Przypomnijmy na wstępie treść zasady zachowania momentu pędu – zmiana momentu pędu L dokonująca się w czasie ∆t wymaga przyłożenia momentu siły M :
Jeśli zatem do ciała nie są przyłożone momenty siły zewnętrznej, to jego moment pędu pozostaje stały. Moment pędu dla punktu materialnego definiujemy jako gdzie r – odległość punktu od osi obrotu, a p – pęd tego ciała. Dla bryły sztywnej , gdzie I – moment bezwładności bryły sztywnej, a ωomega – prędkość kątowa tej bryły.
Jakie zastosowanie może mieć powyższa zasada? Przede wszystkim zwróćmy uwagę na szybko obracające się masywne obiekty – będą one zachowywały swoją orientację w przestrzeni, ponieważ zmiana tej orientacji wymagałaby przyłożenia znacznego momentu siły. Takie właśnie urządzenia nazywamy żyroskopamiżyroskop (ang. gyroscope)żyroskopami, od greckiego gyros – obrót i skopeo – obserwować. W wersji rozrywkowej żyroskopy znamy pod nazwą bąka, zabawki widocznej na Rys. 1., znanej od starożytności.
R1YhO0uDIVXW9
Rys. 1. Zdjęcie przedstawia bąka zabawkę. To owalny elipsowaty przedmiot z wystającą częścią przypominającą walec u góry. Bąk obraca się wokół własnej osi pionowej na poziomej powierzchni (można przyjąć, że na podłodze lub drewnianym blacie). Bąk jest w kolorowe paski. Im szybciej obraca się zabawka, tym większy jest jej moment pędu. Pamiętajmy, że moment pędu liczony jest jako iloczyn momentu bezwładności i prędkości kątowej. Moment bezwładności bryły sztywnej jest wartością stałą, natomiast wartość prędkości kątowej zależy od prędkości liniowej z jaką obraca się punkt na obwodzie bryły.
Rys. 1. Bąki - żyroskopy jako zabawki.
Źródło: dostępny w internecie: https://unsplash.com/photos/hGb5WqRrWIg [dostęp 12.04.2022], domena publiczna.
Historia żyroskopów jako przyrządów pomiarowych sięga połowy XIX wieku, kiedy to francuski fizyk Leon FoucaultLeon FoucaultLeon Foucault (czyt: fuko) pracował nad unowocześnieniem kompasów. W jego czasach intensywnie rozwijała się żegluga pełnomorska, ze względu na podboje kolonialne europejskich imperiów. W związku z tym coraz większej wagi nabierała kwestia nawigacji na otwartym morzu – oczywiście wykorzystując gwiazdy można nawigować tylko w nocy i przy dobrej pogodzie, a kompasy z igłą magnetyczną niestety kiepsko się sprawowały na wielkich stalowych okrętach (ze względu na własności magnetyczne żelaza). Ponadto kompas z igłą magnetyczną wskazuje na biegun magnetyczny, a nie na biegun geograficzny Ziemi. Jednakże moment pędu wirującego koła zachowany jest niezależnie od pory dnia, pogody czy miejsca, w którym to koło się znajduje – stąd pomysł wykorzystania go do wskazywania stałego kierunku. Na rysunku 2 widoczna jest replika oryginalnej konstrukcji Foucaulta oraz model 3D żyroskopu, który może obracać się w dowolnym kierunku.
R1PxYOVFEC6RG
Rys. 2a. Zdjęcie przedstawia replikę oryginalnego żyrokompasu Foucaulta. Żyrokompas to metalowe urządzenie ustawione na trójnogu. Metalowy trójnóg składa się z trzech śrub, którymi można poziomować urządzenie. Na trójnogu znajduje się pionowy metalowy statyw. W połowie wysokości statywu widoczna jest główna część żyrokompasu. Główna część żyrokompasu składa się z metalowego pierścienia, który jest odchylony od kierunku pionowego (na prezentowanym zdjęciu w prawo). Pierścień zamocowany jest na pionowym pręcie. Prostopadle do powierzchni metalowego pierścienia zamocowany jest drugi prosty metalowy element. Metalowy element prostopadły do płaszczyzny wyznaczonej przez pierścień jest ciężki, dąży do ustawienia pionowego. Jakiekolwiek odchylenie pionowego elementu pozwala na wyznaczenie kąta odchylenia od kierunku poziomego powierzchni, na jakiej stoi urządzenie.
