Każdy silnik elektryczny funkcjonuje dzięki sile działającej na przewodnik z prądem znajdujący się w polu magnetycznymPole magnetycznepolu magnetycznym. To siła elektrodynamicznaSiła elektrodynamicznasiła elektrodynamiczna.
Umieśćmy ramkę z prądem w jednorodnym polu magnetycznym tak, jak zostało to przedstawione na Rys. 1. Wyznaczymy kierunki sił elektrodynamicznych działających na poszczególne boki ramki.
R1SZsRlV9lXMk
Rys. 1. Rysunek przedstawia ramkę z prądem umieszczoną w polu magnetycznym. Ramka z prądem jest prostokątna, narysowana w płaszczyźnie poziomej. Przez ramkę przepływa prąd elektryczny zgodnie z kierunkiem ruchu wskazówek zegara. Przez środki krótszych boków poprowadzona została oś w postaci czarnej przerywanej linii, dzieląca ramkę na część prawą oraz lewą. Ramka może obracać się wokół tej osi w kierunku przeciwnym do ruchu wskazówek zegara. Cały element został umieszczony w zewnętrznym polu magnetycznym o wektorze indukcji magnetycznej oznaczonym wielką literą B. Linie pola magnetycznego pokazano w postaci trzech niebieskich poziomych strzałek skierowanych w prawo. Ze środków dłuższych boków ramki wychodzą dwa wektory sił elektrodynamicznych. Wektory tych sił narysowano w postaci pionowych, zielonych strzałek. Siłę elektrodynamiczną opisano wielką literą F z indeksem dolnym małe litery ed. Wektor na lewym boku ramki skierowany jest pionowo w dół. Wektor siły przyłożony do prawego ramienia skierowany jest pionowo w górę.
Rys. 1.
Źródło: Politechnika Warszawska Wydział Fizyki, licencja: CC BY 4.0. Licencja: https://creativecommons.org/licenses/by/4.0/deed.pl.
Zauważ, że na części ramki położone najbliżej i najdalej od nas, siły nie działają (w tym położeniu ramki). To dlatego, że prądy płyną tam równolegle do linii pola magnetycznegoLinie pola magnetycznegolinii pola magnetycznego. Jeśli jednak ramka się obróci, siły te nie będą już miały wartości zerowych. Zostało to przedstawione na Rys. 2.
Rs0H4Et56oYCS
Rys. 2. Rysunek przedstawia ramkę z prądem umieszczoną w polu magnetycznym. Ramka z prądem jest prostokątna, narysowana w płaszczyźnie pochylonej względem poziomu o kąt około trzydziestu stopni. Lewa krawędź ramki widoczna jest wyżej niż krawędź prawa. Przez ramkę przepływa prąd elektryczny zgodnie z kierunkiem ruchu wskazówek zegara. Przez środki krótszych boków poprowadzona została oś w postaci czarnej przerywanej linii, dzieląca ramkę na część prawą oraz lewą. Ramka może obracać się wokół tej osi w kierunku przeciwnym do ruchu wskazówek zegara. Cały element został umieszczony w zewnętrznym polu magnetycznym o wektorze indukcji magnetycznej oznaczonym wielką literą B. Linie pola magnetycznego pokazano w postaci trzech niebieskich i poziomych strzałek skierowanych w prawo. Ze środków dłuższych boków ramki wychodzą dwa wektory sił elektrodynamicznych. Wektory tych sił narysowane zostały w postaci pionowych, zielonych strzałek. Siła elektrodynamiczna opisana jest wielką literą F z indeksem dolny małe litery ed. Wektor na lewym boku ramki skierowany jest pionowo w dół. Wektor siły przyłożony do prawego ramienia skierowany jest pionowo w górę. Do krótszych boków ramki przyłożono żółte strzałki. Strzałki skierowane są na zewnątrz ramki.
Rys. 2.
Źródło: Politechnika Warszawska Wydział Fizyki, licencja: CC BY 4.0. Licencja: https://creativecommons.org/licenses/by/4.0/deed.pl.
Ponieważ jednak wektory tych sił znajdują się w płaszczyźnie ramki, nie wpływają na jej obrót – ich moment siły wynosi zero. Ramka będzie się obracała za sprawą niezerowych momentów sił przyłożonych do boków ramki, równoległych do osi. Po pewnym czasie ramka osiągnie położenie przedstawione na Rys. 3.
