2kNzhUVy
Zdjęcie ekranu przedstawia okno przeglądarki, w której otwarta jest strona tinkercad. Na głównym ekranie ustawiona została płytka stykowa, na której znajduje się: tranzystor BJT NPN, 5 LED w tym samym rzędzie, szeregowo podłączone do LED 5 rezystorów, podłączona szeregowo do bazy BJT rezystor. Wszystkie katody LED są podłączone kablami do kolektora BJT, natomiast rezystory podłączone do LED są także podłączone do dodatniej szyny płytki. Z lewej strony dostawiono arduino uno, widoczny także jest niepodłączony kabel usb. Arduino podłączone z pinu 5V jest do dodatniej szyny płytki, natomiast GND z arduino podłączone jest do emitera BJT. Pin 6 arduino podłączony jest do rezystora przy bazie BJT. Po prawej stronie otwarto okno z kodem arduino, jest to: #define ledPin 6 void setup(){ pinMode(ledPin, OUTPUT); } void loop(){ digitalWrite(ledPin, HIGH); delay(500); digitalWrite(ledPin, LOW); delay(500); }
Zastąpimy teraz diody silnikiem DC. Jak wiadomo, silnik wymaga odpowiedniego zasilania. W związku z tym, że każdy silnik pracuje przy określonym napięciu, zastosujemy zewnętrzne źródło zasilania.
Teoretycznie nasz silnik można zasilać wprost z płytki Arduino. Jednak ze względu na bezpieczeństwo elementów na płytce i możliwość użycia więcej niż jednego silnika (na przykład w przypadku pojazdów zazwyczaj stosuje się co najmniej dwa silniki), które również mogą wymagać większego napięcia, bardziej sensowne wydaje się wykorzystanie zewnętrznego źródła zasilania.
Zanim jednak przejdziemy do budowy układu, musimy poznać jeszcze jeden element elektroniczny. Jest nim dioda prostownicza.
R1VrubhMvMjhq
Zdjęcie przedstawia diodę o małym ciele komponentu, kształtem przypomina walec, z którego podstaw wystają 2 kable.
Dioda prostownicza 1N4148
W przeciwieństwie do diody LED nie emituje ona światła, lecz prostuje prąd. Co to znaczy? Załóżmy, że chcemy włączyć silnik, a następnie go wyłączyć. Jeszcze przez chwilę po wyłączeniu silnika wirnik będzie się kręcić. Działa on wówczas jak prądnica, czyli zmienia energię mechaniczną w energię elektryczną. Prąd błądzący, czyli właśnie ten, który może powstać po wyłączeniu silnika, jest w stanie uszkodzić płytkę Arduino. Dlatego musimy go zablokować. W diodzie prostowniczej prąd przepływa tylko w jednym kierunku – od anody do katody.
Niżej pokazujemy schemat podłączenia silnika wraz z zewnętrznym źródłem zasilania. Należy pamiętać, że strzałka w symbolu diody prostowniczej ściśle określa kierunek prądu, natomiast kreska oznacza, że prąd nie może przez tę diodę wrócić.
Do naszego układu z silnikiem dodałem jeszcze diodę LED, która będzie włączana razem z silnikiem.
RqYFgBRpu6SwW
Ilustracja przedstawia schemat elektryczny połączeń silnika elektrycznego do arduino uno. Pin GND podłączony jest do wspólnego uziemienia. Pin D6 podłączony jest do bazy BJT poprzez rezystor 220 om, jak i równolegle do LED poprzez rezystor 220 om. Do kolektora BJT podłączony jest silnik wokół, którego podłączona jest dioda, anodą podłączona jest do kolektora, natomiast katoda diody jak i anoda silnika podłączone są do baterii. Ujemny terminal baterii podłączony jest do wspólnego uziemienia tak samo jak emiter BJT.
Co nam będzie potrzebne:
płytka stykowa,
2 rezystory o wartości 220 Ωomega,
dioda LED,
tranzystor NPN 2N2222,
silnik DC,
koszyk na 4 baterie AA,
4 baterie AA,
Arduino Uno,
przewody połączeniowe męsko‑męskie,
kabel USB typu A B do podłączenia do komputera.
Zaczniemy od wpięcia tranzystora w płytkę stykową.
RDyM823xDyP3q
Zdjęcie przedstawia płytkę stykową, na której podłączonej jest tranzystor BJT.
Następnie do bazy (środkowa nóżka) dopinamy jedną nóżkę rezystora.
R3iMhxt5PNPRJ
Zdjęcie przedstawia płytkę stykową, na której podłączonej jest tranzystor BJT. Do bazy podłączony jest rezystor.
Do wolnej nóżki rezystora, dopinamy drugi rezystor.
Ryc3Bs7KGJWuy
Zdjęcie przedstawia płytkę stykową, na której podłączonej jest tranzystor BJT. Do bazy podłączony jest rezystor, do którego drugiej nóżki podłączony jest kolejny.
Do wolnej nóżki drugiego rezystora podepniemy anodę diody LED. A jej katodę w ujemną szynę płytki stykowej.
RFBjNaPzwCoDS
Zdjęcie przedstawia płytkę stykową, na której podłączonej jest tranzystor BJT. Do bazy podłączony jest rezystor, do którego drugiej nóżki podłączony jest kolejny jego druga nóżka podłączona jest do LED. Dioda swoją katodą podłączona jest do wspólnego uziemienia.
Emiter tranzystora (pierwsza nóżka) podepniemy do ujemnej szyny płytki.
R1O6suWAB8LT7
Zdjęcie przedstawia płytkę stykową, na której podłączonej jest tranzystor BJT. Do bazy podłączony jest rezystor, do którego drugiej nóżki podłączony jest kolejny jego druga nóżka podłączona jest do LED. Dioda swoją katodą podłączona jest do wspólnego uziemienia, do którego podłączono także poprzez kabel emiter BJT.
A ujemną szynę z pinem GND Arduino Uno.
RVQZfmvAEGNqr
Zdjęcie przedstawia płytkę stykową, na której podłączonej jest tranzystor BJT. Do bazy podłączony jest rezystor, do którego drugiej nóżki podłączony jest kolejny jego druga nóżka podłączona jest do LED. Dioda swoją katodą podłączona jest do wspólnego uziemienia, do którego podłączono także poprzez kabel emiter BJT. Wspólne uziemienie zostało podłączone do pinu GND arduino.