Źródło: dostępny w internecie: https://commons.wikimedia.org/wiki/File:Foucault_gyroscope-CnAM_7688-IMG_5428-white.jpg [dostęp 12.04.2022], licencja: CC BY-SA 3.0.
R1Fcucf3Fm45A
Rys. 2b. Animowana symulacja bez udziału lektora prezentuje model żyroskopu o trzech stopniach swobody. Budowa modelu to trzy współśrodkowe szare pierścienie, które obracają się względem siebie. Pierścienie mają różną średnicę. Wewnątrz najmniejszego pierścienia ustawiono pionowo pręt koloru brązowego. W połowie wysokości pręta zamocowany jest poziomy dysk. Dysk obraca się w kierunku zgodnym z ruchem wskazówek zegara w płaszczyźnie poziomej.
Rys. 2b. Animowana symulacja bez udziału lektora prezentuje model żyroskopu o trzech stopniach swobody. Budowa modelu to trzy współśrodkowe szare pierścienie, które obracają się względem siebie. Pierścienie mają różną średnicę. Wewnątrz najmniejszego pierścienia ustawiono pionowo pręt koloru brązowego. W połowie wysokości pręta zamocowany jest poziomy dysk. Dysk obraca się w kierunku zgodnym z ruchem wskazówek zegara w płaszczyźnie poziomej.
Rys. 2b. Model żyroskopu o trzech stopniach swobody.
Rys. 2b. Animowana symulacja bez udziału lektora prezentuje model żyroskopu o trzech stopniach swobody. Budowa modelu to trzy współśrodkowe szare pierścienie, które obracają się względem siebie. Pierścienie mają różną średnicę. Wewnątrz najmniejszego pierścienia ustawiono pionowo pręt koloru brązowego. W połowie wysokości pręta zamocowany jest poziomy dysk. Dysk obraca się w kierunku zgodnym z ruchem wskazówek zegara w płaszczyźnie poziomej.
Dlaczego żyrokompas był w stanie wskazywać ziemski biegun geograficzny? Zwróćmy uwagę, że żyroskop z rysunku 2b znajduje się w tak zwanym zawieszeniu Cardana, umożliwiającym mu obracanie dookoła trzech osi X, Y, Z. Jeśli wprawiony jest on w ruch obrotowy, to obracanie konstrukcją nie zmieni położenia żyroskopu, wektor moment pędu będzie wskazywał dokładnie ten sam kierunek, w którym został rozkręcony – zakładając idealną konstrukcję zawieszenia, czyli brak tarcia na łożyskach. Możemy zmodyfikować tę konstrukcję, blokując jeden stopień swobody – w taki sposób, aby oś wirowania żyroskopu była zawsze styczna do poziomu. Na rysunku 3 demonstrujemy konsekwencje takiego działania – na skutek ruchu obrotowego Ziemi do ramy konstrukcji przyłożony będzie moment siły wymuszający obrót żyroskopu do położenia wskazującego biegun. Wektor momentu pędu zajmie położenie równoleżnikowe – taka jest idea działania żyrokompasu Foucaulta.