RzzcLduMwWcRP
Rys. 3. Rysunek przedstawia ramkę z prądem umieszczoną w polu magnetycznym. Ramka z prądem jest prostokątna, narysowano ją w pozycji pionowej. Przez ramkę przepływa prąd elektryczny przeciwnie do ruchu wskazówek zegara. Przez środki krótszych boków poprowadzona została oś w postaci czarnej przerywanej linii, dzieląca ramkę na część górną oraz dolną. Ramka może obracać się wokół tej osi w kierunku przeciwnym do ruchu wskazówek zegara. Cały element został umieszczony w zewnętrznym polu magnetycznym o wektorze indukcji magnetycznej oznaczonym wielką literą B. Linie pola magnetycznego pokazano w postaci trzech niebieskich poziomych strzałek skierowanych w prawo. Ze środków dłuższych boków ramki wychodzą dwa wektory sił elektrodynamicznych. Wektory tych sił narysowano w postaci pionowych, zielonych strzałek. Siłę elektrodynamiczną opisano wielką literą F z indeksem dolnym małe litery ed. Wektor na górnym boku ramki skierowany jest pionowo w górę. Wektor siły przyłożony do dolnego ramienia skierowano pionowo w dół. Do krótszych boków ramki przyłożono żółte strzałki. Strzałki skierowane są na zewnątrz ramki.
Rys. 3.
Źródło: Politechnika Warszawska Wydział Fizyki, licencja: CC BY 4.0. Licencja: https://creativecommons.org/licenses/by/4.0/deed.pl.
W tym położeniu, momenty sił działających na boki równoległe do osi wynoszą również zero, wobec tego całkowity moment wypadkowy sił działających na ramkę zeruje się. Wartość siły wypadkowej także jest równa zero.
oraz
Mamy do czynienia z położeniem równowagi. Ramka przed chwilą jednak obracała się, wobec tego posiada pewien moment pędu i energię kinetyczną ruchu obrotowego, która pozwoli jej „przejść na drugą stronę” stanu równowagi. Jak wtedy będą działały siły?
Na Rys. 4. pokazana jest taka właśnie sytuacja. Wyróżniony czerwonym kolorem bok ramki znajdzie się teraz po lewej stronie od położenia równowagi. Tak jak poprzednio, prąd w nim płynie do nas. Wobec tego, kierunki sił elektrodynamicznych nie zmienią się. Ramka będzie obracała się teraz przeciwnie – w prawą stronę, zgodnie z ruchem wskazówek zegara (do położenia równowagi). Momenty sił elektrodynamicznych będą bowiem działać przeciwnie.
RKd45YYzc31Bh
Rys. 4. Rysunek przedstawia ramkę z prądem umieszczoną w polu magnetycznym. Ramka z prądem jest prostokątna narysowana w pozycji pionowej, ale pochylonej w taki sposób, że jej krótsze ramiona ustawione są od prawej dolnej strony rysunku do górnego jego lewego rogu. Przez ramkę przepływa prąd elektryczny przeciwnie do ruchu wskazówek zegara wzdłuż dłuższych boków zgodnie z ruchem wskazówek zegara wzdłuż boków krótszych. Przez środki krótszych boków poprowadzono oś w postaci czarnej przerywanej linii, dzieląca ramkę na część górną oraz dolną. Ramka może obracać się wokół tej osi w kierunku przeciwnym do ruchu wskazówek zegara. Cały element został umieszczony w zewnętrznym polu magnetycznym o wektorze indukcji magnetycznej oznaczonym wielką literą B. Linie pola magnetycznego pokazano w postaci trzech niebieskich poziomych strzałek skierowanych w prawo. Ze środków dłuższych boków ramki wychodzą dwa wektory sił elektrodynamicznych. Wektory tych sił narysowano w postaci pionowych, zielonych strzałek. Siłę elektrodynamiczną opisano wielką literą F z indeksem dolnym małe litery ed. Wektor na górnym boku ramki skierowany jest pionowo w górę. Wektor siły przyłożony do dolnego ramienia skierowany jest pionowo w dół. Do krótszych boków ramki przyłożono żółte strzałki. Strzałki skierowane są na zewnątrz ramki. Żółte strzałki również opisano jako siłę elektrodynamiczną.
Rys. 4.
Źródło: Politechnika Warszawska Wydział Fizyki, licencja: CC BY 4.0. Licencja: https://creativecommons.org/licenses/by/4.0/deed.pl.
Co zrobić, aby ramka obracała się cały czas w tę samą stronę tak, jak powinno to być w silniku? Można albo zmienić kierunek pola magnetycznego na przeciwny, albo kierunek prądu. W silniku komutatorowym, który omówimy dalej, zdecydowano się na to drugie rozwiązanie.