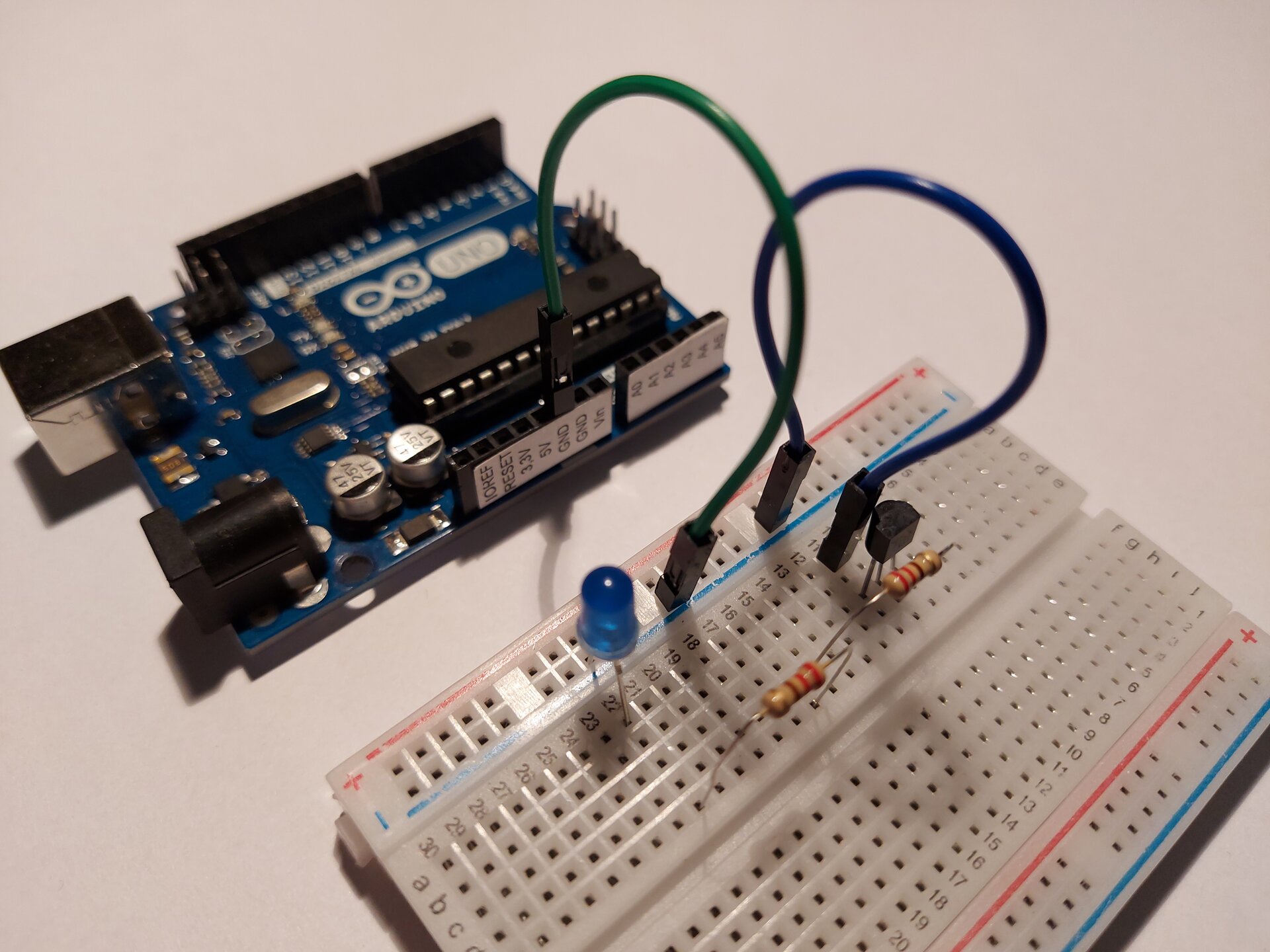
Miejsce w którym mamy podpięte dwie nóżki rezystorów R1 i R2 podpinamy z pinem 6 Arduino.
R1921Fr9YMgvM
Zdjęcie przedstawia płytkę stykową, na której podłączonej jest tranzystor BJT. Do bazy podłączony jest rezystor, do którego drugiej nóżki podłączony jest kolejny jego druga nóżka podłączona jest do LED. Dioda swoją katodą podłączona jest do wspólnego uziemienia, do którego podłączono także poprzez kabel emiter BJT. Wspólne uziemienie zostało podłączone do pinu GND arduino. Z pinu 6 podłączono kabel do wspólnego węzła rezystorów.
Do kolektora tranzystora (trzecia nóżka) podpinamy jeden kabelek silnika. I dodatkowo podpinamy anodę diody prostowniczej 1N4148, a jej katodę razem z drugim kabelkiem silnika w dodatnią szynę płytki stykowej.
Rhdgroydkhpdy
Zdjęcie przedstawia płytkę stykową, na której podłączonej jest tranzystor BJT. Do bazy podłączony jest rezystor, do którego drugiej nóżki podłączony jest kolejny jego druga nóżka podłączona jest do LED. Dioda swoją katodą podłączona jest do wspólnego uziemienia, do którego podłączono także poprzez kabel emiter BJT. Wspólne uziemienie zostało podłączone do pinu GND arduino. Z pinu 6 podłączono kabel do wspólnego węzła rezystorów. Do kolektora podłączono anodę diody jak i jeden kabel silnika, katoda i pozostały kabel silnika podłączono do pinu dodatniego płytki.
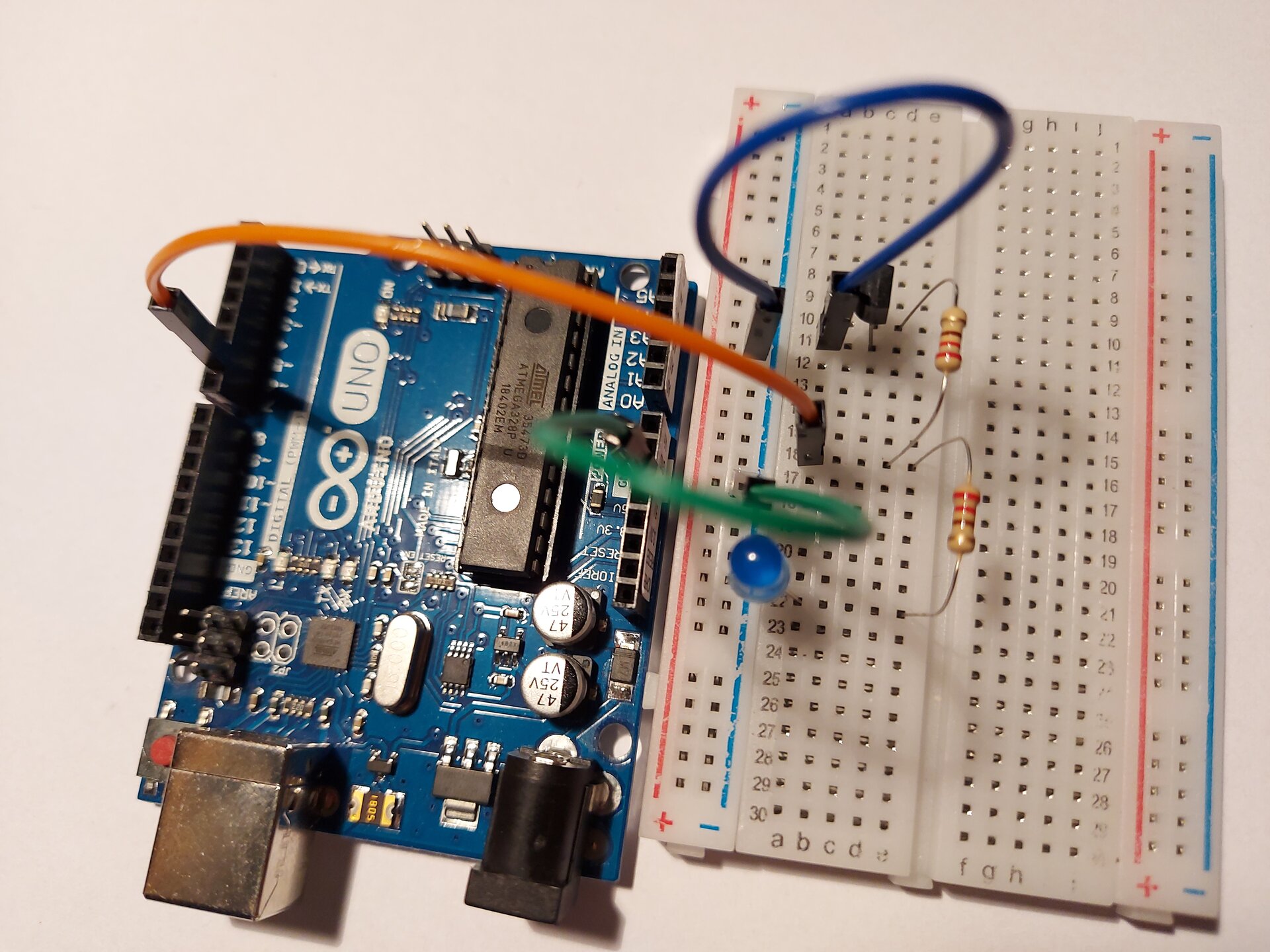
Teraz pora podpiąć koszyczek z bateriami. + podpinamy do dodatniej szyny płytki, a - do ujemnej.