R1JzQDuB4qGJ3
Rys. 3. Ilustracja podzielona jest na dwie części. Lewa część opisana małą literą a pokazuje rysunek przedstawiający wycinek sfery. Wycinek ten jest fragmentem górnej części sfery. Z jej środka poprowadzone są trzy linie. Jedna z linii biegnie w lewo w dół i kończy się na obwodzie sfery. Druga linia biegnie pionowo opisana jest jako prędkość kątowa małą grecką literą omega ze strzałką oznaczającą wektor. Trzecia linia skierowana jest w lewo w górę i przechodzi przez obwód sfery. Ostatnia z linii symbolizuje realną oś obrotu, wokół której obraca się sfera. W idealnym przypadku sfera powinna obracać się w płaszczyźnie poziomej. Jeżeli sfera obraca się wokół osi innej niż pionowa, obserwujemy różnicę w momencie pędu. Moment pędu opisany wielką literą L ze strzałką oznaczającą wektor, względem osi innej niż oś pozioma powoduje powrót sfery do obrotu względem osi pionowej. Moment pędu zaznaczono w postaci czarnej strzałki skierowanej w prawo i nieco w górę, przechodzącej przez punkt, w którym ostatnia z linii biegnącej od środka sfery przecina jej obwód. Prawa część rysunku opisana małą literą b pokazuje fragment sfery wycięty z jej górnej lewej części. Z jej środka wychodzą trzy ciągłe linie. Pierwsza z linii biegnie w lewo w dół aż do obwodu sfery. Druga z linii biegnie pionowo w górę i jest zakończona grotem u szczytu – symbolizuje oś obrotu. Oś opisana jest jako prędkość kątowa, małą grecką literą omega ze strzałką oznaczającą wektor. Trzecia linia biegnie w lewo w górę aż do obwodu sfery. Sfera obraca się w płaszczyźnie poziomej przeciwnie do ruchu wskazówek zegara. Jeżeli obwód bryły obserwowany jest w płaszczyźnie poziomej, to moment pędu skierowany jest z punktu znajdującego się na obwodzie sfery ku osi obrotu. Kierunek wektora momentu pędu jest styczny do sfery. Wektor momentu pędu narysowano w postaci czarnej strzałki przechodzącej przez punkt, w którym ostatnia z linii styka się z obwodem sfery. Strzałka skierowana jest stycznie do obwodu sfery w górę i w prawo.