R56drPmodJkRo
Rys. 5. Rysunek przedstawia prostokątną ramkę z prądem, umieszczoną w polu magnetycznym, wytworzonym przez dwa magnesy. Prostokątną ramkę z prądem narysowano czarnymi liniami w płaszczyźnie pionowej. Dłuższe ramiona ramki skierowane są poziomo. Z dolnej części ramki wychodzą dwa przewody biegnące pionowo w dół. Ramka umieszczona jest w polu magnetycznym pomiędzy dwoma magnesami szczotkowymi. Magnesy szczotkowe pokazano w postaci prostopadłościennych elementów podzielonych na dwie części. Lewe części magnesu są czerwone i oznaczone jako biegun wielka litera S. Prawe części są niebieskie i opisane jako biegun magnetyczny wielka litera N. Ramka może obracać się wokół własnej osi w kierunku poziomym. Na tle ramki widoczne są linie pola magnetycznego w postaci niebieskich linii łączących magnesy, skierowanych od bieguna wielka litera N z lewej strony do bieguna, wielka litera S ze strony prawej. Pionowe przewody wychodzące z dolnej części ramki podłączone są do komutatora. Komutator pokazano w postaci dwuczęściowej, okrągłej opaski metalowej w postaci niezłączonych półokręgów. Jedna z okładek komutatora podłączona jest do przewodu lewego, a druga do prawego. Do okładek komutatora podłączone są szczotki widoczne w postaci małych prostopadłościennych elementów. Szczotki podłączone są do obwodu elektrycznego narysowanego w postaci prostokąta o czarnych krawędziach. Na dolnej krawędzi obwodu elektrycznego widoczne jest źródło napięcia. Źródło napięcia pokazano w postaci dwóch pionowych czarnych odcinków, z których prawy jest dłuższy, a lewy krótszy. Obok dłuższego odcinka w symbolu źródła napięcia widoczny jest znak plus oznaczający wyższy potencjał elektryczny. Obok krótszego odcinka w symbolu źródło napięcia widoczny jest znak minus oznaczający niższy potencjał elektryczny. Przez obwód przepływa prąd w kierunku zgodnym z ruchem wskazówek zegara. Przy takim podłączeniu do środków dłuższych ramion ramki przyłożono dwie siły wielka litera F. Siły narysowano w postaci czerwonych strzałek o równej długości, które mogą obracać ramkę zgodnie z ruchem wskazówek zegara.
Rys. 5.
Źródło: Politechnika Warszawska Wydział Fizyki, licencja: CC BY 4.0. Licencja: https://creativecommons.org/licenses/by/4.0/deed.pl.
Na Rys. 5. przedstawiona jest zasada działania takiego silnika. Komutator to dwa walcowate, oddzielone izolatorem półpierścienie, których dotykają tzw. szczotki, na stałe połączone z biegunami „+” i „-” źródła napięcia stałego. Pierścienie komutatora połączone są z obracającą się ramką, a szczotki ślizgają się po nich zapewniając zmianę kierunku prądu w ramce co pół okresu obrotu. Ramka będzie się wobec tego obracała cały czas w tę samą stronę.