R1TM2eP7XTy6N
Zdjęcie przedstawia płytkę stykową, na której podłączonej jest tranzystor BJT. Do bazy podłączony jest rezystor, do którego drugiej nóżki podłączony jest kolejny jego druga nóżka podłączona jest do LED. Dioda swoją katodą podłączona jest do wspólnego uziemienia, do którego podłączono także poprzez kabel emiter BJT. Wspólne uziemienie zostało podłączone do pinu GND arduino. Z pinu 6 podłączono kabel do wspólnego węzła rezystorów. Do kolektora podłączono anodę diody jak i jeden kabel silnika, katoda i pozostały kabel silnika podłączono do pinu dodatniego płytki. Do szyny dodatniej podłączono kabel zestawu baterii, tak samo pozostały kabel podłączono do wspólnego uziemienia.
Przejdźmy do kodu programu.
Na początek definiujemy pin do którego wpięta jest przez rezystor baza naszego tranzystora.
Linia 1. kratka define silnik 6.
#define silnik 6
W pętli setup() ostawiamy pin 6 jako wyjście.
Linia 1. pinMode otwórz nawias okrągły silnik przecinek OUTPUT zamknij nawias okrągły średnik.
pinMode (silnik, OUTPUT);
W pętli loop() wpisujemy sekwencję świecenia i gaszenia diod LED co pół sekundy.
Linia 1. digitalWrite otwórz nawias okrągły silnik przecinek HIGH zamknij nawias okrągły średnik.
Linia 2. delay otwórz nawias okrągły 2000 zamknij nawias okrągły średnik.
Linia 3. digitalWrite otwórz nawias okrągły silnik przecinek LOW zamknij nawias okrągły średnik.
Linia 4. delay otwórz nawias okrągły 5000 zamknij nawias okrągły średnik.
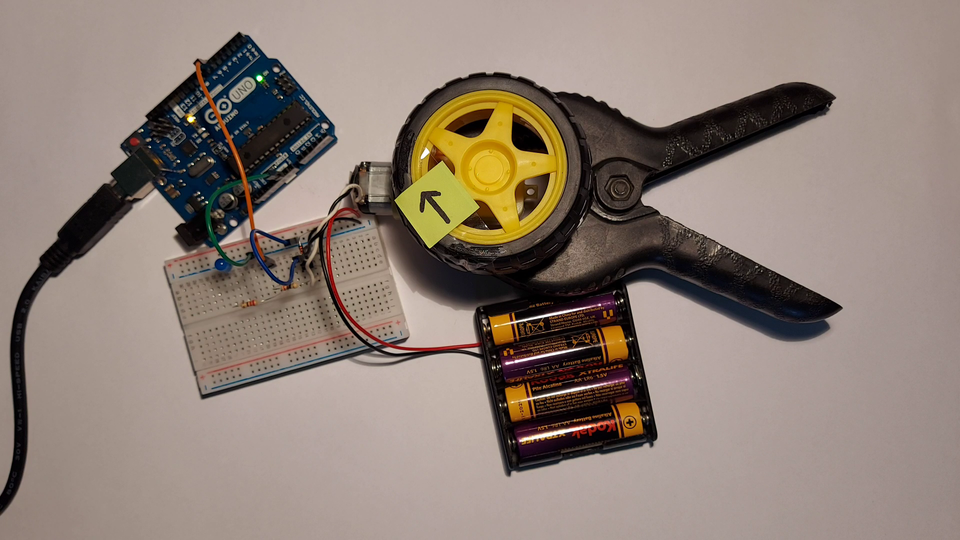
Film przedstawia działanie układu, po uruchomieniu silnika zamontowane na nim koło kręci się przeciwnie względem wskazówek zegara.
Zróbmy symulację, za pomocą środowiska Tinkercad.
Dodaj do głównego okna symulatora płytkę stykową.
ROdkne6T6bLT2
Zdjęcie przedstawia okno przeglądarki, w której otwarta jest strona Tinkercad, ułożony pośrodku obszaru edycji jest pusta płytka stykowa.
Dodaj do płytki tranzystor NPN.
RVIY5oa14hmT3
Zdjęcie przedstawia okno przeglądarki, w której otwarta jest strona Tinkercad, ułożony pośrodku obszaru edycji jest płytka stykowa, na której ustawiony jest tranzystor BJT z oznaczeniem litery 'N'.
Znajdź i dodaj diodę LED.
R1QbLyt9YTk4F
Zdjęcie przedstawia okno przeglądarki, w której otwarta jest strona Tinkercad, ułożony pośrodku obszaru edycji jest płytka stykowa, na której ustawiony jest tranzystor BJT z oznaczeniem litery 'N'. Po lewej stronie ustawiono LED.
Dodaj dwa rezystory o wartości 220 Ωomega. Jeden dodaj do anody diody LED, drugi dodaj do bazy tranzystora.
RVrYt5iBwIYqU
Zdjęcie przedstawia okno przeglądarki, w której otwarta jest strona Tinkercad, ułożony pośrodku obszaru edycji jest płytka stykowa, na której ustawiony jest tranzystor BJT z oznaczeniem litery 'N'. Po lewej stronie ustawiono LED, do której anody podłączono rezystor. Do bazy BJT podłączono rezystor.
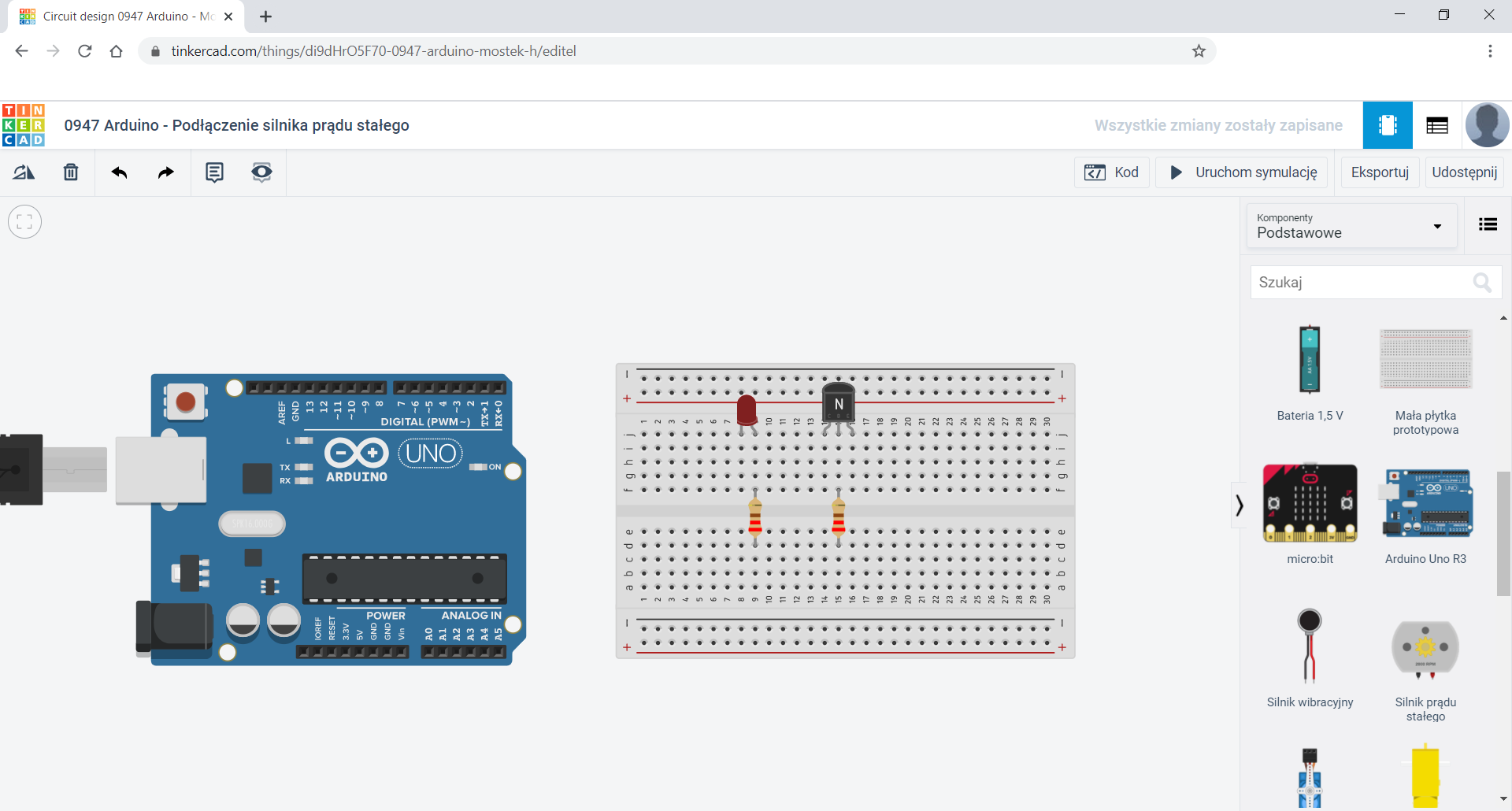
Dodaj moduł Arduino Uno do okna symulacji.