Źródło: Politechnika Warszawska, Wydział Fizyki, licencja: CC BY 4.0.
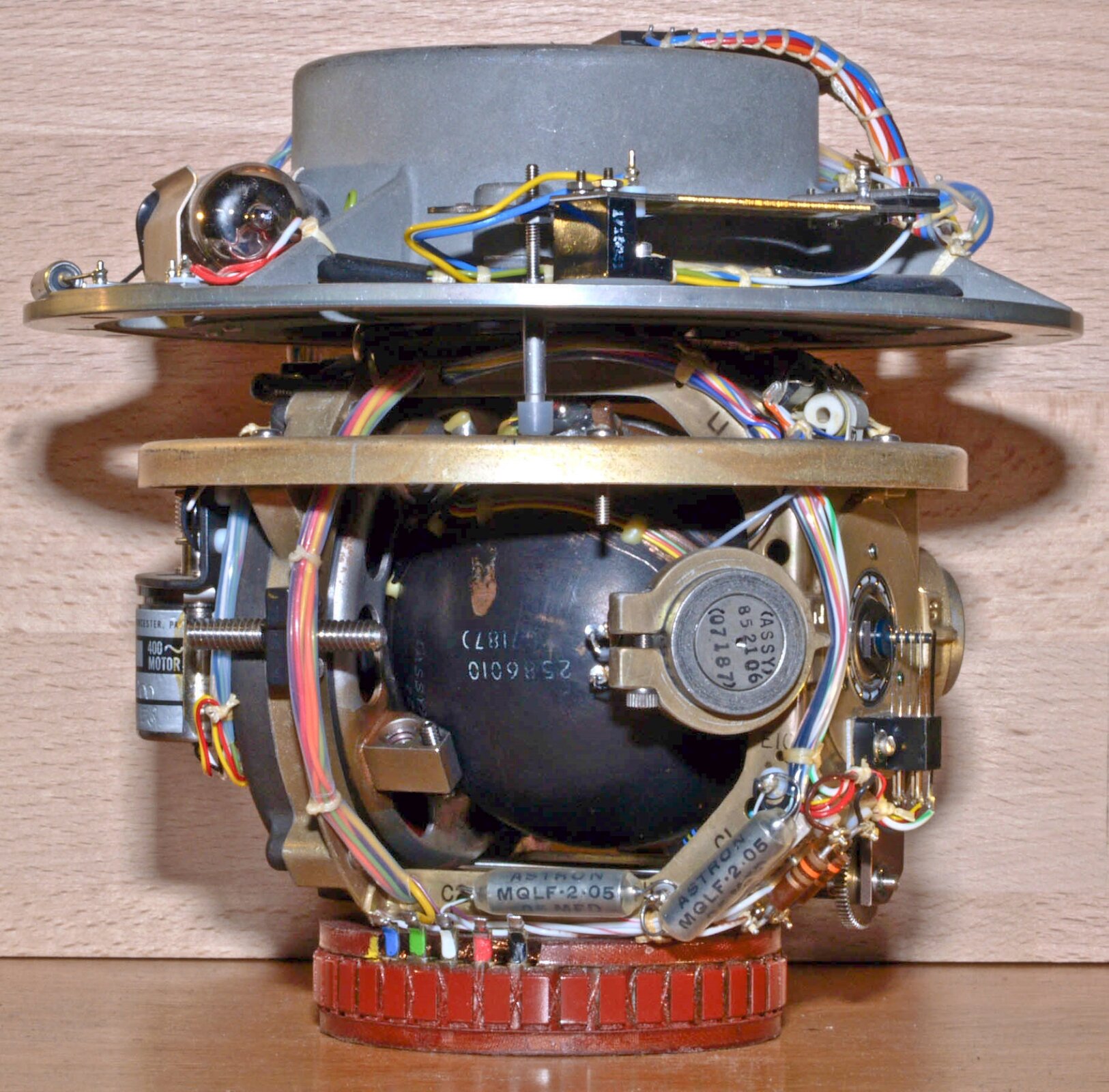
Niestety w praktyce w XIX wieku konstrukcja nie spełniła swego zadania – kołysanie statku przez fale wprowadzało dodatkowe, losowe, momenty sił, zaburzające pracę tego żyrokompasu. Dopiero w pierwszej połowie XX wieku zmodyfikowano konstrukcję zawieszenia Cardana, ulepszono technologię wykonywania łożysk oraz użyto sprawniejszych silników elektrycznych rozpędzających wirująca masę. W efekcie uzyskano żyrokompasy jak na rysunku 4, powszechnie wykorzystywane w nawigacji morskiej.
R1YPWZmXIlUrr
Rys. 4. Zdjęcie przedstawia współczesny żyrokompas elektroniczny. Wewnątrz urządzenia widoczna jest sferyczna obudowa koloru szarego. Wewnątrz tej obudowy znajduje się główna część żyrokompasu. Sferyczny element umieszczony jest w metalowym stelażu. Wokół niego widać wiele kolorowych przewodów elektrycznych. Żyrokompas umieszczony jest na elemencie przypominającym niski walec. W górnej części urządzenia widoczny jest kolejny walcowy element ustawiony w kierunku pionowym. Wokół niego również widać wiele kolorowych przewodów. Ze względu na duże prędkości, z jakimi poruszały się samoloty, żyrokompasy nie znalazły zastosowania w nawigacji. Wykorzystuje się je jednak w lotnictwie w urządzeniach zwanych "sztucznym horyzontem". "Sztuczny horyzont" pozwala na wyznaczenie odchylenia samolotu od kierunku poziomego.
Rys. 4. Współczesny żyrokompas elektroniczny.
Źródło: dostępny w internecie: https://commons.wikimedia.org/wiki/File:Gyroscope_hg.jpg [dostęp 12.04.2022], licencja: CC BY-SA 2.5.