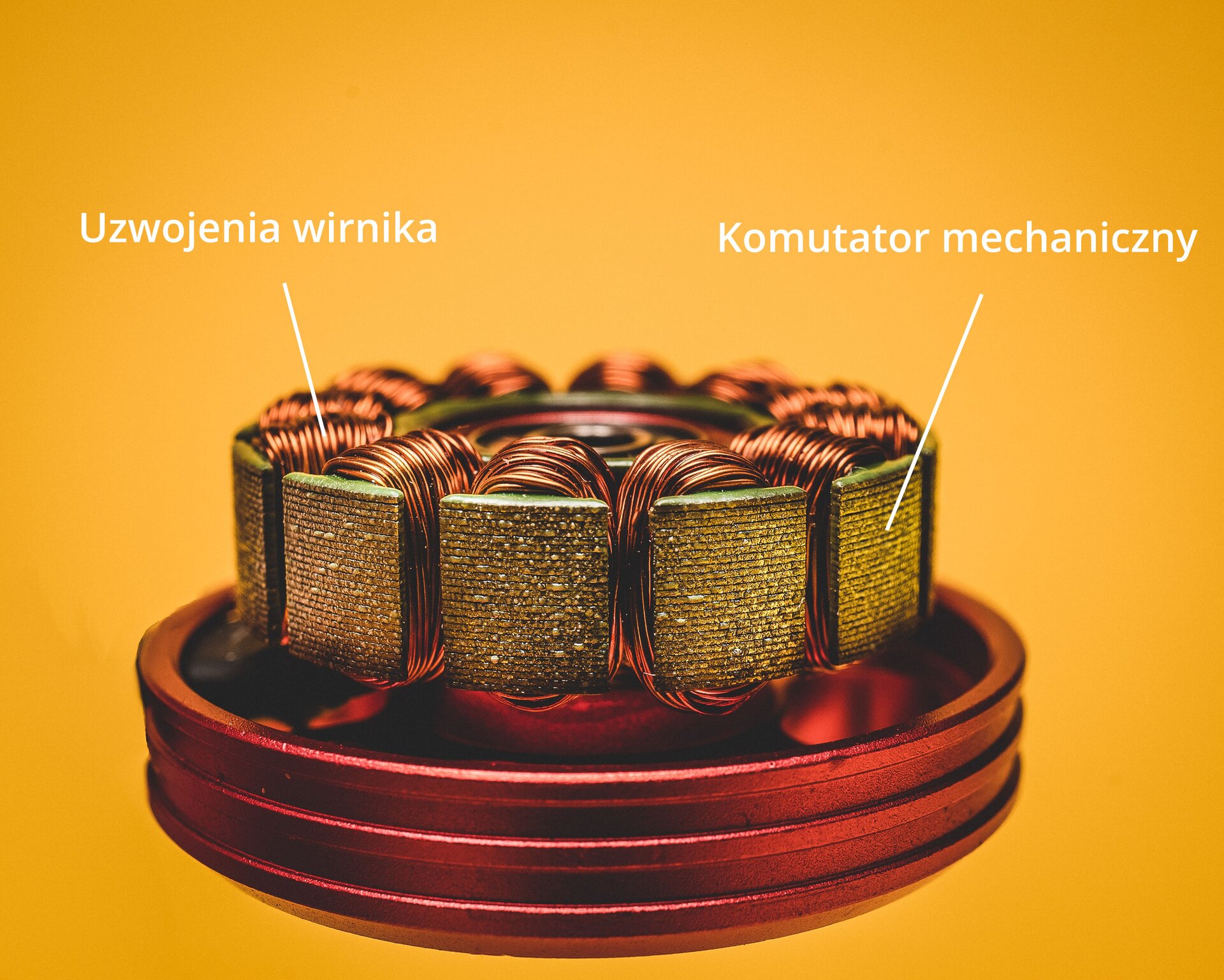
Obrót silnika z pojedynczą ramką byłby niejednostajny dlatego, że wypadkowy moment siły nie jest stały. W celu zapewnienia płynności obrotu stosuje się wiele ramek ustawionych pod pewnym kątem w stosunku do siebie. Oczywiście komutator jest odpowiednio podzielony tak, aby każdej ramce zapewnić zasilanie prądem w odpowiednim czasie i we właściwym kierunku. Widać to na zdjęciu na Rys. 6.
ROU3HDyNdJYfO
Rys. 6. Zdjęcie przedstawia silnik montowany w odkurzaczach. Pokazano okrągła miedziana podstawę, na której ułożono uzwojenia wirnika. Uzwojenia pokazano w postaci nawiniętych na cylindryczne elementy miedzianych drutów. Rozchodzą się one promieniście, tworząc okrąg. Do zewnętrznych części uzwojenia zamontowane są metalowe płytki. Metalowe płytki opisano jako komutator mechaniczny.
Rys. 6. Silnik odkurzacza. Zamiast pojedynczych ramek zastosowano uzwojenia zwiększając w ten sposób moment siły
Źródło: dostępny w internecie: https://unsplash.com/photos/SkUkZ2auN4E [dostęp 15.05.2022].
Zastosowanie komutatora nie jest jedynym sposobem zmiany kierunku prądu. Można to uczynić elektronicznie. Podajemy wtedy na ramkę sygnał napięciowy prostokątny – zmieniając naprzemiennie polaryzację. Rozwiązanie komutatorowe jest jednak częściej stosowane mimo, że szczotki zużywają się ze względu na tarcie, występuje też szkodliwe iskrzenie.
gdzie jest siłą elektromotoryczną ogniwa, a (na mocy prawa Faradaya). Wobec tego, po podstawieniu otrzymujemy:
Jeśli teraz pomnożymy to równanie obustronnie przez natężenie prądu, to otrzymamy:
Jaki sens mają poszczególne składniki tego równania?
jest mocą źródła – szybkością dostarczania energii przez źródło napięcia,
, to szybkość wydzielania się energii w postaci energii wewnętrznej (tzw. ciepła) na oporniku,
– to wyrażenie musi mieć sens mocy mechanicznej, czyli szybkości wykonywanej przez silnik pracy. Można to udowodnić rachunkiem.