R5S0D1nHZCC2P
Zdjęcie przedstawia okno przeglądarki, w której otwarta jest strona Tinkercad, ułożony pośrodku obszaru edycji jest płytka stykowa, na której ustawiony jest tranzystor BJT z oznaczeniem litery 'N'. Po lewej stronie ustawiono LED, do której anody podłączono rezystor. Do bazy BJT podłączono rezystor. Po lewej stronie dostawiono arduino uno wraz z niepodpiętym kablem USB-B.
Katodę diody LED oraz emiter podłącz pod ujemną szynę płytki. Do tej szyny podepnij również pin GND Arduino.
R1QeXGhU1vXFG
Zdjęcie przedstawia okno przeglądarki, w której otwarta jest strona Tinkercad, ułożony pośrodku obszaru edycji jest płytka stykowa, na której ustawiony jest tranzystor BJT z oznaczeniem litery 'N'. Po lewej stronie ustawiono LED, do której anody podłączono rezystor. Do bazy BJT podłączono rezystor. Po lewej stronie dostawiono arduino uno wraz z niepodpiętym kablem USB-B, z pinu GND do uziemienia płytki podpięto kabel. Uziemienie podłączono do katody LED oraz drugim kablem do emitera BJT.
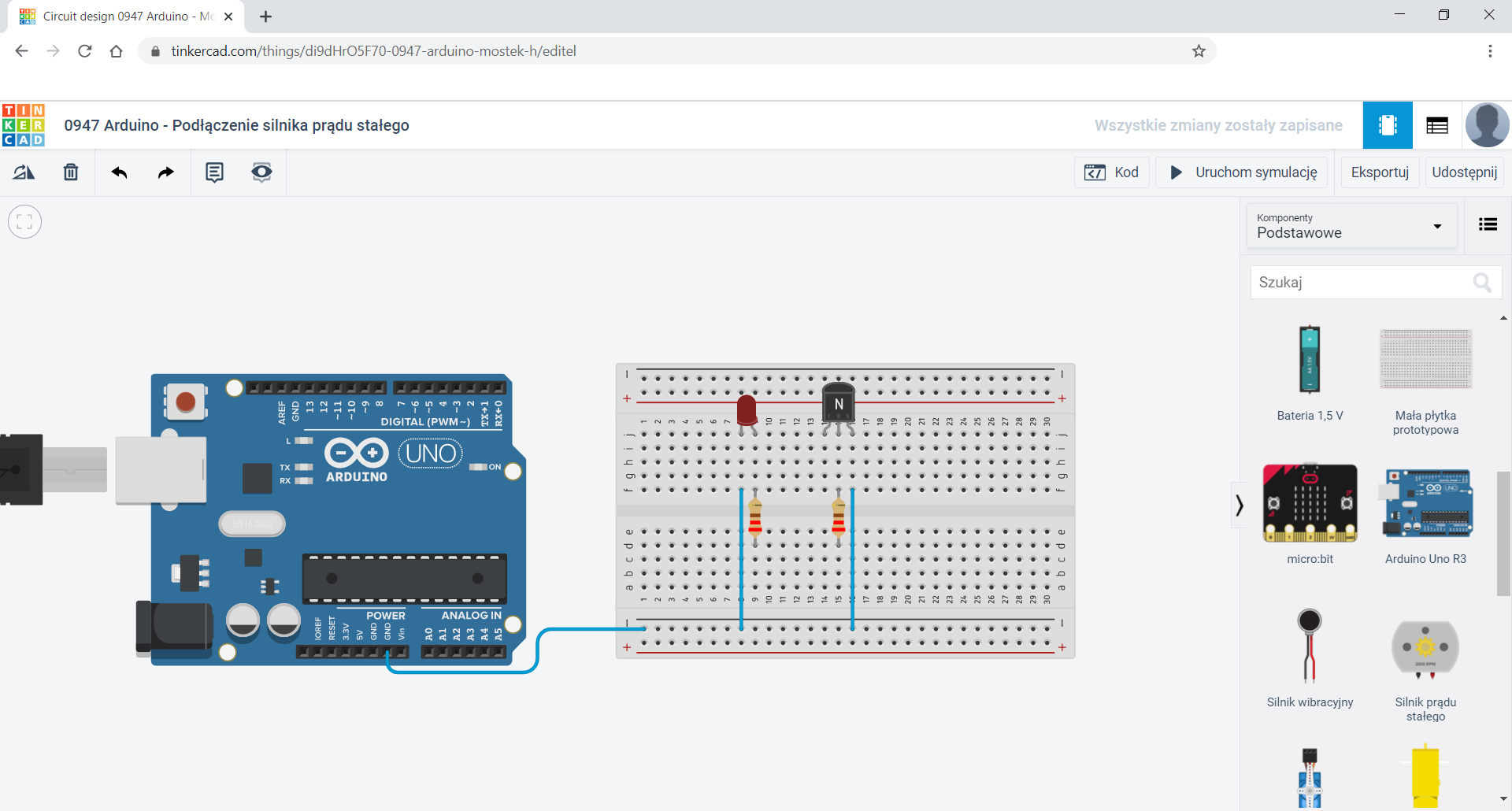
Wolne nóżki rezystorów połącz ze sobą, a następnie podepnij je pod pin D6 Arduino.
R1WITss1ITns7
Zdjęcie przedstawia okno przeglądarki, w której otwarta jest strona Tinkercad, ułożony pośrodku obszaru edycji jest płytka stykowa, na której ustawiony jest tranzystor BJT z oznaczeniem litery 'N'. Po lewej stronie ustawiono LED, do której anody podłączono rezystor. Do bazy BJT podłączono rezystor. Po lewej stronie dostawiono arduino uno wraz z niepodpiętym kablem USB-B, z pinu GND do uziemienia płytki podpięto kabel. Uziemienie podłączono do katody LED oraz drugim kablem do emitera BJT. Z pinu 6 podłączono kabel do obu rezystorów, tworząc połączenie równoległe.