Niestety żyrokompasy nie przyjęły się w nawigacji lotniczej, ze względu na bardzo dużą prędkość ruchu tych maszyn. Wartość tego samego rzędu co prędkość liniowa punktów na powierzchni Ziemi spowodowałaby konieczność wprowadzania skomplikowanych poprawek. Jednakże żyroskopy wykorzystuje się w lotnictwie w innym celu – w przyrządzie zwanym „sztucznym horyzontem”, widocznym na rysunku 5. Wewnątrz obudowy umieszczony jest żyroskop o dwóch stopniach swobody – oś główna pozostaje nieruchoma i niezależnie od wychylenia samolotu w trakcie manewrów, wskaźnik horyzontu pozostaje w pozycji poziomej:
RyRRh2PBAGa5z
Rys. 5. Zdjęcie przedstawia współczesny tzw. "sztuczny horyzont" wykorzystywany w lotnictwie. W przedniej części prostopadłościennego urządzenia widoczne jest okrągłe okienko. W okienku tym widać fragment kuli. Kula podzielona jest poziomo na dwie równe części górną i dolną. Górna część jest koloru niebieskiego i symbolizuje niebo. Dolna część jest koloru brązowego i symbolizuje grunt. Na obwodzie w dolnej części okienka widoczna jest podziałka kątowa. Jeżeli linia dzieląca kulę na część górną i dolną widoczna jest w kierunku poziomym, to znaczy, że samolot nie jest odchylony od tego kierunku.
Rys. 5 . Sztuczny horyzont - przyrząd lotniczy.
Źródło: dostępny w internecie: https://commons.wikimedia.org/wiki/File:Artificial_Horizon_%E2%80%94_AGB-3.jpg [dostęp 12.04.2022], domena publiczna.
Żyroskopy stosowane są nie tylko w nawigacji morskiej i lotniczej – spotykamy się z nimi na każdym kroku, gdy mamy do czynienia ze stabilizacją jakiegoś ruchu. Przykładowo – spójrzmy na widoczne na rysunku 6 urządzenia typu „Segway”. Ruch za pomocą tych pojazdów nie wymaga żadnego działania mechanicznego typu odepchnięcie się nogą czy „dodatnie gazu” przekręcając manetkę (jak w motocyklu czy hulajnodze elektrycznej). Pojazd jedzie zgodnie z kierunkiem naszego wychylenia – wytwarzamy moment siły, który jest wykrywany przez komputer pokładowy za pomocą układów żyroskopowych, a następnie kompensowany:
Rcuh2fTAQQA1H
Rys. 6. Ilustracja przedstawia trzy zdjęcia prezentowane obok siebie. Zdjęcia pokazują pojazdy typu Segway, w których wykorzystywane są żyroskopy. Na lewym zdjęciu pokazano zbliżenie na koło samojezdne. Koło porusza się po brukowanej nawierzchni. Po bokach koła na małych platformach stawia się stopy. Osoba poruszająca się na kole samojezdnym utrzymuje równowagę dzięki wykorzystaniu w urządzeniu żyroskopu. Pochylenie się osoby poruszającej się kołem samojezdnym w przód lub w tył skutkuje ruchem pojazdu w tym kierunku. Pochylenie się osoby w dowolnym kierunku powoduje przesunięcie dużej masy wewnątrz koła, stabilizującej jego ustawienie i zapobiegającej wywróceniu się pojazdu. Środkowe zdjęcie pokazuje ustawione w rzędzie Sewaye. Urządzenie typu Segway zbudowane jest z dwóch kół ustawionych na jednej wspólnej poziomej osi. Koła owleczone są czarnymi, napompowanymi powietrzem oponami. Na osi łączącej koła zamontowana jest platforma, na której staje użytkownik pojazdu. W przedniej części platformy umieszczona jest pionowa kierownica, którą trzyma użytkownik. Jeśli użytkownik pojazdu pochyli się w przód bądź w tył, Segway zacznie poruszać się w tym kierunku. Zdjęcie po prawej pokazuje mężczyznę poruszającego się na elektrycznej deskorolce. Deskorolka taka zbudowana jest z dwóch małych kółek połączonych metalową osią, na której zamontowana jest platforma gdzie staje użytkownik. W odróżnieniu od typowej deskorolki, oś łącząca koła jest skierowana prostopadle do płaszczyzny kół. Pochylenie się w przód lub w tył osoby stojącej na platformie powoduje ruch pojazdu w danym kierunku. We wszystkich zaprezentowanych urządzeniach wykorzystuje się żyroskopy do określenia pozycji pojazdu względem kierunku poziomego i pionowego.
Rys. 6 Pojazdy typu Segway.