Z powyższego widzimy, że źródło prądu stałego dostarcza zarówno energii powodującej ogrzewanie się przewodów, jak i energię użytą w celu wykonania pracy mechanicznej.
Dla zainteresowanych:
Pracę w silniku wykonuje moment pary sił elektrodynamicznych, który możemy zapisać następująco:
gdzie jest momentem magnetycznym ramki. Moc tego momentu siły można wyrazić:
Skorzystajmy z faktu, że moment magnetyczny ramki: . Wobec tego
Zauważmy, że nie wzięliśmy tu pod uwagę faktu, że co pół okresu zmienia się kierunek prądu w ramce i w związku z tym zwrot wektora . Moc wobec tego będzie cały czas dodatnia, co możemy zapisać tak:
Czy obliczona przez nas moc mechaniczna jest równa wyrażeniu ?
Jednak szybkość zmiany strumienia jest cały czas dodatnia i z tych samych powodów, co poprzednio powinniśmy zastosować wartość bezwzględną funkcji sinus. Ostatecznie, poprawny wzór na szybkość zmian strumienia indukcji magnetycznej jest następujący:
Po pomnożeniu tego wyrażenia przez natężenie prądu otrzymujemy moc mechaniczną.
Przedstawimy teraz budowę silnika zasilanego napięciem przemiennym? Będzie to silnik synchroniczny, bezkomutatorowy. Na Rys. 7. przedstawiono stojan tego silnika. Składa się on z dwóch par uzwojeń: xx’ i yy’, które wytwarzają pola magnetyczne o indukcji i wzajemnie prostopadłe.
R1E3Dnl8Sogx1
Rys. 7. Rysunek przedstawia schematycznie silnik synchroniczny, gdy wartość indukcji magnetycznej B kierunku z jest równa zero. Na ilustracji pokazano okrąg o grubej szarej krawędzi. Z obwodu okręgu wychodzą szare bolce do jego wnętrza wzdłuż osi pionowej i poziomej. Na bolce te nawinięty został drut, narysowany w postaci ciągłej czerwonej linii, spiralnie nawinięty na te elementy. Bolec po lewej stronie okręgu opisano małą literą x, a bolec po prawej małą literą x ze znakiem prim. Natężenie prądu, wielka litera I z indeksem dolnym mała litera x obok lewego bolca jest równe zero. Dolny bolec wychodzący z obwodu okręgu podpisano małą literą y a górny małą literą y ze znakiem prim. Natężenie prądu obok dolnego bolca wielka litera I z indeksem dolnym mała litera y jest równe zero. Bolce wychodzące z obwodu szarego okręgu nie łączą się w środku. W centralnej części okręgu widoczna jest pusta Biała przestrzeń. Wewnątrz pustego obszaru wewnątrz okręgu widoczny jest wektor indukcji magnetycznej wielka litera B. Wektor ten narysowano w postaci pionowej niebieskiej strzałki skierowanej w górę.
Rys. 7. Silnik synchroniczny w chwili, gdy wartość indukcji magnetycznej i występuje jedynie pole o indukcji
Źródło: Politechnika Warszawska Wydział Fizyki, licencja: CC BY 4.0. Licencja: https://creativecommons.org/licenses/by/4.0/deed.pl.
Jeśli do par uzwojeń przyłożyć napięcie przemienne przesunięte w fazie o , to otrzymamy wirujące pole magnetyczne, o stałej amplitudzie i częstości obrotów równej częstości zmian napięcia. Występuje tu pełna analogia do drgań mechanicznych – punkt materialny pobudzony jednocześnie do drgań prostopadłych o jednakowych amplitudach przesuniętych w fazie o porusza się po okręgu.
Jeśli teraz wewnątrz stojanu umieścimy obiekt obdarzony momentem magnetycznym : magnes, uzwojenie zasilane prądem stałym (jak jest najczęściej), to będzie się on obracał pod wpływem wirującego pola magnetycznego. Przypomnijmy, że położenie równowagi momentu magnetycznego w polu magnetycznym, to zgodność kierunków wektorów indukcji i momentu magnetycznego .