Dołącz do płytki diodę prostowniczą.
RyxnQuydtQSjk
Zdjęcie przedstawia okno przeglądarki, w której otwarta jest strona Tinkercad, ułożony pośrodku obszaru edycji jest płytka stykowa, na której ustawiony jest tranzystor BJT z oznaczeniem litery 'N'. Po lewej stronie ustawiono LED, do której anody podłączono rezystor. Do bazy BJT podłączono rezystor. Po lewej stronie dostawiono arduino uno wraz z niepodpiętym kablem USB-B, z pinu GND do uziemienia płytki podpięto kabel. Uziemienie podłączono do katody LED oraz drugim kablem do emitera BJT. Z pinu 6 podłączono kabel do rezystora przy diodzie od niego kolejnym krótszym kablem podłączono drugi rezystor, w ten sposób utworzono połączenie równoległe. Obok prawego rezystora podłączono diodę prostowniczą, katodą skierowaną w dół.
Dodaj silnik prądu stałego do okna symulacji.
R1BwdABTnysvt
Zdjęcie przedstawia okno przeglądarki, w której otwarta jest strona Tinkercad, ułożony pośrodku obszaru edycji jest płytka stykowa, na której ustawiony jest tranzystor BJT z oznaczeniem litery 'N'. Po lewej stronie ustawiono LED, do której anody podłączono rezystor. Do bazy BJT podłączono rezystor. Po lewej stronie dostawiono arduino uno wraz z niepodpiętym kablem USB-B, z pinu GND do uziemienia płytki podpięto kabel. Uziemienie podłączono do katody LED oraz drugim kablem do emitera BJT. Z pinu 6 podłączono kabel do rezystora przy diodzie od niego kolejnym krótszym kablem podłączono drugi rezystor, w ten sposób utworzono połączenie równoległe. Obok prawego rezystora podłączono diodę prostowniczą, katodą skierowaną w dół. Na górze postawiono silnik elektryczny, jest nie podłączony.
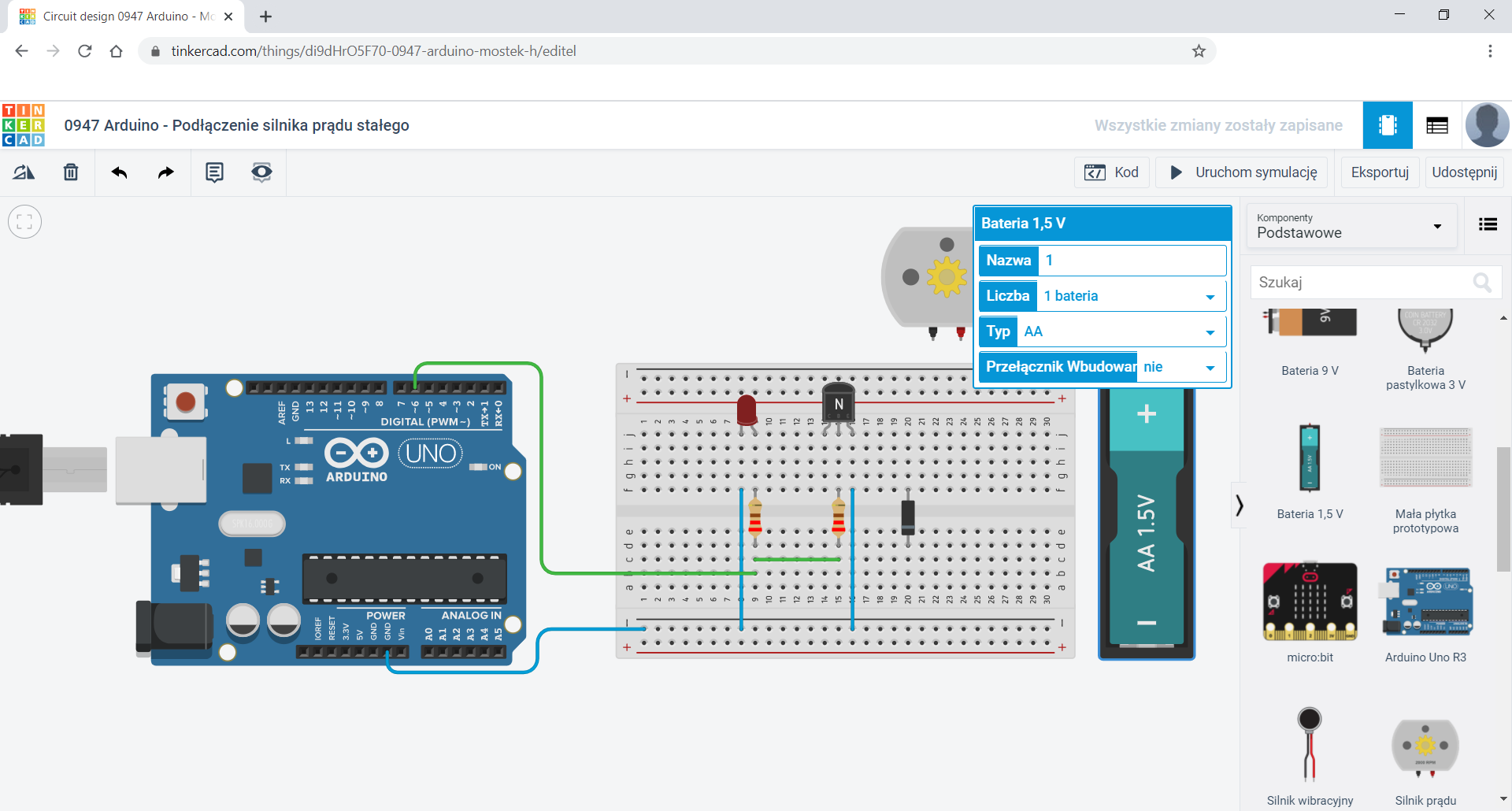
Do naszego okna symulacji dodaj teraz baterie.
R1VMbmDhQ7b0X
Zdjęcie przedstawia okno przeglądarki, w której otwarta jest strona Tinkercad, ułożony pośrodku obszaru edycji jest płytka stykowa, na której ustawiony jest tranzystor BJT z oznaczeniem litery 'N'. Po lewej stronie ustawiono LED, do której anody podłączono rezystor. Do bazy BJT podłączono rezystor. Po lewej stronie dostawiono arduino uno wraz z niepodpiętym kablem USB-B, z pinu GND do uziemienia płytki podpięto kabel. Uziemienie podłączono do katody LED oraz drugim kablem do emitera BJT. Z pinu 6 podłączono kabel do rezystora przy diodzie od niego kolejnym krótszym kablem podłączono drugi rezystor, w ten sposób utworzono połączenie równoległe. Obok prawego rezystora podłączono diodę prostowniczą, katodą skierowaną w dół. Na górze postawiono silnik elektryczny, jest nie podłączony. Obok płytki stykowej ułożono zestaw baterii, otwarto menu dla tego zasobu, widoczne są 4 parametry: nazwa - 1, liczba - 1 bateria, typ - AA oraz Przełącznik wbudowany - nie.
Z listy rozwijanej w pozycji liczba, wybierz 4 baterie. Dopasuj wygląd okna symulacji.
R39HYLsfil5K3
Zdjęcie przedstawia okno przeglądarki, w której otwarta jest strona Tinkercad, ułożony pośrodku obszaru edycji jest płytka stykowa, na której ustawiony jest tranzystor BJT z oznaczeniem litery 'N'. Po lewej stronie ustawiono LED, do której anody podłączono rezystor. Do bazy BJT podłączono rezystor. Po lewej stronie dostawiono arduino uno wraz z niepodpiętym kablem USB-B, z pinu GND do uziemienia płytki podpięto kabel. Uziemienie podłączono do katody LED oraz drugim kablem do emitera BJT. Z pinu 6 podłączono kabel do rezystora przy diodzie od niego kolejnym krótszym kablem podłączono drugi rezystor, w ten sposób utworzono połączenie równoległe. Obok prawego rezystora podłączono diodę prostowniczą, katodą skierowaną w dół. Na górze postawiono silnik elektryczny, jest nie podłączony. Obok płytki stykowej ułożono zestaw baterii, widoczne są 4 baterie AA 1.5V.