Źródło: dostępny w internecie: https://pixabay.com/pl/photos/mobilno%C5%9B%C4%87-ko%C5%82o-powietrzne-monocykl-513823/ [dostęp 12.04.2022], https://pixabay.com/pl/photos/budapeszt-w%c4%99gry-segway-wycieczka-2030135/ [dostęp 12.04.2022], https://pixabay.com/pl/photos/segway-dwa-ko%c5%82a-promenada-natura-2481569/ [dostęp 12.04.2022], domena publiczna.
Ze stabilizacją ruchu mamy do czynienia również w popularnych gimbalach używanych w połączeniu z telefonami komórkowymi lub profesjonalnych stabilizatorach obrazu wykorzystywanych do aparatów fotograficznych i kamer. Również w przestrzeni kosmicznej, aby zachować pożądaną orientację względem Ziemi lub wybranych gwiazd, stosuje się układy żyroskopowe.
R40sPq63ZEpKB
Rys. 7a. Ilustracja prezentuje po lewej telefon komórkowy zamocowany na metalowym stelażu. Telefon komórkowy to płaski prostopadłościenny element z ekranem skierowanym do widza. Pokazuje czynność wykonywania zdjęcia. Aparat telefoniczny odchylony jest od kierunku poziomego, jednak wykonane zdjęcie wygląda tak, jakby użytkownik idealnie ustawił urządzenie. Dzieje się tak, dzięki wbudowanemu żyroskopowi. Wykorzystywany jest w aparacie fotograficznym, zamontowanym w telefonie, do poprawy jakości zdjęć. Żyroskop służy również w telefonie komórkowym do jego stabilizacji. Zdjęcie po prawej prezentuje kamerę zamontowaną na wysięgniku umieszczonym pod dronem. Obiektyw kamery stanowi cylindryczny element skierowany do osoby oglądającej zdjęcie. Z łatwością można pomyśleć, że zdjęcie wykonywane z lecącego drona będzie nieostre i rozmyta. Tak się jednak nie dzieje, ponieważ każdy dron ma wbudowany żyroskop. Żyroskop pozwala na ustabilizowanie lotu. Drugi żyroskop wmontowany jest w aparat fotograficzny. Żyroskop ten służy do stabilizacji obrazu i poprawy jakości wykonywanych zdjęć.
Rys. 7a . Żyroskopowe stabilizatory w różnych odsłonach - stabilizator obrazu.
Źródło: dostępny w internecie: https://unsplash.com/photos/jg3NTQilepo [dostęp 13.04.2022], https://unsplash.com/photos/3rrEPsWw26k [dostęp 13.04.2022], domena publiczna.
RT97HlrwcQg68
Rys. 7b. Zdjęcie przedstawia teleskop Hubble'a. Na czarnym tle przestrzeni kosmicznej pokazano teleskop w postaci cylindrycznego urządzenia, umieszczony na orbicie Ziemi. Teleskop pokryty jest aluminiową obudową chroniącą go przed niskimi temperaturami w Kosmosie. Na bokach teleskopu umieszczone są dwa płaskie prostokątne panele słoneczne. Teleskop pochylony jest względem kierunku poziomego w prawo. Ustawienie teleskopu korygowane jest za pośrednictwem żyroskopów. Konkretne ustawienie teleskopu jest istotne, ponieważ pozwala na wykonywanie zdjęć wybranego fragmentu przestrzeni kosmicznej.
Rys. 7b . Żyroskopowe stabilizatory w różnych odsłonach - teleskop Hubble'a.
Źródło: dostępny w internecie: https://commons.wikimedia.org/wiki/File:HST-SM4.jpeg [dostęp 13.04.2022], domena publiczna.
Słowniczek
Leon Foucault
Leon Foucault
francuski fizyk i astronom (1819‑1868), znany głównie z konstrukcji pierwszych żyroskopów oraz zademonstrowania dzięki wahadłu działania siły Coriolisa (dziś zwanego wahadłem Foucaulta).
żyroskop (ang. gyroscope)
żyroskop (ang. gyroscope)
od greckiego gyros – obrót i skopeo – obserwować. Urządzenie służące do utrzymania lub zmierzenia zmiany położenia (orientacji) w przestrzeni. Mechanizm jego działania opiera się na zasadzie zachowania momentu pędu.