Słowniczek
Pole magnetyczne
Pole magnetyczne
(ang. magnetic field) – stan przestrzeni charakteryzujący się działaniem siły, zwanej siłą magnetyczną (Lorentza) na poruszający się ładunek umieszczony w tej przestrzeni bądź na obiekt obdarzony momentem magnetycznym; wielkością charakteryzującą pole magnetyczne jest wektor indukcji magnetycznej .
Linie pola magnetycznego
Linie pola magnetycznego
(ang. magnetic line of induction) – poglądowy obraz pola magnetycznego. Przebieg linii odzwierciedla układ wektorów indukcji magnetycznej w przestrzeni. W każdym punkcie linii pola zaczepiony jest wektor , styczny do tej linii.
Zjawisko indukcji elektromagnetycznej
Zjawisko indukcji elektromagnetycznej
wytwarzanie prądu indukcyjnego (SEM indukcji) w obwodzie zamkniętym, podczas zmiany strumienia pola magnetycznego przechodzącego przez ten obwód.
Strumieniem indukcji magnetycznej przez powierzchnię nazywamy iloczyn skalarny wektorów i . , gdzie .
Siła elektrodynamiczna
Siła elektrodynamiczna
(ang. electromagnetic force) – siła, która działa na przewodnik z prądem umieszczony w polu magnetycznym. Określa ją następujący wzór: , gdzie wektor jest wektorem o długości przewodnika l i kierunku i zwrocie zgodnym z kierunkiem prądu w przewodniku. Wartości siły elektrodynamicznej obliczymy posługując się zależnością
Występujący w tej zależności wektor jest prostopadły zarówno do wektora jak i do wektora .
Zwrot siły elektrodynamicznej wyznaczamy za pomocą reguły śruby prawoskrętnej, co pokazano na rysunku.
RAjRTsBenA4vg
Rysunek przedstawia prawą dłoń z kciukiem wyciągniętym do góry i zaciśniętymi pozostałymi palcami. Rysunek ten prezentuje regułę śruby prawoskrętnej. Dłoń narysowana jest czarną linią. Do punktu u podstawy palca wskazującego przyłożono trzy wektory. Wektory narysowano w postaci kolorowych strzałek. Jeden z wektorów jest czerwony i przedstawia kierunek natężenia prądu wielka litera I Wektor ten skierowany jest w dół i w prawo. Drugi z wektorów narysowano kolorem niebieskim i przedstawia on wektor indukcji magnetycznej wielka litera B. Skierowany jest w prawo i nieco w górę. Pomiędzy wektorami natężenia prądu i indukcji magnetycznej zaznaczono kąt mała grecka, litera theta. Trzeci z wektorów przedstawia siłą elektrodynamiczną wielka litera F z indeksem dolnym małe litery ed. Wektor ten jest prostopadły do dwóch pozostałych. Narysowano go zielonym kolorem i skierowano pionowo w górę.
Źródło: Politechnika Warszawska Wydział Fizyki, licencja: CC BY 4.0. Licencja: https://creativecommons.org/licenses/by/4.0/deed.pl.
Wektor momentu magnetycznego pętli z prądem
Wektor momentu magnetycznego pętli z prądem
możemy zapisać jako iloczyn natężenia prądu i wektora powierzchni .
Kierunek z zwrot wektora definiuje kierunek i zwrot wektora momentu magnetycznego , co zostało symbolicznie przedstawione na rys.
R122MUvyNkgqU
Rysunek prezentuje moment magnetyczny pętli z prądem. Pętlę z prądem narysowano w postaci okręgu leżącego w płaszczyźnie poziomej. Powierzchnia pętli opisana została wielką literą S. Przez pętlę przepływa prąd elektryczny w kierunku przeciwnym do ruchu wskazówek zegara. Natężenie prądu płynącego przez pętlę opisano wielką literą I. Ze środka okręgu wychodzi czarna pionowa strzałka skierowana w górę. Symbolizuje wektor momentu magnetycznego opisany małą grecką literą mi.
Źródło: Politechnika Warszawska Wydział Fizyki, licencja: CC BY 4.0. Licencja: https://creativecommons.org/licenses/by/4.0/deed.pl.
Magnetyczny moment dipolowy
Magnetyczny moment dipolowy
(ang. magnetic moment) definiuje się przez moment siły działający na niego w jednorodnym polu magnetycznym o indukcji w następujący sposób: .