Kliknij na diodę prostowniczą i obróć ją o 180Indeks górny oo za pomocą przycisku Obróć. Przycisk znajduje się po lewej stronie okna, zaraz pod logiem Tinkercad.
RCCXhF2SJsEvE
Zdjęcie przedstawia okno przeglądarki, w której otwarta jest strona Tinkercad, ułożony pośrodku obszaru edycji jest płytka stykowa, na której ustawiony jest tranzystor BJT z oznaczeniem litery 'N'. Po lewej stronie ustawiono LED, do której anody podłączono rezystor. Do bazy BJT podłączono rezystor. Po lewej stronie dostawiono arduino uno wraz z niepodpiętym kablem USB-B, z pinu GND do uziemienia płytki podpięto kabel. Uziemienie podłączono do katody LED oraz drugim kablem do emitera BJT. Z pinu 6 podłączono kabel do rezystora przy diodzie od niego kolejnym krótszym kablem podłączono drugi rezystor, w ten sposób utworzono połączenie równoległe. Obok prawego rezystora podłączono diodę prostowniczą, katodą skierowaną w górę. Na górze postawiono silnik elektryczny, jest nie podłączony. Obok płytki stykowej ułożono zestaw baterii, widoczne są 4 baterie AA 1.5V.
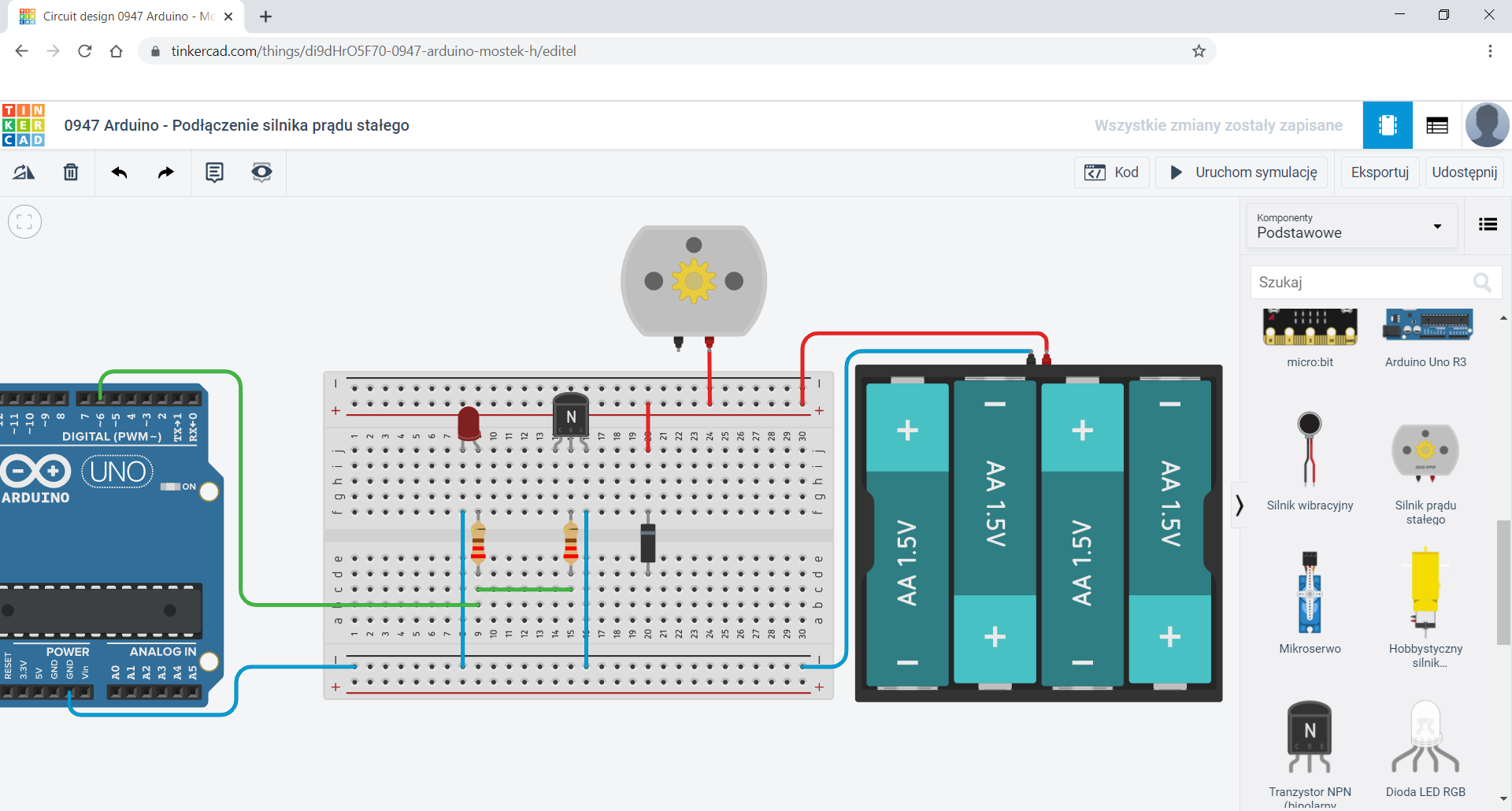
Pod dodatnią szynę płytki podepnij: katodę diody prostowniczej, dodatni pin silnika oraz dodatni pin baterii.
R1WjWWuafbKFQ
Zdjęcie przedstawia okno przeglądarki, w której otwarta jest strona Tinkercad, ułożony pośrodku obszaru edycji jest płytka stykowa, na której ustawiony jest tranzystor BJT z oznaczeniem litery 'N'. Po lewej stronie ustawiono LED, do której anody podłączono rezystor. Do bazy BJT podłączono rezystor. Po lewej stronie dostawiono arduino uno wraz z niepodpiętym kablem USB-B, z pinu GND do uziemienia płytki podpięto kabel. Uziemienie podłączono do katody LED oraz drugim kablem do emitera BJT. Z pinu 6 podłączono kabel do rezystora przy diodzie od niego kolejnym krótszym kablem podłączono drugi rezystor, w ten sposób utworzono połączenie równoległe. Obok prawego rezystora podłączono diodę prostowniczą, katodą skierowaną w górę. Na górze postawiono silnik elektryczny. Obok płytki stykowej ułożono zestaw baterii, widoczne są 4 baterie AA 1.5V. Silnik elektryczny podłączono pozytywnym terminalem do górnej dodatniej szyny płytki, tak samo jak katodę zestawu baterii oraz katodę diody prostowniczej.
Pod ujemną szynę podepnij ujemny pin baterii.
Rc8nkIr8cQkZf
Zdjęcie przedstawia okno przeglądarki, w której otwarta jest strona Tinkercad, ułożony pośrodku obszaru edycji jest płytka stykowa, na której ustawiony jest tranzystor BJT z oznaczeniem litery 'N'. Po lewej stronie ustawiono LED, do której anody podłączono rezystor. Do bazy BJT podłączono rezystor. Po lewej stronie dostawiono arduino uno wraz z niepodpiętym kablem USB-B, z pinu GND do uziemienia płytki podpięto kabel. Uziemienie podłączono do katody LED oraz drugim kablem do emitera BJT. Z pinu 6 podłączono kabel do rezystora przy diodzie od niego kolejnym krótszym kablem podłączono drugi rezystor, w ten sposób utworzono połączenie równoległe. Obok prawego rezystora podłączono diodę prostowniczą, katodą skierowaną w górę. Na górze postawiono silnik elektryczny. Obok płytki stykowej ułożono zestaw baterii, widoczne są 4 baterie AA 1.5V. Silnik elektryczny podłączono pozytywnym terminalem do górnej dodatniej szyny płytki, tak samo jak katodę zestawu baterii oraz katodę diody prostowniczej. Ujemny terminal baterii podłączono do dolnej ujemnej szyny, tym samym do pinu GND arduino.
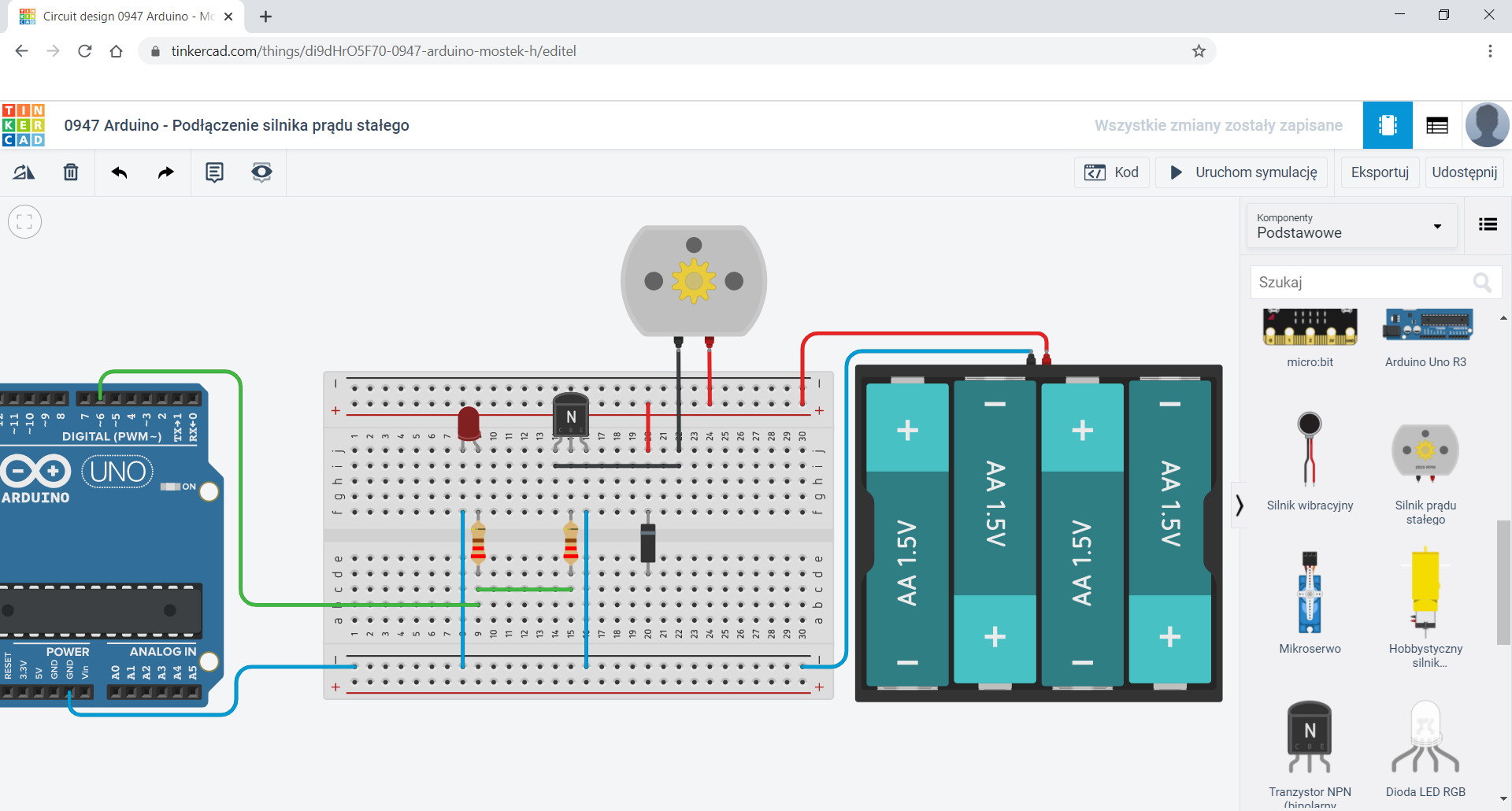
Kolektor tranzystora podepnij pod ujemny pin silnika.
RkIEnrgAobTyK
Zdjęcie przedstawia okno przeglądarki, w której otwarta jest strona Tinkercad, ułożony pośrodku obszaru edycji jest płytka stykowa, na której ustawiony jest tranzystor BJT z oznaczeniem litery 'N'. Po lewej stronie ustawiono LED, do której anody podłączono rezystor. Do bazy BJT podłączono rezystor. Po lewej stronie dostawiono arduino uno wraz z niepodpiętym kablem USB-B, z pinu GND do uziemienia płytki podpięto kabel. Uziemienie podłączono do katody LED oraz drugim kablem do emitera BJT. Z pinu 6 podłączono kabel do rezystora przy diodzie od niego kolejnym krótszym kablem podłączono drugi rezystor, w ten sposób utworzono połączenie równoległe. Obok prawego rezystora podłączono diodę prostowniczą, katodą skierowaną w górę. Na górze postawiono silnik elektryczny. Obok płytki stykowej ułożono zestaw baterii, widoczne są 4 baterie AA 1.5V. Silnik elektryczny podłączono pozytywnym terminalem do górnej dodatniej szyny płytki, tak samo jak katodę zestawu baterii oraz katodę diody prostowniczej. Ujemny terminal baterii podłączono do dolnej ujemnej szyny, tym samym do pinu GND arduino. Ujemny terminal silnika podłączono do kolektora BJT.
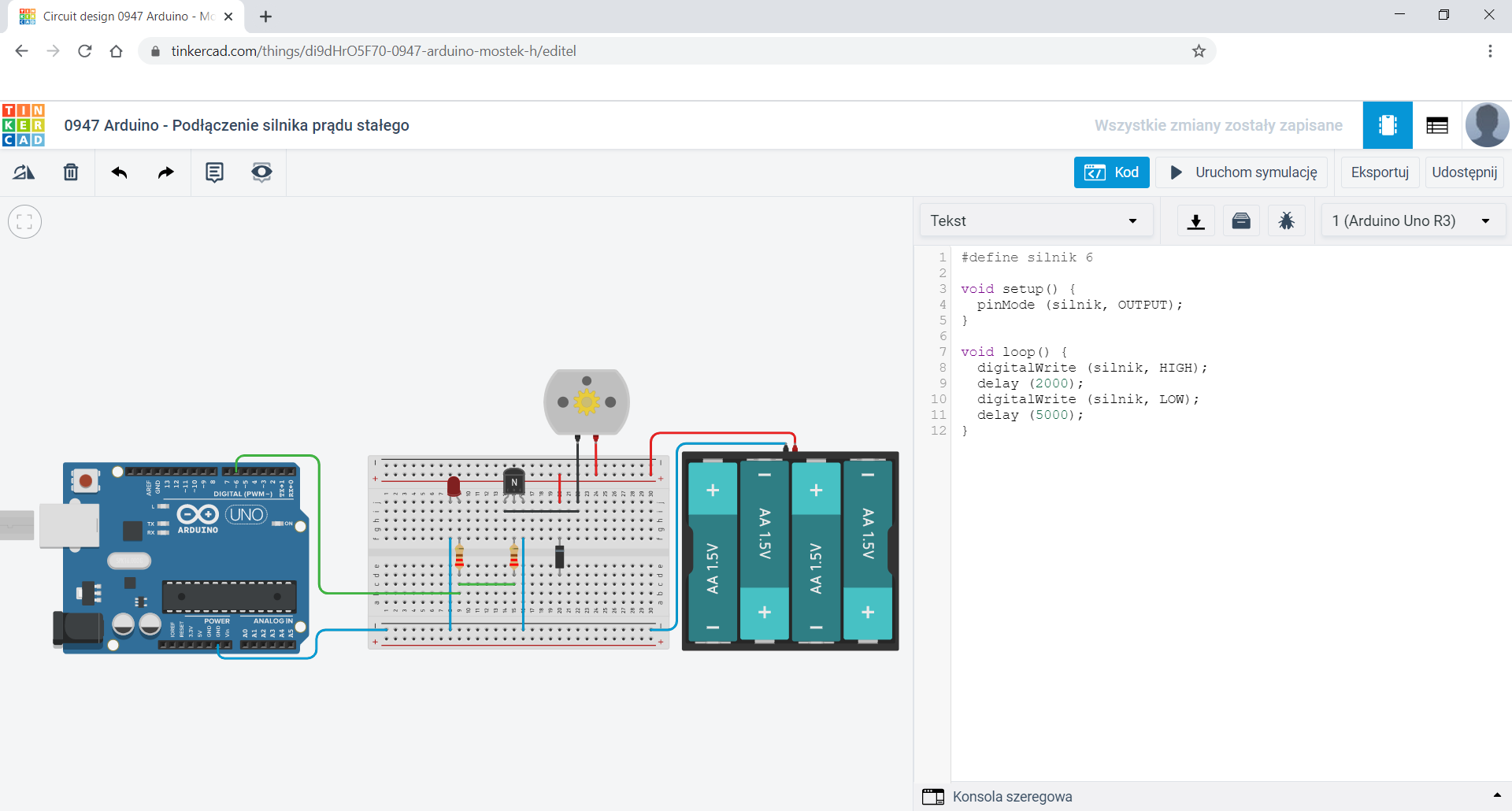
Przejdźmy teraz do pisania kodu. W tym celu klikamy na przycisk Kod, z listy rozwijanej wybieramy Tekst, potwierdzamy chęć zmiany widoku i czyścimy zawartość.
Przepisz kod, dopasuj widok okna i uruchom symulację.
Rni6YXXQ303WW
Zdjęcie przedstawia okno przeglądarki, w której otwarta jest strona Tinkercad, ułożony pośrodku obszaru edycji jest płytka stykowa, na której ustawiony jest tranzystor BJT z oznaczeniem litery 'N'. Po lewej stronie ustawiono LED, do której anody podłączono rezystor. Do bazy BJT podłączono rezystor. Po lewej stronie dostawiono arduino uno wraz z niepodpiętym kablem USB-B, z pinu GND do uziemienia płytki podpięto kabel. Uziemienie podłączono do katody LED oraz drugim kablem do emitera BJT. Z pinu 6 podłączono kabel do rezystora przy diodzie od niego kolejnym krótszym kablem podłączono drugi rezystor, w ten sposób utworzono połączenie równoległe. Obok prawego rezystora podłączono diodę prostowniczą, katodą skierowaną w górę. Na górze postawiono silnik elektryczny, ujemny terminal silnika podłączono do kolektora BJT, a pozytywnym terminalem do górnej dodatniej szyny płytki. Obok płytki stykowej ułożono zestaw baterii, widoczne są 4 baterie AA 1.5V, katodę zestawu baterii oraz katodę diody prostowniczej podłączono do górnej dodatniej szyny. Ujemny terminal baterii podłączono do dolnej ujemnej szyny, tym samym do pinu GND arduino. Po prawej stronie widoczny jest kod: #define silnik 6 void setup(){ pinMode(silnik, OUTPUT); } void loop(){ digitalWrite(silnik, HIGH); delay(2000); digitalWrite(silnik, HIGH); delay(2000); }
Mostek H to układ służący do sterowania kierunkiem obrotów wirnika silnika DC. Składa się on z czterech przełączników. Jeżeli styki przełączników znajdujących się po jednej z przekątnych są zamknięte, to właśnie przez nie płynie prąd, a wirnik silnika obraca się w jedną stronę. Jeżeli je otworzymy, a zamkniemy dwa pozostałe styki, prąd zmieni kierunek, a w rezultacie wirnik silnika zacznie obracać się w drugą stronę.
RTn9jB4AUWqS1
Ilustracja przedstawia konfigurację mostka H używanego do sterowania silnikiem ułożonym pośrodku układu. Przedstawiono 3 wersje przepływu prądu względem zamknięcia przełączników. Grafiki zawierają katodę układu u góry i anodę u dołu, od każdej odchodzą równolegle dwa przełączniki. Przełączniki jak i od katody, jak i od anody spotykają się przy wspólnych węzłach po lewej i po prawej stronie silnika. Pierwszy rysunek przedstawia wszystkie przełączniki otwarte. Drugi rysunek przedstawia lewy górny i prawy dolny przełącznik zamknięty. Natomiast trzeci, i ostani rysunek, przedstawia prawy górny i lewy dolny przełącznik zamknięty.
Działanie mostku H
styki otwarte - silnik się nie kręci
styki zamknięte po przekątnej - silnik kręci się w prawo
styki zamknięte po przeciwnej przekątnej - silnik kręci się w lewo
Mostek H nie jest samodzielnym elementem elektronicznym. Wmontowany jest na przykład w układ L293D. W tym układzie scalonym znajdziemy dwa mostki, więc idealnie nada się do sterowania dwoma silnikami. Układ ten ma 16 wyprowadzeń. Z takiego sterownika skorzystamy.
Dostępny jest również układ w wersji L293, jednak wersja bez oznaczenia „D” nie ma wbudowanych diod zabezpieczających przed przepięciami. Używając układu L293D nie musimy się martwić, że prąd wygenerowany przez poruszający się siłą bezwładności silnik (po wyłączeniu) spali jakiś element.
Układ L293D pokazujemy na zdjęciu niżej. Zwróć uwagę na wycięcie w kształcie półokręgu – dzięki niemu wiemy, z której strony znajdują się konkretne wyprowadzenia.
RIWa37QKIRM4m
Zdjęcie przedstawia komponent elektroniczny, który po każdej stronie prostopadłościennej bryły posiada po 8 nóżek. Na obudowie wyczuwalne jak i widoczne jest półkoliste wyżłobienie oznaczające górę komponentu.
Układ L293D
Opis wyprowadzeń układu L293D.
RzqCxsdeiL3Om
Ilustracja przedstawia rozkład pinów komponentu elektronicznego. Prostokąt posiada oznaczone po 8 pinów po każdej stronie, oznaczeniem góry prostokąta jest półkole u góry, przy krótszej ściance prostokąta. Względem wskazówek zegara, zaczynając od prawego górnego rogu, piny to: VCC 1, Input 4, OUTPUT 4, GND, GND, OUTPUT 3, INPUT 3, ENABLE 3 i 4, VCC 2, INPUT 2, OUTPUT 2, GND, GND, OUTPUT 1, INPUT 1, ENABLE 1 i 2.
Piny zasilania:
4, 5, 12, 13 - łączymy razem do masy (GND),
8 - zasilanie Vc silników (do 36V)
16 - zasilanie Vcc części logicznej (5V)
Piny sterujące silnikami:
2, 7 - wejścia określające kierunek obrotów pierwszego silnika
10, 15 - wejścia określające kierunek obrotów drugiego silnika
1 - wejście ENABLE określające prędkość pierwszego silnika
9 - wejście ENABLE określające prędkość drugiego silnika